日本は産業用ロボットで世界をリードし、ロボットが活用される範囲はますます広がりをみせている。
一方で、日本は自然災害も多いため、災害対応ロボットの開発が積極的に行われ、その活躍が期待されている。実際、東日本大震災および福島原子力発電所の事故では、人が立ち入ることが困難なエリアで活動するロボットの必要性が認識され、実際に多くのロボットが現場投入された。そこにはロボカップで競い、革新的な働きを見せた技術も導入されている。
このような災害対応ロボットは他のロボットに比べ、多種多様な環境で使用され、求められる作業も多様だ。そのためロボットのタイプは、脚型、ヘビ型、クローラ(無限軌道)型、ヒューマノイド型、マルチコプターなど多岐にわたり、また、関連するテクノロジーも、制御技術、センサー、通信、遠隔操作など多くの技術分野との連携が必要になる。
災害対応ロボットの開発や動作検証にはシミュレータの活用が有効だが、現状では、多様なタイプの災害対応ロボットを高精度にシミュレートできるシミュレータは存在しておらず、その開発が急務となっている。
この課題に対し、株式会社ブイエムシーは産総研(国立研究開発法人 産業技術総合研究所)と共同研究してロボットシミュレータを開発している。
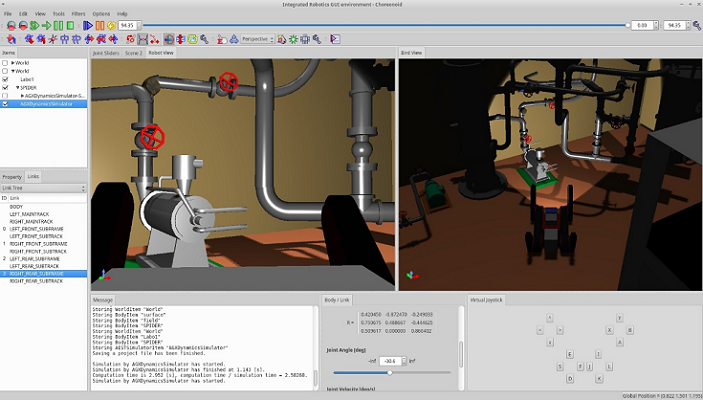
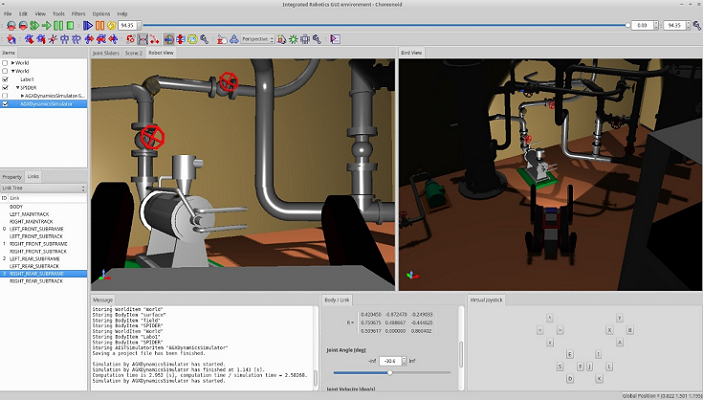
この研究では、同社が販売・サポート提供を行っているスウェーデンの物理エンジン開発企業であるAlgoryx Simulation ABとも連携、Algoryx社が開発するシュミレータ開発者のための開発ツールキット、物理エンジン「AGX Dynamics」を、産総研が開発を進める統合ロボットシミュレータ「Choreonoid(コレオノイド)」へ実装することも想定している。
「Choreonoid」は、高機能なグラフィカルユーザインタフェースと高速、高精度なシミュレーション性能を有しており、産総研での二足歩行ヒューマノイドロボットの研究開発に活用されている。
ロボット・マテリアルハンドリング・ピッキンングシュミレーション
■ Robot simulation with cables
■ Robot grasping simulation in AGX Dynamics
物理エンジン「AGX Dynamics」を実装した「Choreonoid」は、2018年10月に開催される「World Robot Summit 2018」のトンネル事故災害対応・復旧競技、並びに2018年から順次開所予定の「福島ロボットテストフィールド」に設置される模擬プラント用ロボットシミュレータ、現在研究・開発が進むImPACT「タフ・ロボティクス・チャレンジ」の評価用シミュレータなど、災害対応ロボット開発に関する幅広い用途への活用が期待されている。
共同研究概要
共同研究により以下の機能追加と性能向上を目指す。
機能追加
●災害対応ロボットが行う作業を実現するための機能
・クローラモデルの精緻なシミュレーションと不整地踏破
・災害現場で必要な物体の破壊
・消火ホースを使った消火活動
・多量な瓦礫などの除去・運搬
・変形地面の再現
・電源ケーブル取り回しなどのケーブルシミュレーション
性能向上
●同時にシミュレーションを行うことができる環境の規模拡大
●シミュレーションの安定性向上



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
ロボスタ編集部PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

