

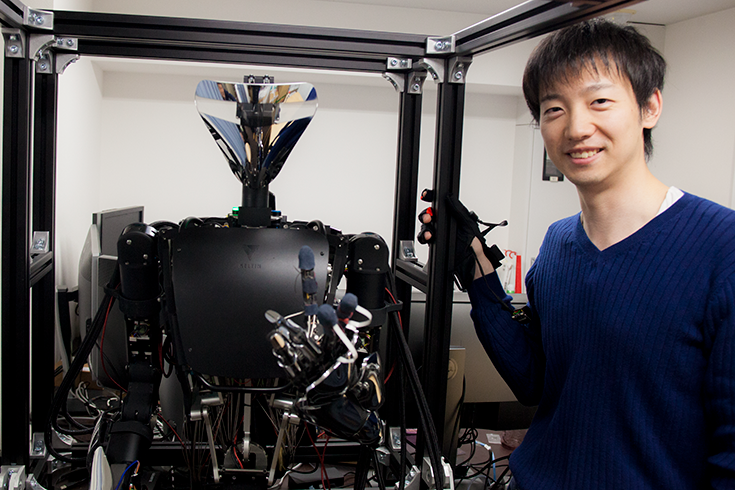
株式会社メルティン MMI(以下、MELTIN)が開発したアバター・ロボット(遠隔操作ロボット)「MELTANT-α」(メルタント・アルファ)の動作デモを見せてもらいました。
同社は、このアバター・ロボットのほか、生体信号による制御技術や筋電義手の技術も発表しています。それらはロボティクス技術だけでなく、社会的にもとても意義ある技術です。ただ、同社はそれらすら通過点と考えていて、最終目標には「脳さえあればあらゆる行動を可能とするサイボーグ技術の実現」を掲げているのです。
CEOの粕谷氏は、「サイボーグ技術が実現することで社会の中で主に3つの変化が起きる」と言います。
前回に続き、インタビューを進め、3つの変化について聞いていきます。(前回記事:「サイボーグ実現へ 人間の機能拡張を目指すメルティン CEO インタビュー(1/2)」)
MELTANT-α 起動
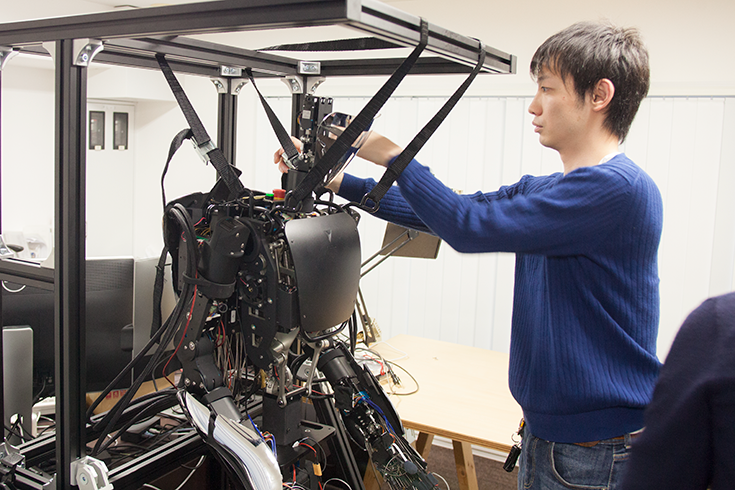
未来的な音とともに、目の前でアバター・ロボットが動き出しました。

グローブを装着した粕谷氏が指を動かすと、それに反応してアバターロボットも同じ指を動かします。本来なら、腕の装着具も装備して使用しますが、今回はセットアップの都合上、肩から腕にかけての動作は指のグローブとは別に操作していますが、動画では連動している様子がおわかり頂けると思います。腕と指の「柔らかな動き」にも注目してください。
サイボーグ技術が社会にもたらす「3つの変化」
粕谷(敬称略)
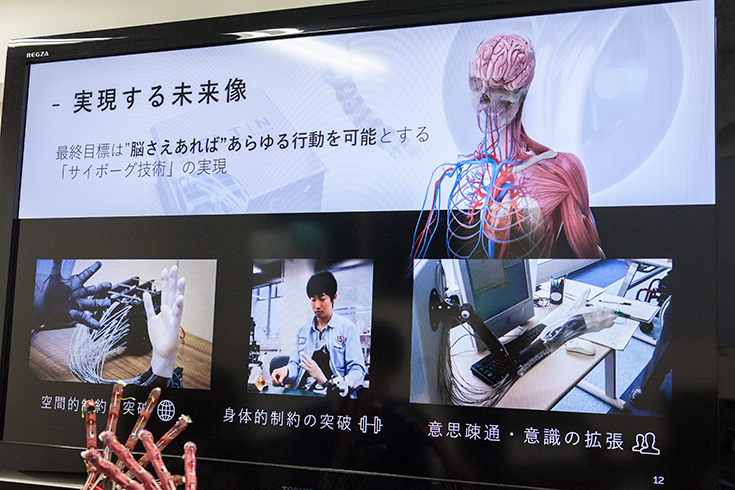
サイボーグ技術が実現することで、社会には主に「3つの変化」が起きると考えています。
それは「空間的制約の突破」「身体的制約の突破」「意思疎通・意識の拡張」です。
空間的制約の突破
編集部
空間的制約とはどのようなものでしょうか。
粕谷
「空間的制約の突破」は「MELTANT-α」で実現するテレイグジスタンス(遠隔操作)が例となるでしょう。
例えば、自分の身体機能と同じスペックの遠隔操作ロボットを作り、それをさまざまな場所に置いたとします。ユーザーはどのロボットにログインするかを指定するだけで、距離や空間的な制約を超えて、自分の意識や行動を瞬時に指定したロボットに移動することができます。
また、海の中や宇宙、危険な場所など、本人が行けない場所であっても、ロボットが行動を代替することができます。身近な例としては、災害現場で二次災害の恐れがある場所でも、遠隔操作ロボットなら入っていけて、何かの作業も自分の手のように動かすことができます。
人間の筋肉のようにワイヤーで腕や指を動かす技術は、従来のサーボ駆動とは異なるアプローチです。また、高精度な生体信号のアルゴリズムを開発して、ワイヤーを制御するロボティクス技術は、従来のロボットと比較すると、人間の腕や指の機能に近付いたと言えるかもしれません。
粕谷
実用的な例では、外科手術なども考えられます。専門医がいない地方であっても遠隔操作ロボットが高精度な指の動きを再現できるならば、都内にいる専門医が地方の遠隔操作ロボットを使って緊急的な手術を行うことが可能になるかもしれません。
また、夜間警備の現場では既に警備ロボットが導入されていますが、現状の警備ロボットの役割は見回りをするところまでで、何か異常が発生したら緊急対応の人間が呼ばれて駆けつける、というシステムになっています。制御盤などの事故が起こったとして緊急を要する場合、高精度の手を持った遠隔操作ロボットなら、通報を受けたらすぐに技術者がログインしてロボットを操作し、制御盤を操作して異常を回避したり、ブレーカーを落とすなどの対応方法を講じることができるようになるでしょう。
身体的制約の突破
粕谷
「身体的制約の突破」については、この動画を見てください。

これは私が3本目の腕、ロボットハンドを装着し、3本の腕を駆使してハンダ付けをしているところです。従来は、人間の身体的な構造や能力に合わせ、できる作業を行ってきたと思いますが、将来は自分がやりたい作業に合わせて身体機能を拡張するようになると考えています。
■Third hand experiment
編集部
3本目の腕であるロボットハンドはどのように制御しているのでしょうか?
粕谷
この時は首にセンサーを取り付けて、表情筋の生体信号を読んでいます。顔の表情や口の開閉によって、ロボットハンドを動作させています。体の様々な生体信号に対応し、ロボットの操作方法も自分好みに柔軟に組み替えることができるのがMELTINのアルゴリズムの特徴です。この実験も、筋電義手を動かすソフトウェアを全く変更せずにそのまま使用しています。将来は脳から出る生体信号を読んで制御できるようになれば、身体を動かさなくても外部デバイスを動かせるようになると考えています。
意思疎通・意識の拡張
粕谷
最終的には「意思疎通や意識の拡張」を目指しています。
人間にとってコミュニケーションの中心は会話によって自分の意思や意識を他者に伝えています。頭で考えていることを言語に置き換え、筋肉の動きに変えて、それを空気の振動によって伝えて・・という多くのプロセスを経て行っています。しかし、言語に置き換える前、脳で考えたイメージや感じた感覚をそのまま伝えることができれば、現在では考えられない速度でコミュニケーションができるようになるのではないか、と思います。
これらの3つの要素で人が持っている創造性を100%発揮できると考えています。
編集部
考えただけで意思が伝わるというのはいわゆる「テレパシーでコミュニケーションする」世界ですよね。
脳波などでコンピュータを動作させる「ブレイン・マシン・インターフェース」の研究が進んでいることは聞いていますが、その研究分野では脳波でロボットハンドを動かすことが現実的にできるという目処はすでに立っているのでしょうか。
粕谷
すでに脳波を読み取ってロボットを動かす取り組みはある程度の成果を上げています。ただ、人間のコンピュータのインタフェースとして脳波を使う技術の実用化はもう少し先の話だと考えています。
なぜ私達が脳波ではなく、筋電の生体信号と手からスタートしたかと言うと、脳波ははっきりと計測したり、動作に反映させるほど明確な解析を行うことが現在の技術ではまだ難しいのです。筋電は生体信号が取りやすく、また動きにはっきりと現れるため、アルゴリズムとして最初に作りやすかったという点があります。それでいて手は非常に複雑な動きをするため、解析のハードルは高く、これが実現できれば他の部位への転用もできると考えました。今後は筋電のアルゴリズムの技術の精度を上げることで将来のステップとして、脳の生体信号へと繋げられると考えています。
アバター・ロボットの役割と必要性、そしてビジネス展開へ
MELTINは、2019年中に遠隔操作ロボットを現場へ試験投入し、2025年には遠隔操作ロボットが人類にとって危険な環境にも踏み込めるようになっている社会を思い描きます。そして、その頃には脳や神経との接続インタフェースの開発を開始し、その10年後には脳や神経と繋がり、実空間で動く身体が完成している、という未来図です。
粕谷
私達の研究や開発した技術も実用化して、社会に役立てなければ意味がありません。現時点ではまだ「サイボーグ産業」が確立されていないので、私達は研究した技術を今ある産業のニーズに当てはめて事業化していこうと考えています。その第一弾が「ロボティクス技術」を遠隔操作ロボットに活かした「MELTANT-α」であり、この次には「生体信号技術」を活かした医療機器へと繋がります。
編集部
どのような形で提供していく予定ですか?
粕谷
ロボット側でいえば、プロダクトラインを3種類用意しています。ロボットハンド単体、ロボットハンドとアーム、ロボット全身です。
また、制御技術であれば、マスター・スレーブのマスター部分、グローブタイプのセンサー、画像認識のセンサー、生体信号センサーなどの技術を細かく提供していく予定です。
サイボーグとロボットのちがい
粕谷氏は、サイボーグを「ロボットよりもっと人間に近い存在」だと定義します。
編集部
サイボーグとロボットの具体的な違いはどのように捉えればよいでしょうか。
粕谷
人間主体のものがサイボーグ、そうでない完全に機械のものがロボットだと思っています。ハードウェアとしてはサイボーグは人とロボットの中間に位置づけられ、状況に応じて人のように柔らかくしなやかな動きと機械のような高速で正確な動きを選択できることが特徴だと考えています。
編集部
サイボーグの姿かたちは人間に似たようなものを目指すのでしょうか。
粕谷
そこは今後リサーチをしたいと思っています。皮膚を含めて人間と似ている姿が良いのか、ロボットとひと目でわかるものが良いのか、それともその中間がよいのか。
編集部
究極は人間と区別の付かないサイボーグを作りたいのですか?
粕谷
私たちは、外見的または機能的な要素に左右されない、より高度なレベルでサイボーグを定義しています。その人の創造性を最大化し、自分の思い描く形で生きることができるサイボーグ技術を追求したいのです。例えば将来、身体の一部にサイボーグ技術を導入したいというクライアントが、ロボットっぽい身体が欲しいと考えればそれを叶えたいと思うし、手を失った人が元の腕をサイボーグ技術で取り戻したいと願えば、人間の腕とそっくりなハンドに仕上げて提供したい、そう考えています。すなわち、その質問の回答としては、すべてのラインアップを揃え、どんなニーズにもMELTINなら対応できる、という言われるようにしたいと思っています。
編集部
それは粕谷さんが生きているうちに叶えられる目標なのでしょうか?
粕谷
叶えたいし、十分に叶えられると思っています。昨年の12月に資金調達し、そこから「MELTANT-α」の開発をはじめて、3月にはリリースしています。このスピード感でいけば、それを叶えることは夢ではないと感じています。
編集部
まだ解明されていない謎が壁として立ちはだかってはいませんか?
粕谷
現状で「まったくわからない」という壁はありません。当然開発なので壁は無数にありますが、その全てについて「こうやればできるだろう」という方策が存在する。1つの問題にぶつかれば10のアイデアが生まれる。その10のアイデアのうち1つを実行し、そこで問題にぶつかればまた10のアイデアが生まれる。そのため、問題に対する方策とアイデアは無数に生まれるため、それらを着実にこなしていけばゴールまでいけると確信しています。
インタビューを通しての粕谷氏との会話は実にワクワクするものでした。人間の機能を代替し、人間の機能を拡張するサイボーグ技術の研究は確実に進められています。その未来を夢を抱き、期待せずにはいられません。
※インタビューは2018年4月に実施
MELTIN MMIでは、サイボーグの開発を行うと共に、次の世代へも繋ぐ活動を行っております。
活動内容としては、将来技術者や研究者に憧れる多感な時期の小中学生が直接触れる体験会・勉強会を開催し、サイボーグに触れて親しんで頂く予定です。その稼働を支えるためにANA(全日空)が運営する「WonderFLY」において、クラウドファンディング「リアルアバタープロジェクト」で、広くサポートをお願いしております。是非ご協力をお願い申し上げます。
> クラウドファンディング「リアルアバタープロジェクト」
サイボーグ実現へ 人間の機能拡張を目指すメルティン CEO インタビュー(1/2) 驚きのサイボーグ技術!筋肉のようなワイヤー、脳の生体信号で動作
【世界初】力強さと繊細な動きを両立する手をもつアバターロボット「MELTANT-α」はペットボトルを開け、生卵を割らずに持てる
MELTIN MMI 公式ホームページ



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
神崎 洋治PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

