
私たちMELTINは、人と機械を融合させるサイボーグ技術を開発しています。
サイボーグ技術によって「人間を身体の制限から解放してポテンシャルを100%発揮させる」ことを目指しています。
代表取締役CEOの粕谷氏はそう語りました。
力強さと繊細な動きを両立する手を持つアバターロボットを発表したことで注目されているベンチャー企業があります。株式会社メルティンMMIです。MMIはマン・マシン・インタフェースの略で、以下はMELTINと表記します。
同社は、2018年に全日本空輸(ANA)が発表した「ANA AVATAR ビジョン&サービスコンセプト」に参画し、体験イベント用に海中でヒオウギ貝を採取するロボットハンドの開発も発表しました。
MELTINは「サイボーグを作る」という壮大なビジョンを掲げています。アバターロボットはそのはじめの一歩に過ぎません。
同社の言うサイボーグとはどういうものか?
どのように実現していくのか、そのビジョンと技術に迫ります。
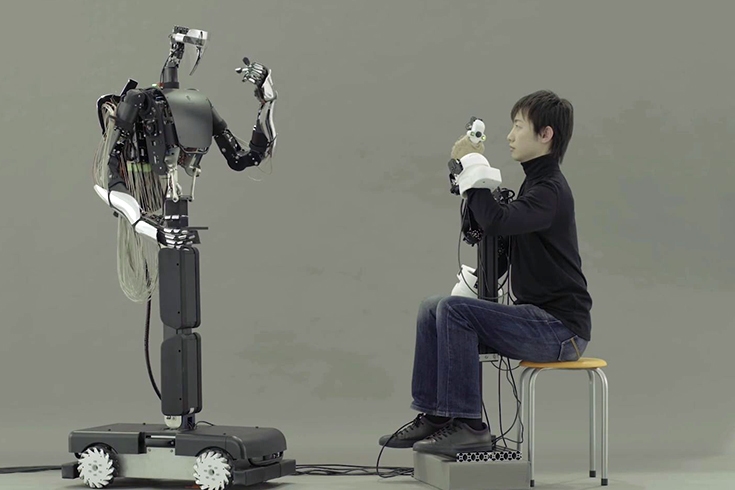
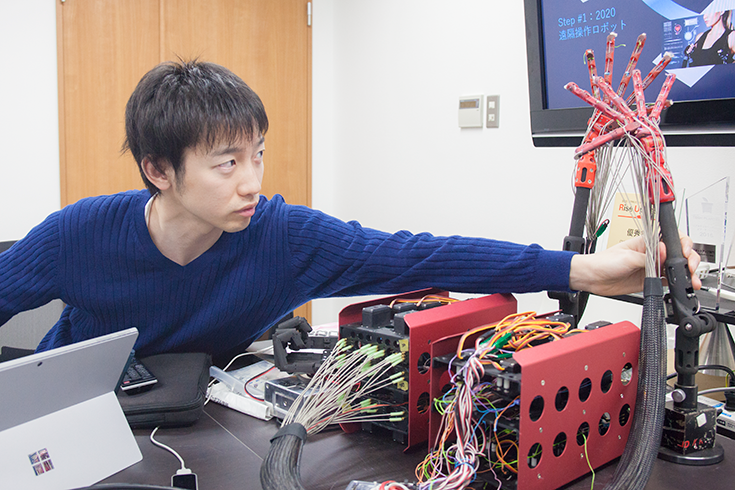
人類を物理移動から開放する遠隔操作ロボット「MELTANT-α」を発表
2018年3月、第1号機となるアバターロボットが発表されました。
名前は「MELTANT-α」(メルタント・アルファ)。遠隔から操縦できるロボットで、操縦者はVRゴーグルやグローブを装着すると、自分の分身のように操作できるものです。
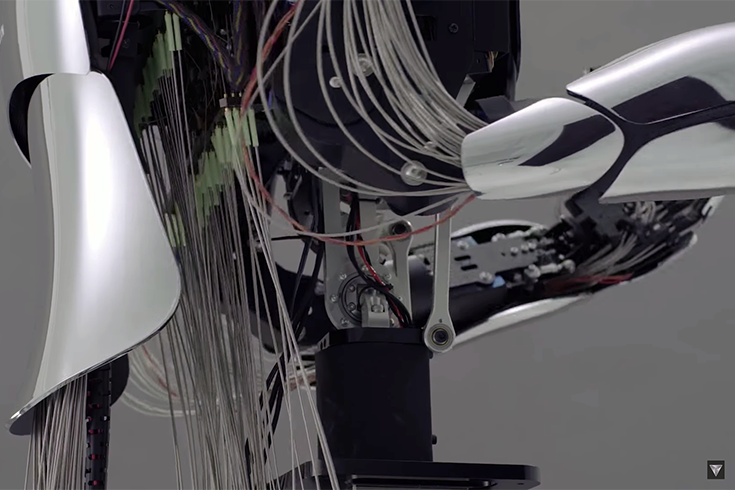
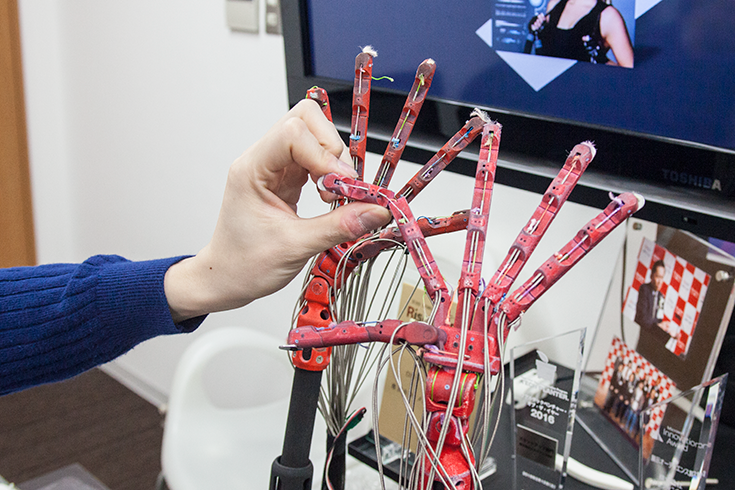
遠隔操作は「テレプレゼンス」や「テレイグジスタンス」と呼ばれます。遠隔操作ロボット自体は新しい概念ではありませんが、このアバターロボットが新しい点は、多数のワイヤーをまるで人間の筋のように束ねてロボットの腕などを駆動している技術です。
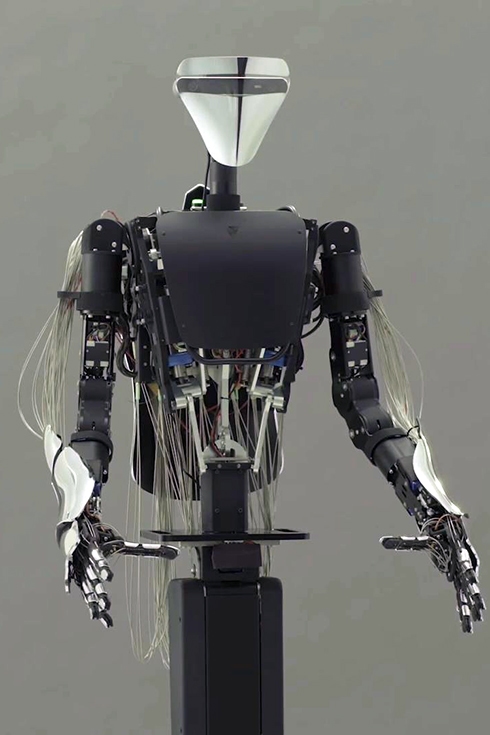
しかも、その動きは人間に近く緻密、指で言えば「どの指のどの関節から動かすか」を再現することができます。
更に遠隔操作に重要なリアルタイム性も高めています。操縦者の意図どおりに瞬時に反応する技術はとても重要です。
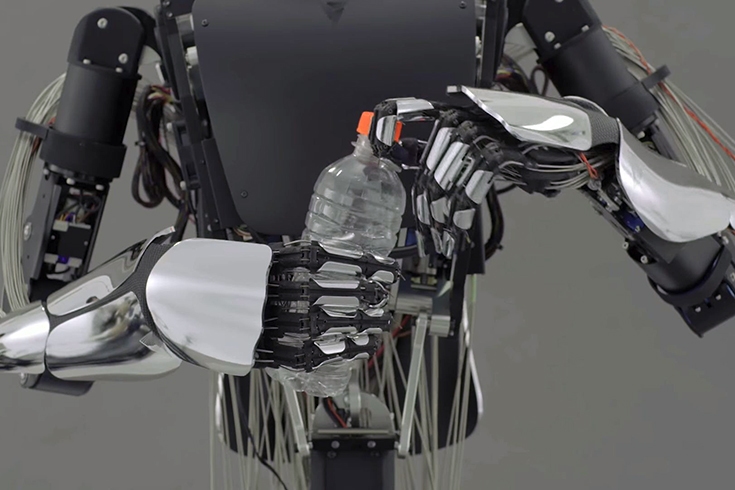
ワイヤー駆動の特性を利用して「力強さと柔らかさ」を両立しています。2Lや4Lのウォーターボトルを持ち、更にはペットボトルを開けたり、生卵を割らずに持てるという技術です。
サイボーグ技術を開発して行くにあたり、人間を構成する上で最も巧緻な部位である「手」に着目し、まずは人間と同等レベルの手を生み出すことを目標としました。身体の動作を忠実に解析する「生体信号処理技術」と、生体模倣から着想を得た「ロボット機構制御」のコア技術を使い、人間の指と同様に動かすことができる実用的なロボットハンド、及び「筋電義手」を目指して開発をおこなったのです。
サイボーグ、テレプレゼンス・ロボット、ワイヤー制御、生体信号処理、筋電義手など、多くの興味深い技術を研究開発しているMELTINのCEOの粕谷氏に話を聞きました。

サイボーグ技術によって人間が持っている制約から解放する
編集部
何を目指している企業なのでしょうか?
粕谷(敬称略)
私たちは、人と機械を融合させるサイボーグ技術を開発しています。サイボーグ技術によって「人間を身体の制限から解放してポテンシャルを100%発揮させる」ことを目指しています。
編集部
人間を身体の制限から解放してポテンシャルを100%発揮させるとは・・具体的な例を教えて頂けますか?
粕谷
はい。人間はほかの生物と比べて特別な能力をさまざま持っていますが、今までの人間の能力では適用できない部分もまた、多々あります。そこを機械が能力を拡張することで、できるようになる部分も多いと考えています。
例えば、環境への適用や対応です。人間は水の中で呼吸したり生活することができません。しかし、そんな人間であっても機械の支援を受ければ海の中で呼吸をすることができます。すなわち、能力の拡張次第では、将来は水の中で生活をすることもできるようになるかもしれません。
編集部
機能拡張のひとつとして、機械を使うことで環境に適用することがあげられるのですね。
粕谷
この例ではそうです。また、例えば事故や病気などで手の機能を失った人にとって、自分の意思で動く手を取り戻すことはとても価値のあることです。私達が開発している「筋電義手」はその願いを叶えることを目指している技術です。
生体信号制御システムや筋電義手が障がいを持つ人に希望を与える
編集部
御社の「筋電義手」は生体信号を使って動作していますね。生体信号を使うメリットを教えて頂けますか。
粕谷
人間が機械を操作するには、なんらかの身体の動きが必要です。パソコンやスマートフォンを操作するには、キーボードやマウスで入力や操作したり、画面タッチなど、手や指を使っています。生体信号で機械を操作すれば、操作方法を覚える必要もなく、自分の手足のように動かすことができます。
音声で操作するインタフェースも増えてきて、操作も簡単になってきましたが、それでも声に出すのに筋肉を使います。それはすなわち、筋肉が動く以上の速さやレスポンスで操作することはできないということです。私達が目指しているのは、もっとレスポンスが速く、リアリティの高いインタフェースです。筋肉の動きを超えた速さを追求するには「考えるだけで動く」「生体信号で動作する」ことが必要です。

編集部
なるほど。生体信号についてもう少し詳しく教えてください。
粕谷
筋電義手で用いられている生体信号は筋肉を動かすのに脳からの指令を伝える電気信号です。神経レベルでは生体信号はデジタルのフォーマットに非常に近いので、デジタルの機械の代表であるコンピュータと繋ぐことが可能なのではないか、という発想がサイボーグ技術の根底にはあります。
例えば、手を動かそうと思ったら、脳は無意識に手に対して生体信号で「動け」という指令を出しています。その指令は電気信号として身体を伝わっていきます。神経以外にもホルモンなどで通信するものもありますが、神経で伝達するものについてはコンピュータのデジタル信号に似た方法で伝達していることが解明されています。
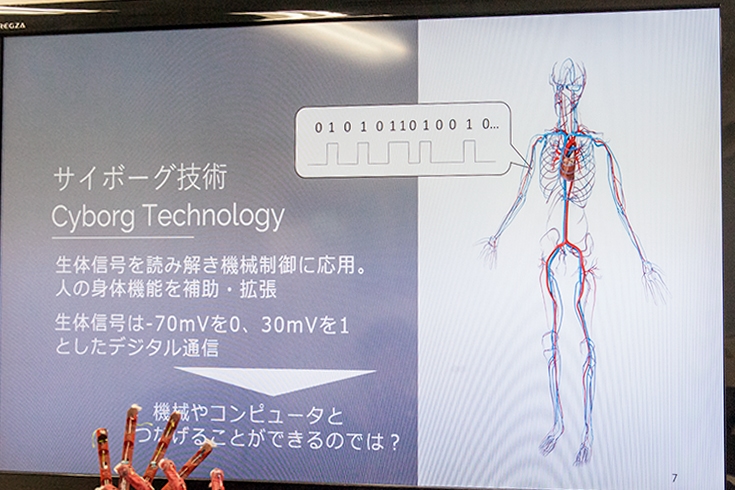
コンピュータは「0」と「1」で信号を伝達し、計算などの処理も二進数で行っていることはよく知られています。筋電義手では、身体から漏れ出す生体信号をセンサー等で取得することで、人間の意思をコンピュータが解釈して、ロボットの手を動かすという技術を実現しています。
仮に右腕を失ってしまった人が右腕のロボットアームを装着した場合、この技術を使って「右腕を動かしたい」という生体信号を読み取ることで、ほぼリアルタイムにロボットアームがそのとおりに動くということが可能になります。他社では2~3種類の動作しかわからないものが、MELTINでは10を超える種類の動作を識別することができると言います。
粕谷
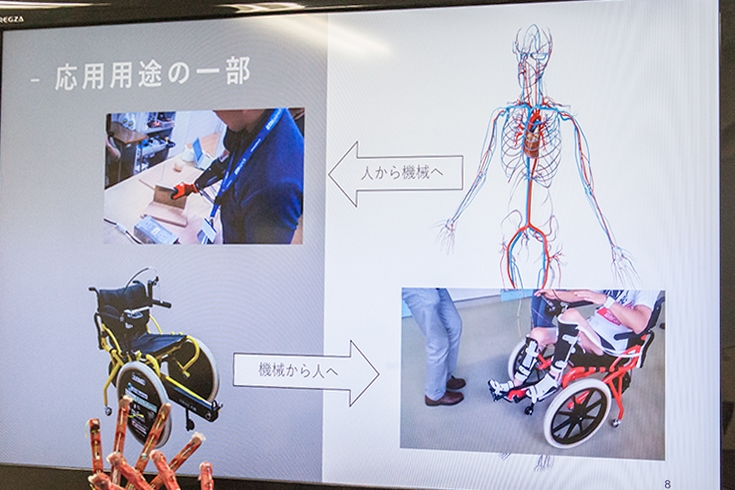
これを応用すると「人に生体信号を書き込むことで機械から体を制御する」こともできます。
例えば、下半身が完全に麻痺してしまったAさんが、自分の意思で足をぐるぐると動かして自転車のような機器のペダルを回すこともできるようにする試みです。これはどういうことかと言うと、この車いすには予め「足をぐるぐると動かしてペダルを漕ぐ」という生体信号が記憶されています。Aさんがジョイスティックを前に傾けることで、車いすからAさんの足にその生体信号が送られ、Aさんの足が制御されペダルを漕ぎます。これはもう実現できており、Aさんは足が全く動かず何年も車いすで生活していましたが、2016年にはこの技術を使って、自分の足で自転車のレースにも出場しました。
機械学習したAIで、ロボットハンドの動きを3つの筋電センサーだけで制御
編集部
自分の足で漕ぐ、というのは障がいを持つ人にとっては驚きと感動でしょうね。身体の中にはたくさんの神経や筋肉が通っているかと思いますが、どれくらいの数の信号が流れているのでしょうか
粕谷
例えば手であれば、数え方にもよりますが20~30本程度です。しかし、私達はこれらの筋肉の動きを、独自の技術によって3つのセンサーだけで識別しています。
編集部
たった3つのセンサーだけで、例えば腕や指を動かすのに必要な細かな生体信号を読み取れるということでしょうか。
粕谷
はい。研究分野では「それぞれ個別の筋に流れる生体信号が指や腕を動かすのにどう影響しているか」ということを解明しようとしていますが、私達はそれとは違うアプローチでアルゴリズムを開発しています。3つのセンサーから得られる信号をある種のパターンとしてみなして解析・活用することで、ロボットハンドの動きに繋げる技術です。それによって、処理も速く、反応がクイックになると考えています。
編集部
ひとつひとつの神経や筋肉の動きのひとつひとつをプログラミング(コーディング)して制御するのではなく、ディープラーニングで曖昧さを含めて学習させるような、そんな感じでしょうか。
粕谷
概ねはそういう感じですが、私達は生体信号に関する研究を長年行なってきて、どの信号が身体の動きに大きくどのように影響するのかを理解しています。たくさんある生体信号中の重要な部分だけに絞り込む、ある意味で変換をかけて、それをAIに学習させて、微妙で高精度な動きに実現しています。
編集部
現在、技術的に強みとしているのはやはり生体信号技術とロボット技術でしょうか。
粕谷
そうですね。生体信号技術を使って機械を動かす技術そのものは以前からあったのですが、多くは信号が出ているかどうかを読み取るだけ、というものが多かったのです。私達の研究と開発した技術によって、義手で言えばグー、チョキ、パーはもちろん、生体信号から取得し、ロボットハンド等に反映させることができるようになりました。複雑な動作でも高い精度で反映させることができるようになり、その解析時間も短時間で行えるアルゴリズムに仕上がっているために結果的に、速いレスポンスで細かく指を動かすことができるのです。
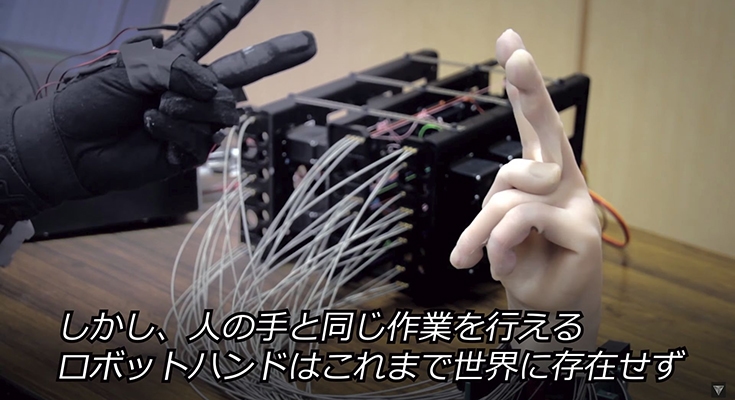
■Finger gesture
脳さえあればあらゆる行動を可能とする」サイボーグ技術
粕谷
小型軽量でパワフル、高い応答スピード、複雑な動き、そして耐久性、これらをすべて兼ね備えたロボット機構・制御技術を実現しました。これらを同時に実現しているロボットは現在は存在していませんが、それを実現するために私達は研究・開発を行ってきました。
そして、まず着手したかったのは、おそらく人の体の中で最も複雑な動きを持つ手の代替であり、実用化に最も近い世界最高性能のロボットハンド技術です。人間の手はとても進化していて、とても器用に動きます。その動きは複雑で細かく高精度な技術が要求されますが、これが制御できればサイボーグ技術にとって大きな前進になります。
先ほど例にあげた義手や車椅子などの例は社会的にとても重要です。ただ、私達は技術の通過点と考えていて、最終目標は「脳さえあればあらゆる行動を可能とする」サイボーグ技術を実現することなのです。
脳さえあればあらゆる行動を可能とするサイボーグ技術・・まるで近未来を描いたSF映画のようですが、それをどのように実現させていくつもりなのでしょうか。粕谷氏はサイボーグ技術が実現することで、社会の中で主に「3つの変化」が起きると考えています。次回は、アバター・ロボット「MELTANT-α」のデモ動作に立ち会い、この「3つの変化」を中心にインタビューを進めたいと思います。
> 続きは「サイボーグ技術が社会にもたらす「3つの変化」とは メルティン CEO インタビュー(2/2)」
MELTIN MMIでは、サイボーグの開発を行うと共に、次の世代へも繋ぐ活動を行っております。
活動内容としては、将来技術者や研究者に憧れる多感な時期の小中学生が直接触れる体験会・勉強会を開催し、サイボーグに触れて親しんで頂く予定です。その稼働を支えるためにANA(全日空)が運営する「WonderFLY」において、クラウドファンディング「リアルアバタープロジェクト」で、広くサポートをお願いしております。是非ご協力をお願い申し上げます。
> クラウドファンディング「リアルアバタープロジェクト」
■THE VISION of MELTIN
MELTIN MMI 公式ホームページ



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
神崎 洋治PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

