

あなたの背中が見えたが、まだ遠かった。
あなたをもっと知れば、もっとあなたに近づけるだろうか?

動画の中で語られた「MOTOBOT Ver.2」の言葉だ。
「MOTOBOT Ver.2」(以下モトボット)は人間のオートバイを運転(ライディング)するために作られた、ヤマハ発動機が開発した自律型ロボット。
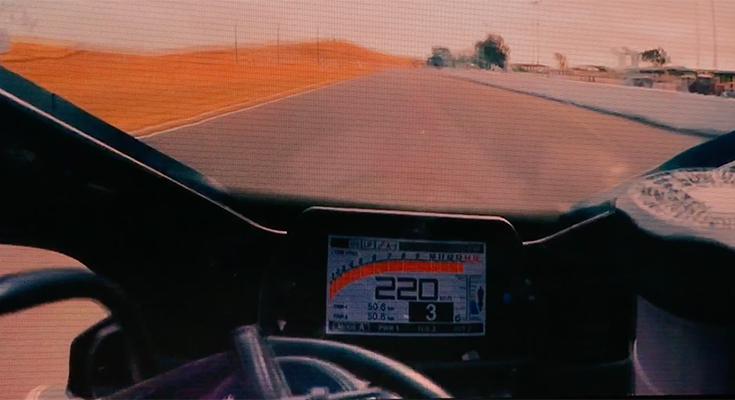
モトボットは、サーキットで200km/hオーバーで走行することを目標にテストと開発が進められ、ついにその目標を達成した。
そして、次の目標はモーターバイク・レースの最高峰のひとつ「MotoGP」のトップライダー、バレンティーノ・ロッシ選手のタイムを超えること。
その目標はとてつもない大きな、まるで壁だ。

既報「【驚き】ロボットライダー「モトボット2」対MotoGP天才ライダーはどちらが最速!? 自立して転倒しないバイク「モトロイド」、ヤマハが東京モーターショーでロボット展示」でお届けした通り、勝負の結果はロッシ選手の圧倒的な勝利となった。
とはいえ、開発者にとってはまさに冒頭のモトボットの言葉の通り「トップライダーの背中が見えてきた」そんな思いの結果だったにちがいない。
■動画 MOTOBOT Episode 3: Racing the Clock 挑戦
どうやってモトボットはサーキットを走行できるのだろうか?
どのような技術が使われているのだろうか?
今後はどのように進化していくのか?
モトボットの開発に携わっているヤマハ発動機の Keiji Nishimura氏に話を聞いた。
モトボットは人間用のオートバイを駆る
編集部
このオートバイはモトボット用に開発されたものですか? 初期のバージョンは補助輪を付けていたと記憶していますが。
Nishimura(敬称略)
オートバイは人間用のもので、モトボット用にいっさい改造はしていません。タイム計測はモトボットとロッシ選手が、同じオートバイに乗って行われました。
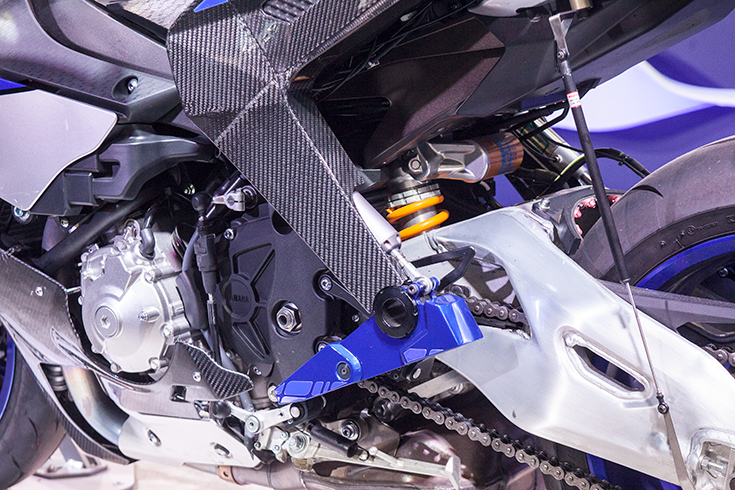
たしかに初期のバージョンでは補助輪を付けた構造でした。しかし、補助輪があるとリーン角度(倒し込みの角度)が稼げないため、今回のVer.2では格納式のスタンドを搭載して補助輪をなくして走行しています。

編集部
人間用のオートバイそのままということは、モトボットはアクセルやブレーキ、ギアチェンジや重心移動など人間とまったく同じ動きやバランス制御でライディングを実現しているわけですね。ちなみに、モトボットとロッシ選手では、リーン角度にどのくらいの差があるのですか?


Nishimura
モトボットも最大で40〜45度くらいの角度でコーナリングしていますが、ロッシ選手は50度くらいのリーン角度でライディングしています。50度はこのオートバイのリミットだと思います。
モトボットの自由度、カメラとセンサーは?
編集部
モトボットはいくつのアクチュエータを搭載していますか?
Nishimura
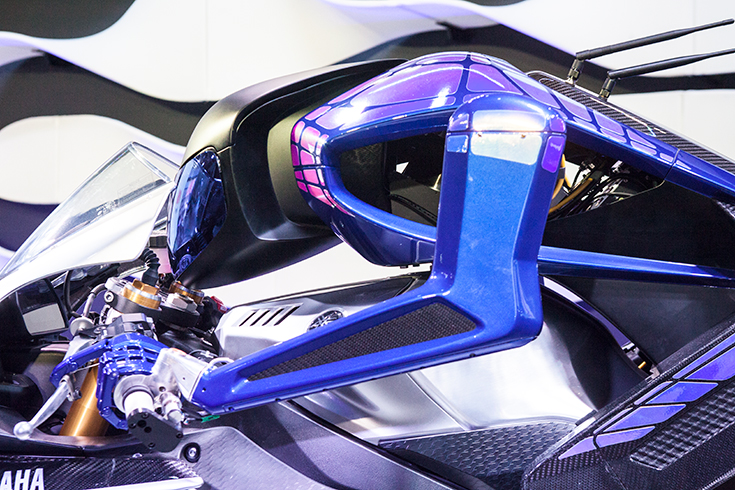
6つのアクチュエータを搭載しています。フロントとリアブレーキ、アクセル、クラッチ、シフト、ステアリングです。ステアリングのアクチュエータでバランスを取っています。
編集部
カメラとセンサーはどのような仕様のものを搭載していますか?
Nishimura
ビジョン(視覚技術)は搭載していません
編集部
え? カメラは搭載していないんですか?
Nishimura
はい。ビジョンは使ってません。車両の位置の測定と予測については高精度のGPSシステムを使っていて、その粗さを補うためにIMUを使って、cm単位で位置を割り出しています。
サーキット走行に特化する仕様なので、コース通りに正確に走行するのに必要な技術だけのシンプルな構成にしています。そのため、路面に石ころなどの障害物があっても対応はできません。
驚くことにモトボットにはカメラもLiDERも搭載していないという。モトボットはコースレイアウトに沿って、正確に走ることでタイムを削っていく。事前に走る対象のコースとして外周と内周の構成値データを入れて、それをもとに指定した走行速度で走るためのデータを与えると、モトボットはコンピュータが計算した軌跡に沿って走行するしくみだ。
編集部
そうなると、急にオートバイの前後輪が横滑りするなどしたときに、モトボットが対応するのは難しいですね
Nishimura
はい。そこまでは対応できていません。しかし、もちろんただサーキットを走るだけではなく、何度か転倒しながら現状での限界に対する挑戦は行ってきました。ステアリングがブレるくらい攻めた走りもしています。しかし、それでも人間の感性によるライディングの部分にはまだ踏み込めてはいないですね。
編集部
初代と比較して、Ver.2ではどんなところが改良され、進化したのでしょうか
Nishimura
ロボットのボディにカーボン素材を使用したり、軽量化と剛性アップをはかって大幅な改良を行いました。ソフトウェア制御は初代から引き続き、改良を重ねたバージョンに進化させています。軌跡を追従するためのコントローラ、ステアリング操作とトルクをかけてスピードを合わせに行く制御、更に自分の位置を推定する予測システムなどをブラッシュアップしています。
編集部
ディープラーニングなどのAI関連技術は使われていますか?
Nishimura
このバージョンではディープラーニングは使っていません。今後、「この場合は操舵で対応する」「この場合はアクセルで対処する」といったさまざまなパターンに対応していくにはAI技術を使った機械学習や経験が必要になるかもしれません。
編集部
ロボットは正確にラップタイムを刻むことができるのですか?
Nishimura
走るコースを正確にトレースすることができます。ただ、そうは言ってもラップタイムは1秒くらいのブレはあります。
編集部
今後、更にロッシ選手のタイムに迫るにはどんな技術が必要でしょうか。
Nishimura
ハードウェアは大きく改良しましたので、ここから先はソフトウェアのチューニングが中心となってタイムを削っていくことになるでしょう。ただ、もしかしたら今まで積み上げていたものをある程度壊すつもりで、少し立ち戻った位置から再開発を考えることも必要かもしれないと思っています。



インタビューでは驚きの連続だったが、ロボットライダーのしくみがよくわかった。
次にモトボットがサーキットを走るときは、ロッシの背中がより近く見えているかもしれない。しかし、結果はどうであれ、ここで開発された技術や知見は将来のオートバイや自動運転、ロボットの研究・開発にきっと活かされることだろう。
今後の挑戦が楽しみでならない。

【圧倒的未来感】ヤマハの自立するロボット・オートバイ「MOTOROiD」(モトロイド)が転倒しないしくみ 開発者インタビュー
【驚き】ロボットライダー「モトボット2」対MotoGP天才ライダーはどちらが最速!? 自立して転倒しないバイク「モトロイド」、ヤマハが東京モーターショーでロボット展示
自律ライディングロボット「モトボット」とV.ロッシ選手はどっちが速い!? ヤマハがモーターショーで知能化バイク「MOTOROiD」や「MOTOBOT 2」を出展!特設サイトも開設
ヤマハ発動機 東京モーターショー特設サイト



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
神崎 洋治PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

