
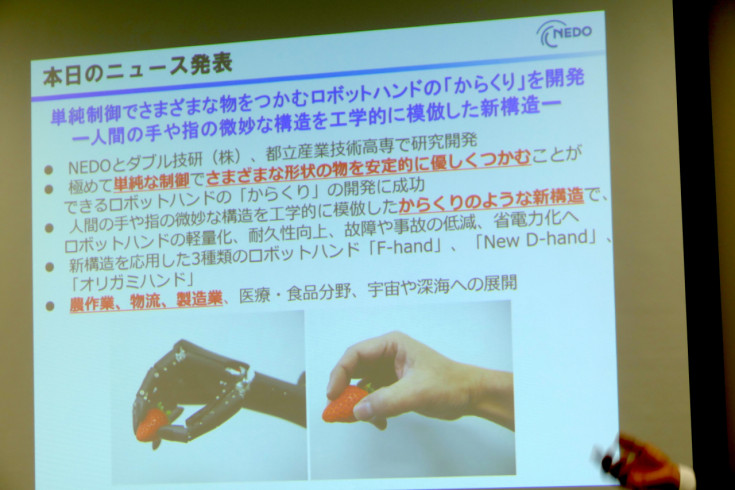
国立研究開発法人新エネルギー産業技術総合開発機構(NEDO)とダブル技研株式会社、公立大学法人首都大学東京、東京都立産業技術高等専門学校(都立産業技術高専)は、2018年1月11日、単純な制御だけで様々な形状の物体をつかむことができるロボットハンドのからくりを開発したと発表し(http://www.nedo.go.jp/news/press/AA5_100897.html)、記者会見を行った。
開発したロボットハンドは人間型5本指の「F-hand」、産業用の3本指ハンド「New D-hand」、軸受けなどを使わず紙だけで構成された「オリガミハンド」の三種類。

人の手や指の構造を工学的に模倣した新構造で、センサーやモータのような電子部品や制御の複雑さを最小限にできる。ハンドの軽量化と低コスト化、耐久性工場、故障や事故の低減、省電力化が期待できるとしている。農作業や物流、製造業のほか、医療や食品、そして宇宙や深海のような極限環境を対象とする。
NEDOが2015年度から2019年度まで推進している「次世代人工知能・ロボット中核技術開発プロジェクト」の一環として開発された。1月17日から19日まで東京ビッグサイトで開催される「第2回ロボデックス(http://www.robodex.jp)」に出展される。
協調リンクと指先なじみで簡単制御のハンドを実現
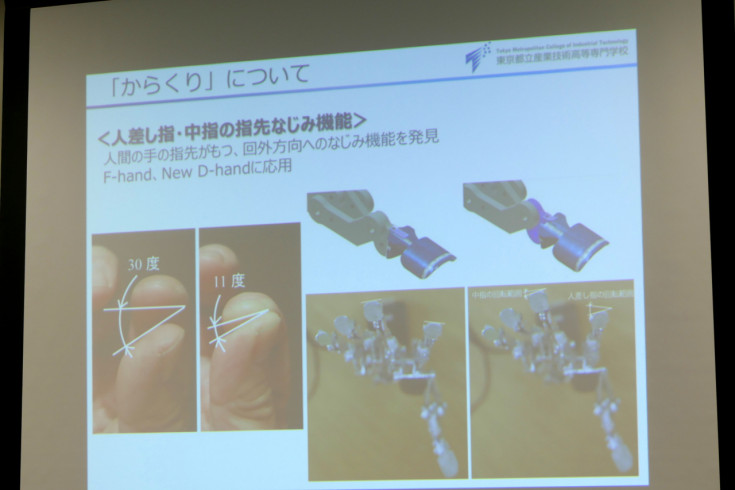
からくりは具体的には、全ての関節を機械的に結合し掌と指が連動して対象物になじむ「協調リンク機構」と、指先にねじりを持たせて力をかけることで対象物にぴったり接触させるための「指先なじみ機構」から構成されている。一つのモーターだけで、対象物が変わっても指先が巻きつくように動いて手全体で包みこみ、確実に物体をつかむことができる。

都立産業技術高専の深谷直樹准教授は、まずロボットハンドの課題を紹介。通常のロボットハンドは各関節ごとに角度や力制御を行わなければならない。今回は人の手のかたちや動きを詳細に解析し、なぜそのような動き・かたちになっているのか本質を見極めて、より人の手に近い機構を持ったからくりに置き換えた。従来のハンドよりも機構を簡略化し、人の手指に近い機構を実現した。

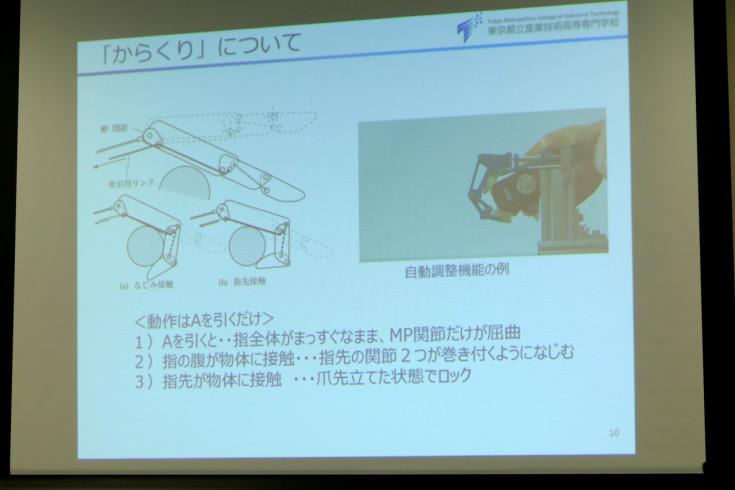
協調リンクを使うことで各指がバランスを調整し、強い衝撃を与えても力を逃すこともできる。人の手の器用さを実現することができたと深谷氏は述べた。
F-hand

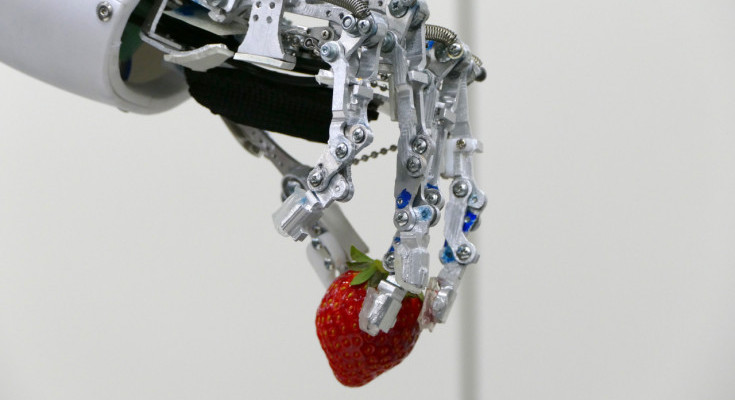
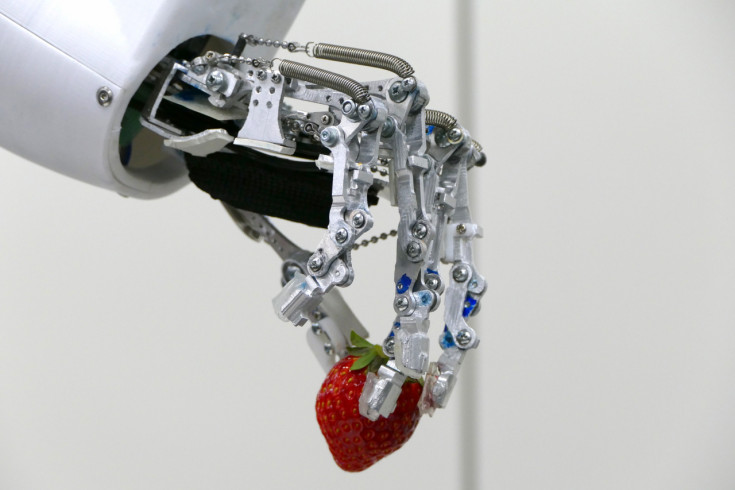
「F-hand」は共同研究先に提供することを想定した汎用試作機で、様々な作業ができる。たとえば耐熱グローブのなかに入れて作業させることもできるし、ハシゴを登るような把持力を出すことも、シュークリームのように柔らかいものやポテトチップスのような砕けやすいものを掴んだり、ドアノブを握って回すこともできる。
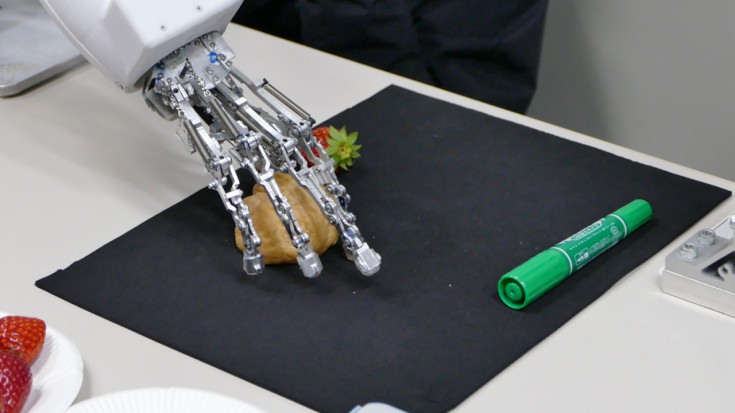
指が形状の違いや向きのズレを許容できるからくりを持っているので、たとえばコンベア上で流れてくるイチゴを次々につまむようなことも可能となるという。これをプラットフォームとしてさらに研究開発を進める。
記者会見当日はkinectを使って画像認識し、様々な物体をつまむというデモを行なった。デモではなかなか認識のズレによってうまくいっていなかったが、今後は機構もさらに改善していくとのことだ。
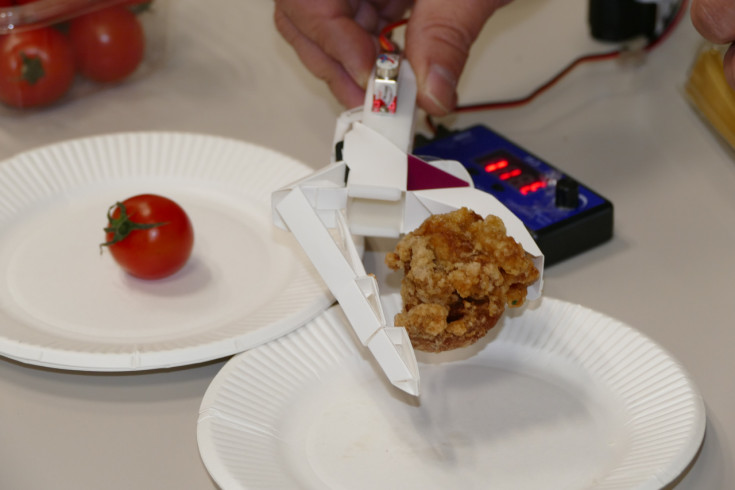
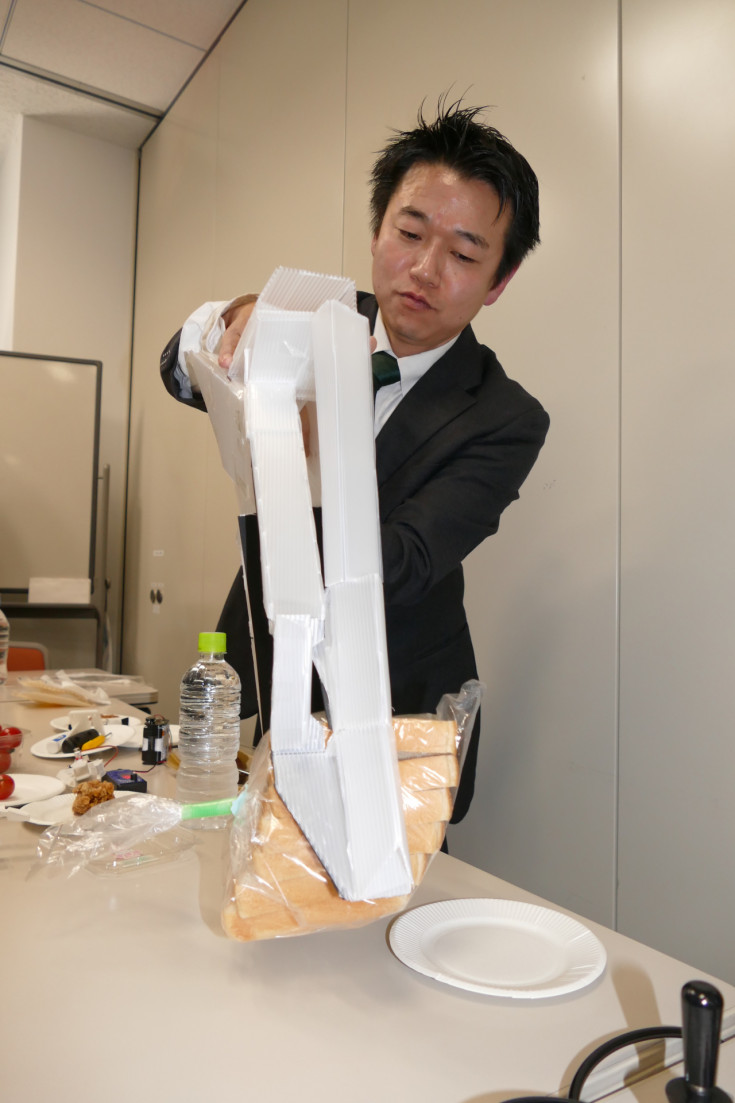
オリガミハンド
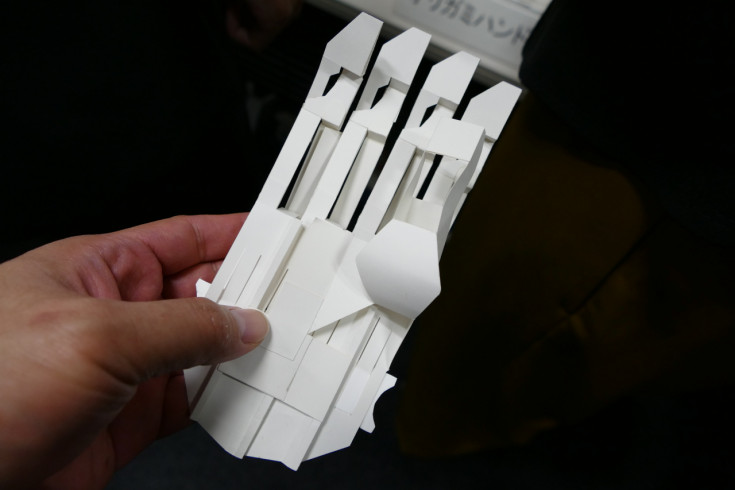
オリガミハンドは1枚のシートを折り曲げて糊付けするだけの構造になっている。簡単に試作して使い捨てできるロボットハンドだ。加工コストも製造コストも安いので、食品などの衛生分野のほか、顕微鏡下などでの微小領域や、軽量で組み立て可能であることを活かして宇宙などでの適用を考えているという。
卵焼きやサケ、コロッケ、こんにゃくのような、傷つきやすくぬるぬるしているお弁当の具のようなものも傷つけずに持つことができる。
また、紙なので簡単に大型化することもできる。軽量なのでドローンなどにも搭載可能であり、また、協調ロボットに搭載しても安全だという。
New D-hand
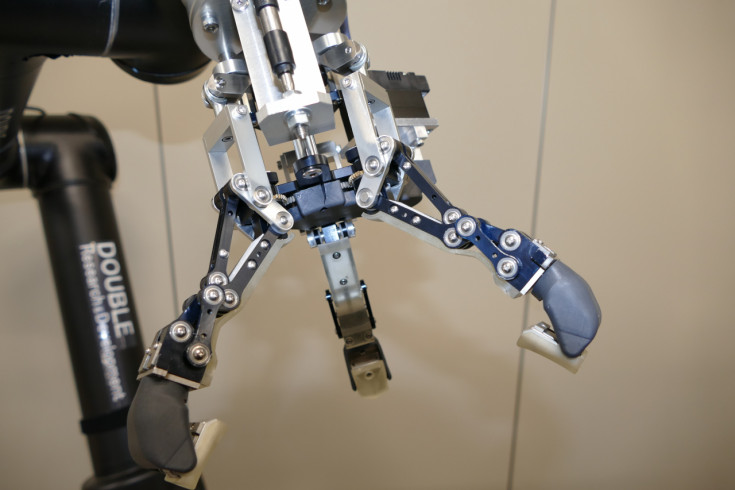
ダブル技研株式会社代表取締役の和田博氏は、対象のワーク一つ一つに対して専用ハンドを開発するのではなく、より汎用性の高い多指ハンドを事業としていると同社を紹介。

これまでの「D-hand」には二つのタイプがあったが、今回、開発した指先のなじみを入れたハンドによって二種類の掴み方ができるようになった。ハンドの導入コストを1/2以下にすることができるという。産業用途では重要な位置決め精度もコンマ以下の繰り返し精度が出ているという。
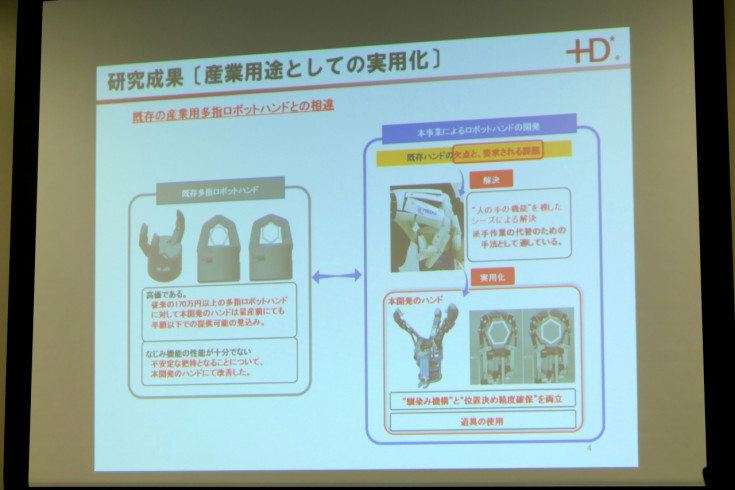
ダブル技研では既存の産業用ロボットへの適用のほか、物流センターでの仕分けへの応用、ドローンへの搭載、介護福祉など生活支援ロボットなどをターゲットとする。価格は30万円程度を想定しているという。

森山和道のロボットの見方



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
森山 和道PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

