

2018年秋に国際的なロボット競技イベントが、東京で開催される。
経済産業省(経産省)と国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)が主催する「World Robot Summit」(WRS)だ。
第1回となる本大会は2020年に愛知県(10月)と福島県(8月、インフラ・災害対応カテゴリーの一部競技)で開催予定だが、それに先駆けてプレ大会「World Robot Summit 2018」が今年10月に東京ビッグサイトで行われる。海外からも多数のチームが参加予定だ。

経産省がなぜロボットの国際大会を主催するのかは「なぜ経産省が国際的なロボット競技大会「World Robot Summit」(WRS)を開催するのか? 経産省インタビュー」の記事でお伝えしたが、今回はWRSで行われる各競技カテゴリーがどういうものか、更には見どころなども交えて紹介していこうと思う。
各競技カテゴリーはそれぞれ競技委員会の委員長がいるが、代表してサービス競技委員会 委員長の玉川大学 岡田教授に競技の解説をご協力いただいた。

ものづくりカテゴリー
WRSの競技は大きく分けて4つのカテゴリーで構成される。「ものづくり」「サービス」「インフラ・災害対応」「ジュニア」だ。
岡田(敬称略)
WRS開催には2つの目的があって、ひとつは「ロボット産業の育成」、もうひとつは「ロボットの社会実装」です。いまの社会において、 ロボットでの解決が望まれている課題を抱えている分野をピックアップして検討した結果、ものづくり、サービス、インフラ・災害の3つが選ばれました。
編集部
なるほど。それぞれ競技内容や見どころをお伺いしたいのですが、まずは「ものづくり」カテゴリーから教えてください
岡田
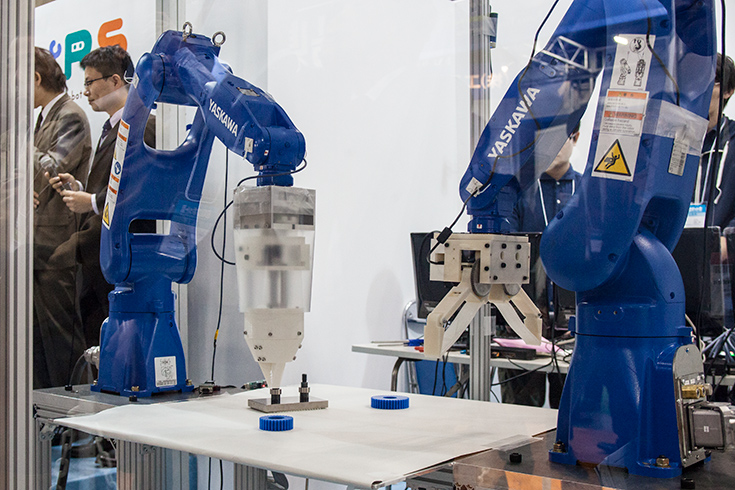
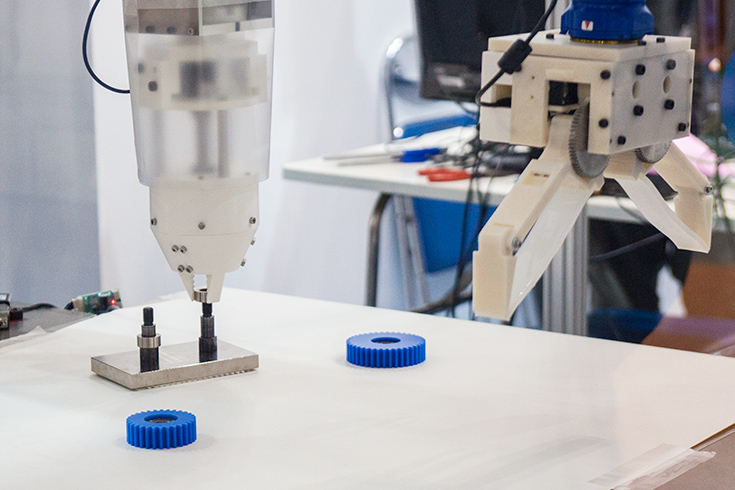
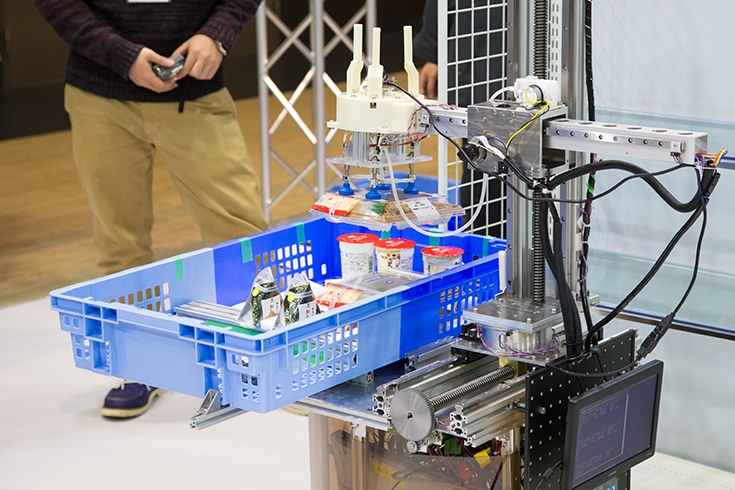
「ものづくり」はロボットアームやロボットハンドなどの産業用ロボットを使用します。製品の組立てに必要なひと揃えの部品を部品箱から取り出し、事前に部品トレイに並べておく作業をしたり、配膳された部品から製品を組み立てたりする技術を競うカテゴリーです。
産業用ロボットは人間でいうと腕の部分に相当する「ロボットアーム」と、人間でいうと手首から先の手の部分に相当する「ハンド」や「グリッパー」で構成されています。従来は、個々の部品を把持することに特化したグリッパーが使われていましたが、本競技では、専用のグリッパーを幾つかとりそろえるのではなく、様々な部品を把持できる汎用的なハンドの導入が期待されています。迅速で無駄の無い生産システムを目指しているためです。
参加チームはロボットアームからハンドまですべてを自作して参加してもOKだし、アームは市販のものを使い、ハンドだけを自作しても構いません。またカメラ等による認識技術も重要な要素になっていますので、それらの機器を含めてたトータルなシステムインテグレーション技術が競われます。
編集部
必要な技術はロボットの正確性と速さですか?
岡田
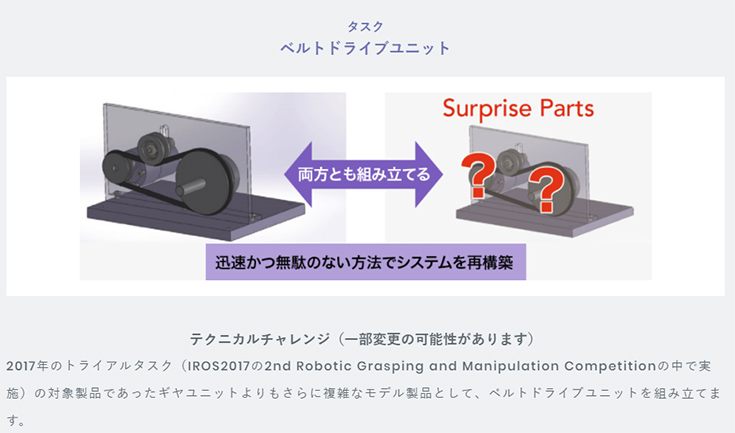
はい。生産システムですから、基本はロボットの正確性と効率性(速さ)が重要です。しかし、将来の社会実装という意味では、現状の産業ロボットでは対応が難しい変種変量生産に対応することが重要です。新たな生産要求に対して迅速、かつ無駄のない段取り替えができることです。我々は究極的には一品物の生産要求にも対応できることを目指していて、「迅速な一品ものづくりを目指して」を本競技会の目標に掲げています。
そのために、ロボットハンドやカメラを含む周辺機器のシステムインテグレーション技術が重要で、ハードウェアとソフトウェア技術の両方で各チームの技術差が出るのではないかと予想しています。観戦では、製品の組み立ての速さや正確性だけでなく、各チームがいかに迅速に新たな生産要求に対応できるかにも注目して欲しいと思います。
国際ロボット展のWRSブースでは「製品組立チャレンジ」の競技デモとしてネジやギヤを所定の位置に組み込む作業が行われていた。専用冶具などをなるべく使用しないで、いかに正確かつ迅速に組立を行えるかを競う競技だ。産業用ロボットの精度や技術において、日本のメーカーは世界的に高い評価を得ているが、本競技では変種変量生産に迅速かつ無駄なく対応できるための技術要素が加味されている。
岡田教授が指摘する「迅速かつ無駄の無い段取り替え」とは、具体的にはどのようなことを指しているのだろうか?
岡田
競技では具体的な内容が予め公表されている作業と、当日公表されるサプライズ作業があります。当日公表されるサプライズ作業は、競技直前まで何の組み立てを指示されるか解らないので、何が指定されても対応できる「汎用性」と、段取り替えも競技時間に含まれていますので「迅速性」が問われることになります。
また、「汎用性」を実現するために、様々な専用ハンドや専用冶具をとりそろえておくのは設置スペースやコストの面で問題があり、交換にも相応の時間がかかるため望ましくありません。そのため「汎用性」の中には「無駄の無さ」や「スリムさ」も求められているのです。
サービス
サービス競技は、家庭を舞台にした「パートナーロボットチャレンジ(リアルスペース)」とそれをバーチャル空間で競う「パートナーロボットチャレンジ(バーチャルスペース)」がある。
また、コンビニエンスストアの店舗を舞台にした「フューチャーコンビニエンスストアチャレンジ」がある。
岡田
WRS全般に言えることですが、「サービス」カテゴリーでも「ロボットとの協働」がテーマになっています。サービスロボットの定義はとても幅広いので、今回はまず、家庭と店舗を舞台に選びました。家庭における日々の生活で必要とされるロボットと協働する技術、店舗の業務で必要とされている技術を競うものにしようと定義したのです。
「協働」は「人とロボットが作業を助け合って行う」ことです。そこには「人がやった方がいいことは人がやる、ロボットがやった方がいいことはロボットがやる」という解釈も含んでいます。
パートナーロボットチャレンジ
編集部
「パートナーロボットチャレンジ」はどのような競技になるでしょうか
岡田
現実の生活ではまだ「ロボットと協働する」というところまでは実現できていません。家事を自動化する機器やロボットは家庭に入り始めていますが、掃除機や洗濯機など、人がしている作業を人に代わって機械が行うものが中心です。
家庭を舞台にした「パートナーロボットチャレンジ」では、高齢者などの生活をロボットが助けることをイメージし、「指定したモノをロボットが取ってきてくれるタスク」と「部屋をロボットが片付けてくれるタスク」を予定しています。ロボットは決められた機種を使用する「スタンダードプラットフォーム(標準ロボット)」制です。標準ロボットにはトヨタ自動車の「HSR」を使用します。ハードウェアは各チーム同じなので、主にソフトウェア開発で競うことになるでしょう。

また、「パートナーロボットチャレンジ」には「バーチャルスペース」という種目もあり、そちらはコンピュータ画面の中のシミュレータで競います。

編集部
「パートナーロボットチャレンジ」(リアルスペース)の標準ロボットに「HSR」を採用した理由を聞かせください
岡田
HSRは機能的にバランスよくできていて、サービスカテゴリーにピッタリのロボットだと思います。ハードウェア面では、ある程度処理能力が高い頭脳を持ち、会話もできる、モノをつかむアームや自律移動する機能もあります。また、ソフトウェア面では、ロボット業界で標準的に利用されている「ROS」(Robot Operating System)がベースになっている点を評価しました。オープンな環境で誰でも簡単にプログラミングが始められるので、ウェブ開発者の方など、多くの方々が参加しやすい環境となっています。
なお、HSR本体の制御には触れないようにしてあるので、バードウェア的なチューニングはできません。標準のモーター性能を超えて回したり、ハードウェアの仕様を逸脱するような改造はできません。

編集部
HSRは貸し出してもらえるのでしょうか?
岡田
参加が受理されたチームには、希望すればHSRが貸し出されます。トヨタとの共同研究契約を結び、開発した成果はHSR使用者のコミュニティに原則として公開されるオープンな環境で利用していただくことになります。開発環境はHSRが移動するスペースさえあれば、気軽に開発ができます。専用のGitHubもあります。
編集部
具体的にはどのようなタスクで行われますか?
岡田
「パートナーロボットチャレンジ」には「スキルチャレンジ」と「オープンチャレンジ」があります。
「スキルチャレンジ」はオペレータが口頭で「○×を取ってきて」と指示してロボットが取ってくるタスクと、ロボットが予めそれぞれのモノがどこにあったのかを記憶しておき、散らかったモノを元々あった場所に戻したり、ゴミをゴミ箱にいれて部屋を片付けるタスクです。これらは”技術”を競う比重が比較的高くなりますが、もうひとつの「オープンチャレンジ」は”アイディア”を競うものです。現実にある問題に対して、現在の技術と未来に向けたアイディアと発想で解決する提案やプレゼンテーションがポイントになります。
「スキルチャレンジ」でHSRを活かすことは大前提ですが、「オープンチャレンジ」ではアイディアだけでも高得点が得られる可能性があります。もちろんこれを両立したチームが高得点を得られるような競技を目指してルールを策定中です。

編集部
オープンチャレンジの審査員はどのような構成の方々を予定していますか?
岡田
スキルチャレンジは競技委員会のメンバーが採点しますが、オープンチャレンジの審査員は産学官から幅広い分野の方にお願いする予定です。アイディアとその実現を競うので公平な採点ができないという考えからですが、ロボット研究者や開発者だけでなく、例えば、メディア、銀行、SF作家などいろいろな分野の人が審査員になった方が幅広い視点で評価ができますよね。
フューチャーコンビニエンスストアチャレンジ
編集部
「フューチャーコンビニエンスストアチャレンジ」は店舗を舞台にしたロボット競技ですね
岡田
はい。この競技は、ロボット技術によって従業員の負担を軽減し、顧客に対して新たなサービスを提供する未来のコンビニエンスストア(コンビニ)を実現することを目的とした、世界初の競技です。セブンイレブンが協賛しています。
コンビニ店舗にはいろいろな業務がありますが、その中のいくつかに自動化のニーズがあります。それを解決するためにアイディア、ロボットの準備から開発、ソフトウェアの開発までの全般を競います。
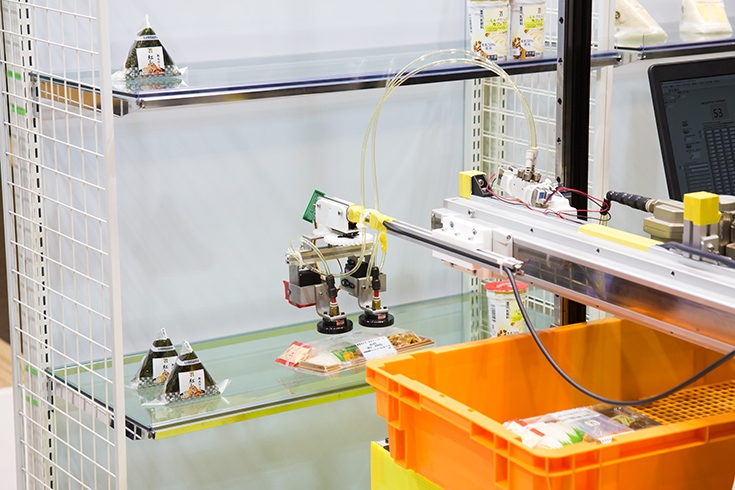
「フューチャーコンビニエンスストアチャレンジ」は既に、昨年12月にトライアル大会が仙台で開催されている。トライアル大会はオムロンのチームが圧倒的な安定度で1位となった。
具体的な競技タスクとしては次の3つで構成される。
日常商品(おにぎり、お弁当など)の自動補充、および消費期限切れ商品の廃棄を行う。
・接客タスク
ロボット技術を利用した近未来の洗練された顧客サービスの提案と実演を行う。
・トイレ清掃タスク
個室トイレの便器、床、壁の清掃を行う。
岡田
例えば「陳列/廃棄タスク」は、商品棚にオニギリやサンドイッチを並べたり、賞味期限切れの商品を判断して廃棄する競技です。ロボットが移動し、人間と同様に商品を上手に持って棚に陳列してもいいし、専用の棚を作ってきて、棚に装備したアームが商品を並べ、商品ディスプレイを行う機械を開発してきてもいいんです。アイディアで競う要素も多分にあります。
編集部
トイレ掃除タスクもロボット化のニーズは高そうですね
岡田
トイレ掃除は実際に困っている業務のひとつですが、実は「作業を定量化したい」というニーズもあります。すなわち「トイレはどこまできれいにしたらいいのか」を標準化、基準化したいということなのです。トイレ掃除が標準以下であればお客様からクレームがくるでしょうし、やり過ぎれば時間の無駄、もっと効率的にやりたいとのぞまれる・・。トイレ掃除の技術を世界に発信したいのではなく、トイレ掃除のような作業をロボットによって定量化できることの意義を発信したいと思っています。そうすることで、トイレ掃除以外でも定量化した方がいい業務があるし、それを考える機会にもなるでしょう。
インフラ・災害対応
インフラ・災害対応カテゴリーはプラント災害予防や、トンネル災害の対応といった特別困難な課題をロボット技術で乗り越えるための競技だ。災害対応のロボットの競技にはロボカップ・レスキューやDARPA Robotics Challengeが知られているが、WRSの視点はやや異なる。
岡田
災害対応やレスキュー・ロボットは、災害が起きたときに活躍するロボットとしてとても重要な存在です。重要なのは、災害が起きたときの対応だけでなく、災害が発生する前の取り組み、つまり災害予防や防災にロボットを活用することです。例えば、大きなプラントを点検するには莫大なコストがかかり、高い場所や狭い場所の点検は危険も伴います。
インフラ・災害対応カテゴリーは、「緊急災害対応」と「災害予防点検」の両面に活用できるロボットの競技です。プラントやインフラの場合、普段は日常の点検業務に使用し、災害時にはレスキューに使われる、ということが望ましい姿です。それぞれに必要とされる機能は異なりますが、それを目指した研究開発を行うことによって、安全・安心を高めることができるのです。

編集部
なるほど。プラントに普段からロボットが24時間稼働していれば、災害時に活用できる可能性が高まりますね。防災とはどのような項目ですか
岡田
例えば、施設のひび割れや配管の漏れをみつけたり、バルブを点検するなどです。故障や老朽化による災害を未然に防ぐ作業をロボット化した競技になっています。また、トンネル災害事故があったことは記憶に新しいと思いますが、このような災害時にロボットが解決できる課題に取り組みます。
ジュニア
ジュニアカテゴリーは19歳以下を対象に、人間とロボットが共生して協働する未来に貢献する若い世代を育成することを目的としている。
ジュニアカテゴリーには「スクールロボットチャレンジ」と「ホームロボットチャレンジ」がある。
「スクールロボットチャレンジ」は、ハードウェアに「Pepper」を使う競技だ。昨年夏にトライアル大会が玉川大学で開催されている。日本を含め、7ヶ国から13チームが参加した。

「ホームロボットチャレンジ」では、ロボットは各チームが用意する。ロボットの大きさによって「ミニサイズリーグ」と「リアルサイズリーグ」があるが、2018年大会では「ミニサイズリーグ」のみ開催される。
岡田
ジュニアカテゴリーは若い世代の人材育成を考え、サイエンスやロボティクスに興味を持つきっかけになって欲しいと考えています。そのため教育的な意義と、そして「楽しさ」も重視しています。参加した子どもたちも楽しいし、一生懸命に頑張っているジュニアの姿を観ているオーディエンスも楽しめる競技大会となることを期待しています。
子どもたちにとって日常活動の場は、なんといっても「学校」と「家庭」です。そのため、ジュニアカテゴリーの舞台は「スクールロボットチャレンジ」と「ホームロボットチャレンジ」で行われます。
編集部
まず、学校が舞台の「スクールロボットチャレンジ」は具体的にどのような競技内容になりますか?
岡田
「スクールロボットチャレンジ」(学校)では、子ども達の豊かな「発想とアイディア」を競うことが大切だと考えました。そのため、スタンダードプラットフォーム制を採用し、具現化するためのロボットはソフトバンクロボティクスの「Pepper」が最適だと判断しました。
「Pepper」には子ども達でも使える「コレグラフ」というプログラミングツールがあるので、子ども達は自分たちの発想とアイディア、そしてコンテンツをソフトウェア技術を通して具現化してくれるでしょう。
ソフトバンクは2020年からのプログラミング教育導入を見据えて、昨年から「Pepper社会貢献プログラム スクールチャレンジ」と銘打って、全国の小中学校に向けて「Pepper」を3年間貸し出す教育支援プログラムを実施し、全国282校に約2,000台のPepperが無償で導入されている。それに伴い、そのプログラムに参加している全国の小中学校を対象にしたプログラミング教育の成果発表会が先日開かれた。(関連記事「【速報】全国の小中学生がプログラミング学習の成果を競うPepper社会貢献「スクールチャレンジ」発表会開催!ソフトバンク」)
ここでも子ども達がPepperを活用して、身近にある課題を解決するアイディアやプログラミングの成果を見ることができた。筆者もこの活動がWRSにも繋がっていけば素晴らしいと感じている。
岡田
「スクールロボットチャレンジ」はアイディアとソフトウェア、コンテンツの制作が重要ですが、「ホームロボットチャレンジ」(家庭)はハードウェアで競う部分もあります。オープンプラットフォームで、ものをつかむ把持や移動ができるロボットによって競われます。ただ、子ども達がロボット本体を自分たちで一から開発するのは難しいので、そこはキット製品を活用したり、既存のロボットから選んで、工夫や技術を盛り込んで参加して欲しいと考えています。
編集部
競技ではどのような要素が評価されるでしょうか
岡田
ジュニア競技の場合、技術の高さや最終的な出来栄えのみで評価する一発勝負ではなく、そこまでに至るプロセスも評価したいと考えています。インタビューとプレゼンテーション、デモンストレーションで審査されますので、技術力だけでなく、発想とアイディア、どんな調査や研究をしたか、どうしてその課題を解決したいと感じたのか、システムを作るのにどんな点が苦労したか、どんなことに工夫したか、など、総合的に評価されることになります。

いよいよ具体化してきたWRS。参加申込みは3月15日まで。国際的なロボット競技大会に日本で参加できる大きなチャンスとなる。
また、それぞれのカテゴリーの意義や競技内容が明らかになってきたことで、競技大会の観戦も一層楽しみになってきた。



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
神崎 洋治PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

