


東京大学 生産技術研究所 海中観測実装工学研究センターと九州工業大学大学院 生命体工学研究科/社会ロボット具現化センターを中心とする研究グループは海中の生物を全自動でサンプリングできる自律型海中ロボット「Tuna-Sand2」を開発し、2018年3月に清水沖の自然環境下100m水深での全自動生物サンプリングに成功したと記者発表を行った。
JST CREST「海洋生物多様性および生態系の保全:再生に資する基盤技術の創出」における「センチメートル海底地形図と海底モザイク画像を基礎として生物サンプリングを行う自律型海中ロボット部隊の創出」課題の成果の一つ。


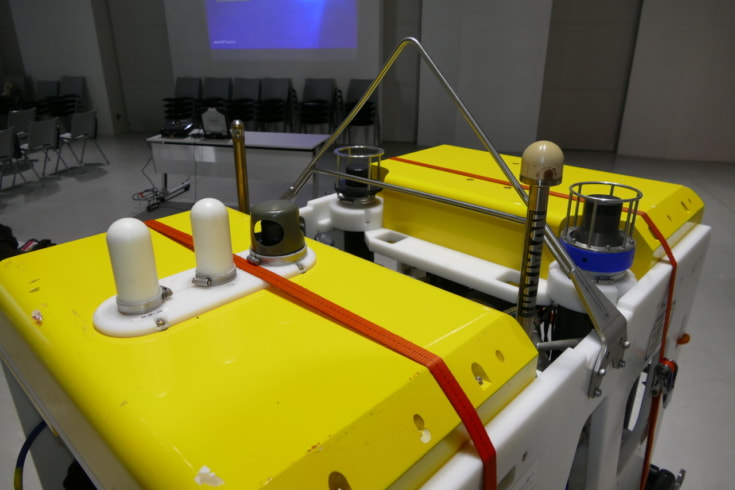
自律型海中ロボット「Tuna-Sand2」

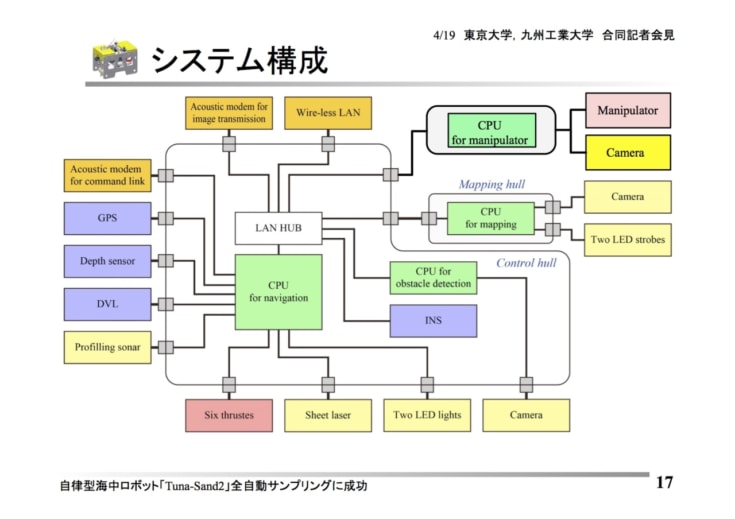
「Tuna-Sand2」は2016年2月に進水した幅1.4m×長さ1.2m ×高さ1.3mのホバリング型AUV。重量は380kg。最大速力は0.6m/s。最大深度は2000m。リチウムイオンバッテリー(5000Wh)を搭載しており、最大航続時間は8時間。水平4方向のスラスタと垂直2方向のスラスタを持つ。搭載しているセンサーはINS、DVL、深度センサ、USBL、カメラ。

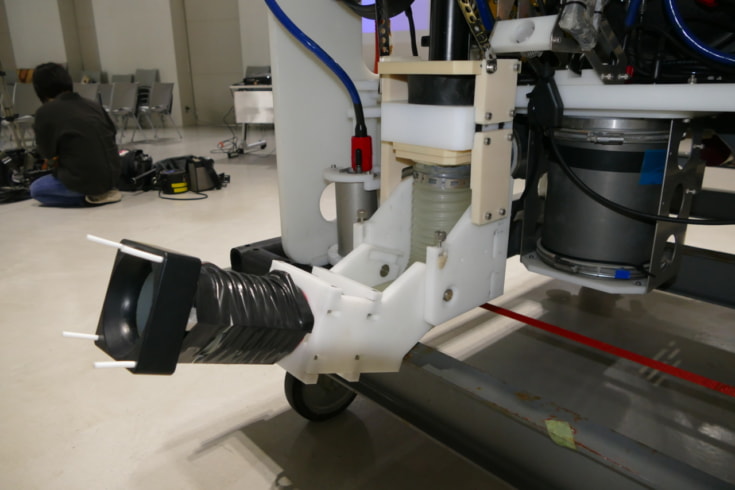
前方についている掃除機のようなサンプリング装置(スラープガン付きマニピュレータ)で直径7cm以下の生物を吸引してサンプリングする。なおサンプリング装置は当初は油圧で動かす予定だった。運用形態は現在も調整中だが、今回のサンプリングではマニピュレータは固定した状態で行なった。

生物サンプリングシステム開発担当の九州工業大学助教で東大生産研協力研究員の西田裕也氏によれば、「Tuna-Sand2」の特徴を一言でまとめると「ケーブル付きのロボット(ROV:Remotely Operatec Vehicle)のような感覚で自動サンプリングができる自律型海中ロボット(AUV:Autonomous Underwater Vehicle)」だという。
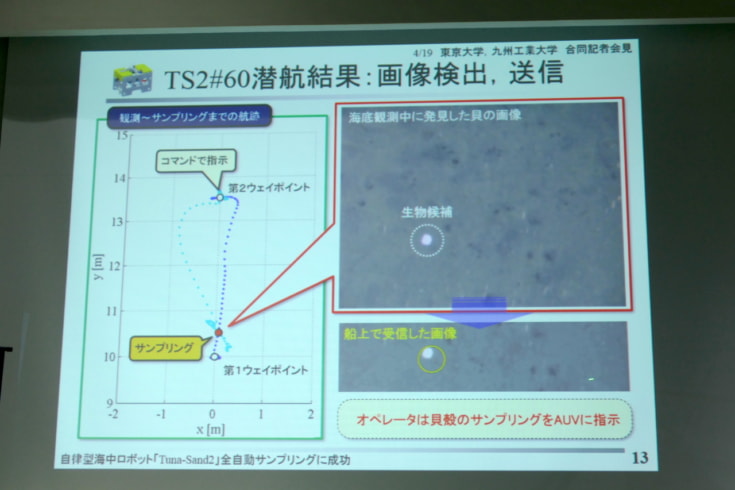
深海は通信環境が悪く、自律型海中ロボット(AUV)を使った、生物や鉱物などのサンプリングは難しいことが課題だった。「Tuna-Sand2」は5秒おきにカメラで海底を撮影。事前に与えた捕獲対象の生物種の情報をもとに、サンプリング対象と判断した生物画像を船上に音響通信で伝達する。船上の研究者が送られた画像から対象の画像を指定すると、撮影位置まで自律移動し、対象生物をサンプリングすることができた。効率的で高精度な資源調査などが行えるとしている。
人と役割分担して海中のものを自動サンプリング

九州工業大学 社会ロボット具現化センター特別教授で、東京大学 生産技術研究所 名誉教授の浦環(うら・たまき)氏は、単体ではなく複数のロボットが群で仕事をする構想を示し、「TUNA-SAND2」の意義を紹介した。「Tuna-Sand2」は狭い範囲の写真撮影を行うホバリング型。これまでのロボットでは全自動で海から意味のある物を採取することは難しかった。全自動サンプリングができるAUVは「自然科学者の悲願」だったという。
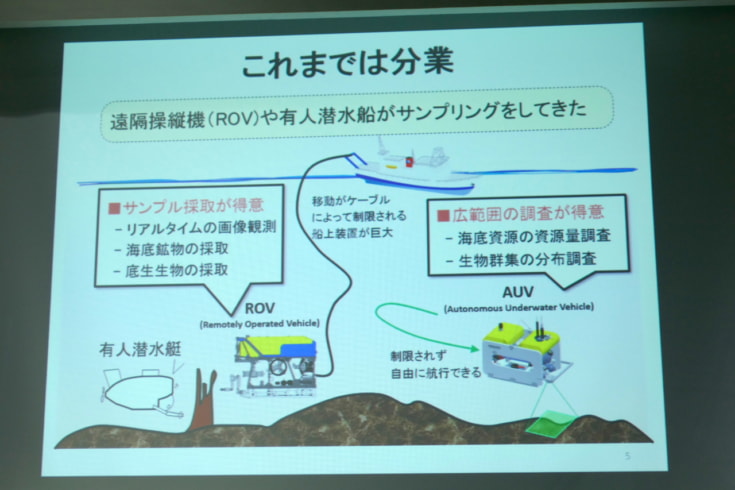
これまではサンプリングするにはROVを使うしかなかった。だがROVでは移動が数トンに及ぶケーブルで制限されるし、オペレーションにも数十トンのウインチなど大掛かりな船上装置が必要だった。いっぽうAUVは広い範囲を調査できるが、科学者の興味があるもののサンプリングはできなかった。
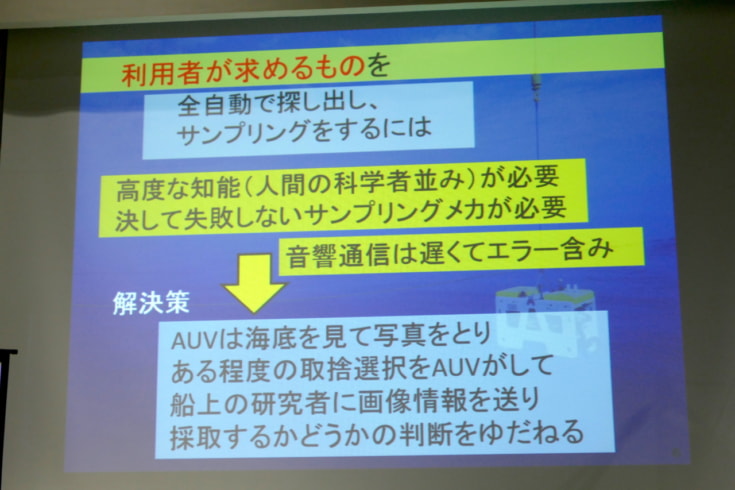
浦氏は「科学者の興味があるもののを持って来させるためには、そのための知能と、サンプリングメカの両方が必要だ」と述べた。ケーブルがないAUVは音響通信を使うしかない。だがこれはいわば「20年前のテレビ電話」のようなもので、非常に通信速度が遅い。そこで、AUVが海底の様子を撮影し、ある程度取捨選択して、船上の研究者に問い合わせて判断をゆだねるというかたちをとった。
浦氏は、ロボットが粗く取捨選択して船上の研究者が決定を下すという人とロボットの役割分担と、これまでの1号機などの海中ロボットと失敗しないサンプラーの実績に基づくものだと述べた。
小型船舶でも運用可能な自動サンプリングAUV

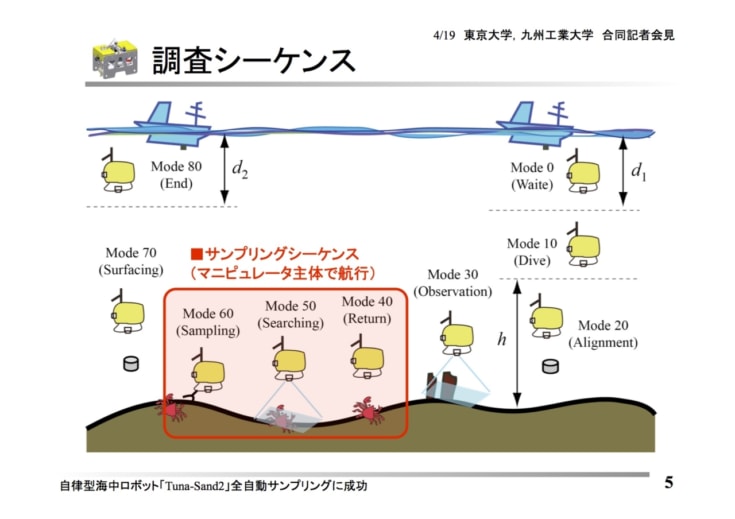
詳細は九州工業大学 若手研究者フロンティア研究アカデミー助教で、東京大学 生産技術研究所 観測実装工学研究センター協力研究員の西田祐也氏が解説した。Tuna-Sand2は海中に投入されるとバラストで沈んでいき、あらかじめ決められたルート(ウェイポイント)に沿って一定速度で移動し、海底の様子を定期的に撮影。通信速度10kbpsの音響モデムを使って適宜母船とやりとりをしながら、必要に応じてサンプリングシーケンスを実行する。一枚あたり送るのに5秒程度かかるという。
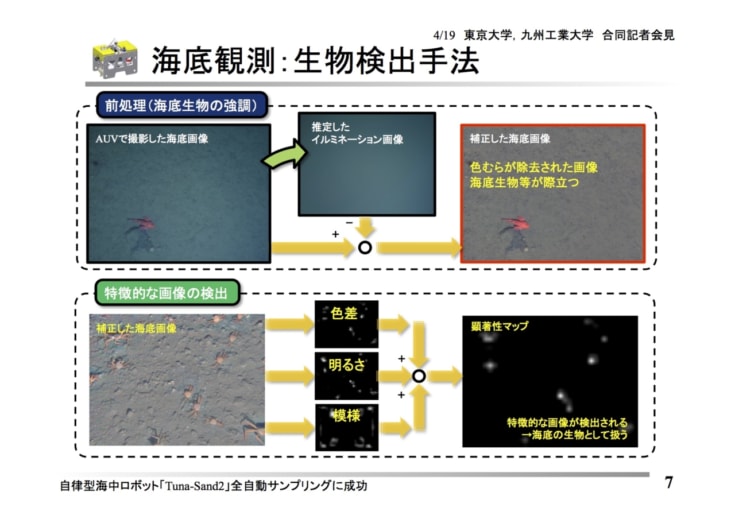
画像処理は二つのステップに別れている。まず前処理で色むらなどを除去して海底生物を強調した鮮明な画像を得る。そのあと、色差・明るさ・模様などを手掛かりに、顕著性マップを作成。特徴的な画像を海底の生物とみなして扱う。そして圧縮して船上に送る。
船上の研究者から指令を受けると、撮影した位置に戻り、撮影したときと同じ向きに回転。探索とサンプリングというフェーズに移る。カメラの中心に生物を持っていくように船をコントロールし、海底に近づき、位置調整をおこない、サンプリングする。その後、海底上1.5mまで浮上し直してシーケンスを終了する。
サンプリング試験は3月6日から10日にかけて行われた。東海大学臨海実験場を出港地、支援船は18tクラスの船「北斗」を用いた。天候のため2日しか投入できなかったが、後半の日程でサンプリングに成功した。
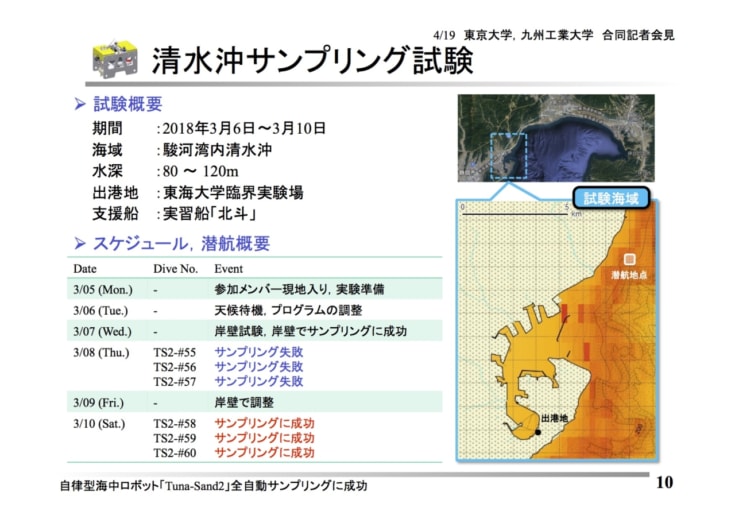
濁りや潮流などのある実海域での運用は難しかったが、10名程度しか乗らない小型の船でも、運用が可能なことを示すことができたと述べた。

浦氏は従来に比べて「非常にハンディな装置で効率良く探査ができる」と利点を強調した。次は7月末から8月中旬に、グーグルのシュミット財団の船を使って、アメリカでメタンハイドレートを含めた海底環境調査を行う予定。マッピング担当の東京大学 生産技術研究所 海中観測実装工学研究センター准教授のソーントン・ブレア氏が中心の調査となるという。西田氏は小型のカニなどのサンプリングにも挑みたいと語った。

今後については、現状では動き回る魚などをとることは難しいが、より能動的な動きをするもののサンプリングにも挑む。これまで様々な方法で海底のサンプリングが行われているが、「Tuna-Sand2」クラスのAUVを使うことで、より多くの研究者たちが、より低いコストでカジュアルにサンプリングすることが可能になる。浦氏は「AUVを使った生物サンプリングのやり方がどんどん広がっていく」と今後の展望を語った。



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
森山 和道PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

