
ハーバード大学にて、3Dプリンティング、機械工学、マイクロ流体工学を専門とする研究チームが「Octobot(オクトボット)」と呼ぶロボットを開発した。

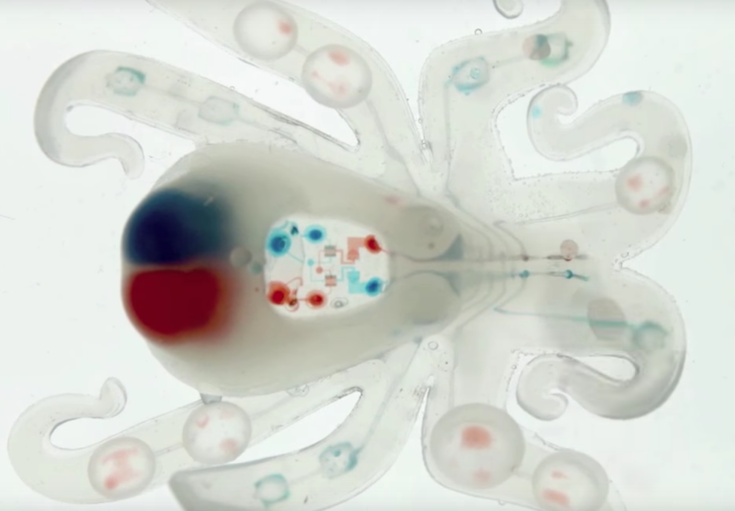
見た目はまるでタコだが、タコ同様の柔らかい、つまり骨格を持たない設計となっている。また内蔵されるパーツも全てソフトな素材で構成されている。
実際にタコの見た目だけではなく、機能面でも模したロボットである。

サーボなどの稼働に必要とされるパーツも内蔵することなく、空気圧ベースで稼働する。手足の駆動は、過酸化水素から発生した酸素が膨張することで駆動される仕組みとなっている。
蛍光ピンク色の一過性インクと、青色の超弾性アクチュエータ層がスケルトンボディの内側にあるのが確認できる。
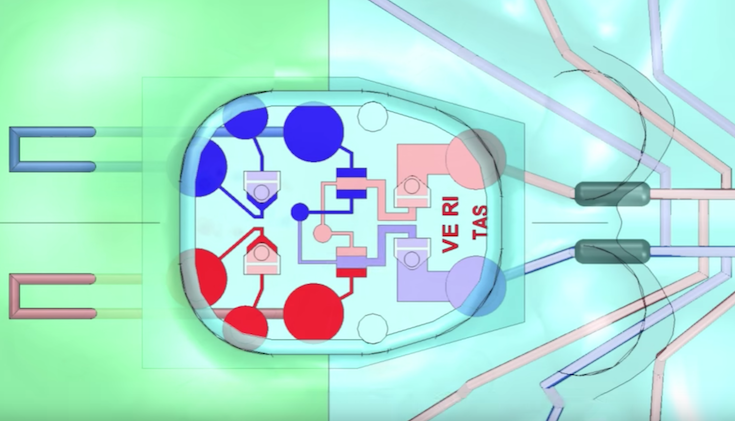
そして、シンプルながらも自律行動(オートノマス)を行えるシステムとなっているのが最大の特徴となっている。
マイクロ流体論理を駆使した回路が組み込まれており、過酸化水素の膨張を回路に見立てて利用することで、シンプルなソフトウェアがネットワーク上で稼働するようになっている。現時点では1本ずつ手足を伸ばしていくような動きが可能である。
公開されている動画で、3Dプリンタでの製造過程から、実際の動きの様子が確認できる。
まだ単純な動きのみがプログラムされている状態だが、今後、さらに実際のタコに近づける研究が進むことを期待したい。
僕はこう思った:
泳げるようになって、墨でも吐くようになったらすごいね。それはともかく、今回の設計・駆動システムは、硬い筐体・サーボ・電源といった今までのロボットの既成概念を覆すロボットの登場に繋がる可能性もあるので、引き続きウオッチしていきたいと思います。
泳げるようになって、墨でも吐くようになったらすごいね。それはともかく、今回の設計・駆動システムは、硬い筐体・サーボ・電源といった今までのロボットの既成概念を覆すロボットの登場に繋がる可能性もあるので、引き続きウオッチしていきたいと思います。



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
中橋 義博PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

