
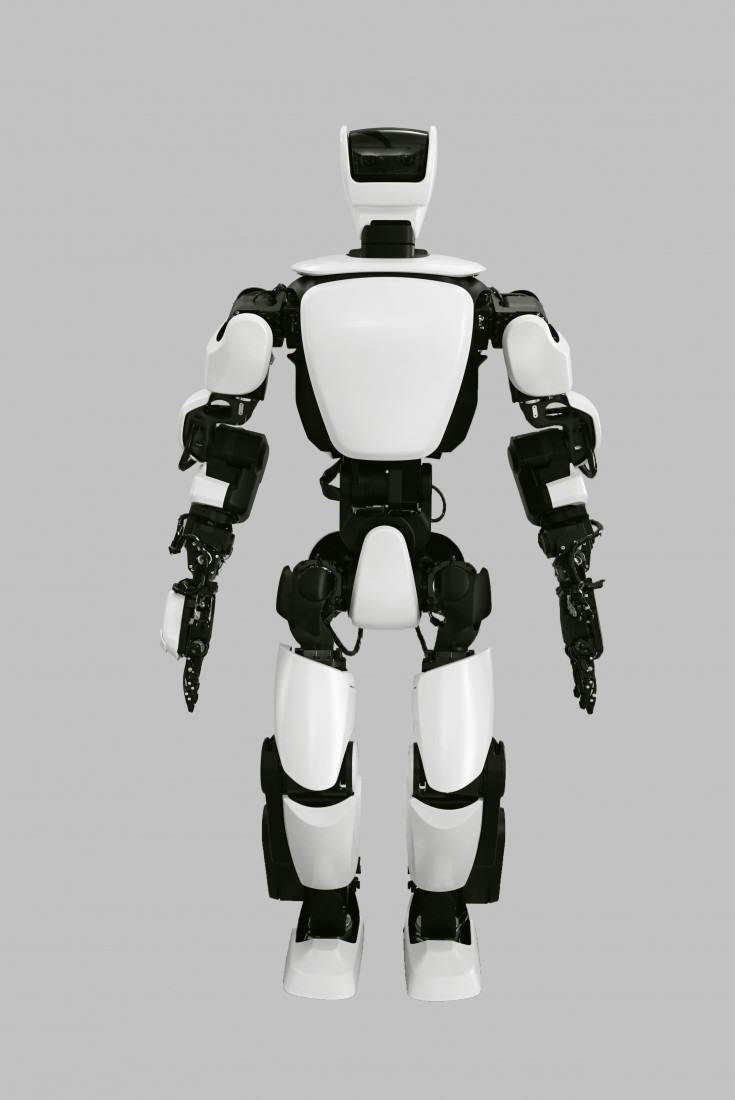
トヨタ自動車株式会社は、第3世代のヒューマノイドロボットT-HR3を公表した。トルク(力)を制御するトルクサーボモジュールと、全身を自在に操るマスター操縦システムなどにより、操縦者はT-HR3にかかる外からの力を感じながら、操縦者と同じ動きをT-HR3にさせることができる。
トヨタが過去に発表した第1、第2世代の楽器を演奏するヒューマノイドロボットは、指の動きなどプログラミングに基づく位置制御の正確さを追求してきた。今回のT-HR3は、家庭や医療機関など様々な場面で人に寄り添い、生活を安全にサポートするパートナーロボットを目指し、やさしく、しなやかな動きが可能なロボットとした。将来は、家庭や医療機関だけでなく、災害地、建設作業、宇宙などで活躍するロボットへの応用を視野に入れている。
T-HR3のコア技術であるトルクサーボモジュールは、トルクセンサー、モーターや減速機などから構成され、トヨタが多摩川精機株式会社および日本電産コパル電子株式会社と共同で開発を進めてきた。トルクサーボモジュールは、内蔵された高感度トルクセンサーによりトルクを感知し、意図したトルクを出力できるよう、モーターを制御するものである。これにより、ロボットの関節を柔軟に制御することでしなやかな動きを実現するとともに、ロボットが外から受ける力を操縦者に伝えることができる。このトルクサーボモジュールは、T-HR3の関節29か所とマスター操縦システムの16か所に配置されている。

また、このトルクサーボモジュールとマスターアーム、マスターフット、ヘッドマウントディスプレイから構成されるマスター操縦システムにより、ロボットの全身を直感的に操ることが可能となった。操縦者は、ロボットに搭載されたステレオカメラに映し出される立体映像を、ヘッドマウントディスプレイを通じてリアルタイムで確認しながら、マスターアームやマスターフットを通じて、あたかも操縦者の分身であるかのような感覚で、離れた場所からT-HR3を操縦することができる。
さらに、トルクサーボモジュールにより、周囲の人や物などに接触してもバランスを維持できる全身協調バランス制御を実現しているほか、機器同士や操縦者との接触を回避し、操縦者が安全に操作できる自己干渉回避機能も搭載している。
主な特徴
「ロボット関節の柔軟制御」
トルクサーボ技術によって、関節を柔軟に制御することで、周囲との接触によって受ける力をやわらかく受け流し、人、物などを傷つけることなく、安全・確実に作業することができる。
「全身協調バランス制御」
様々な姿勢をとる際に、周囲の人、物などとの接触によって生じる外力に対し、全身を使ってバランスを維持する。
「リアルな遠隔操縦」
マスター操縦システムにより、操縦者とロボットがトルクを共有し、操縦者の分身であるかのような感覚での操縦を実現。マスターフットは、操縦者の自然な動作からロボットの足運びや体重移動を操作できる。
パートナーロボット部長の玉置章文氏は、「トヨタはクルマだけでなく、様々なモビリティにより、『すべての人に移動の自由を』提供することを目指しており、T-HR3もこの想いに沿って開発した。パートナーロボット部は、『かしこさ』だけでなく、安心感を与えてくれるような『やさしさ』を兼ね備えたロボットを開発することに全力で取り組んでいる。T-HR3の最先端技術は、今後のパートナーロボットの発展に貢献する画期的な開発であると考えている」と述べた。
トヨタは、1980年代から産業用ロボットの開発に取り組み、自動車の生産・開発技術を応用し、屋内や屋外を問わず、人の活動をサポートし、人と共生するパートナーロボットの開発を進めている。今後も、「高齢者や障がいを持つ方々、そして医療・介護関係者を支援し、人と寄り添うロボット開発に取り組んでいく」と展望を述べている。
なお、T-HR3は、11月29日から12月2日まで東京ビッグサイトで開催される2017国際ロボット展への出展が予定されている。



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
ロボスタ編集部PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

