
米マサチューセッツ工科大学(MIT)は、開発中の四足歩行ロボット「Cheetah 3」の最新映像を公開した。「Cheetah 3」は、ボストン・ダイナミクスの「SpotMini」のようなサイズ感。見た目は「SpotMini」の方が洗練されている。
今回公開された映像には、走る・ジャンプする・ホッピングするなど複数のシーンが収められている。その様子をご紹介していく。
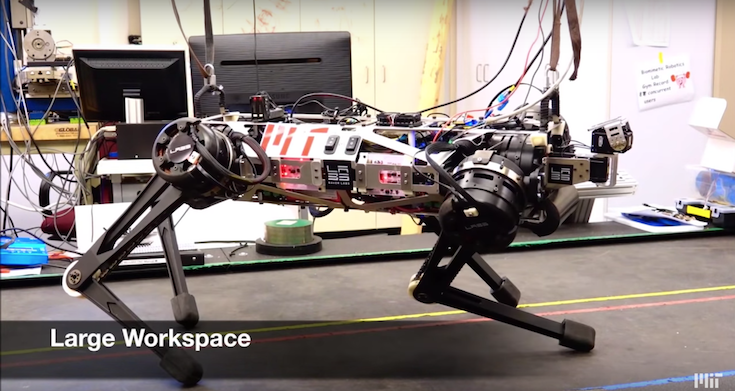
脚の付け根部分が大きく動くため、脚の角度の自由度が高い。
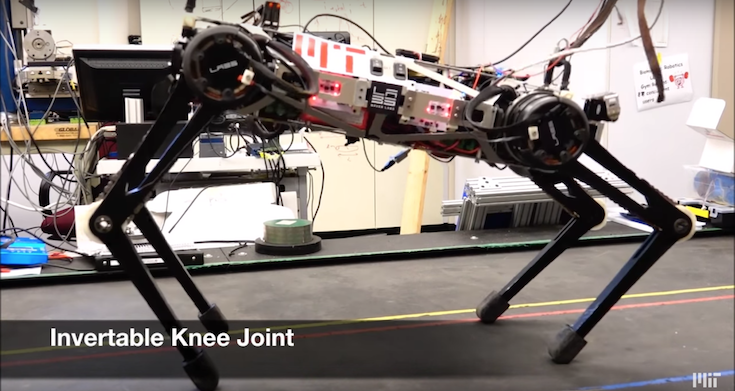
膝部分は反対方向にも曲がる。つまり、狭い場所でも旋回せずに前後に進むことができる。
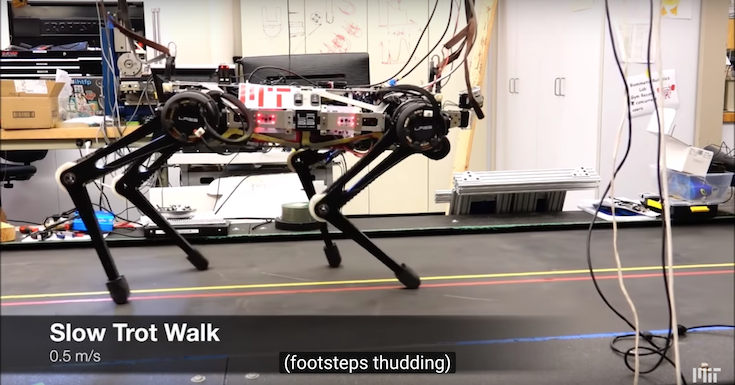
ゆっくり歩く様子と、
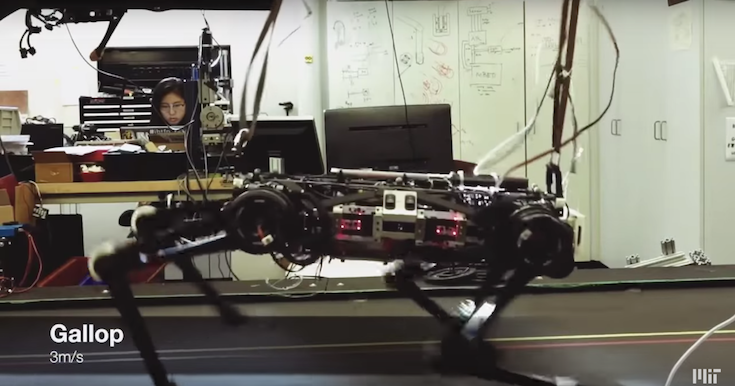
全力で走る様子も収められている。秒速3m(時速10.8km)で走ることができる。
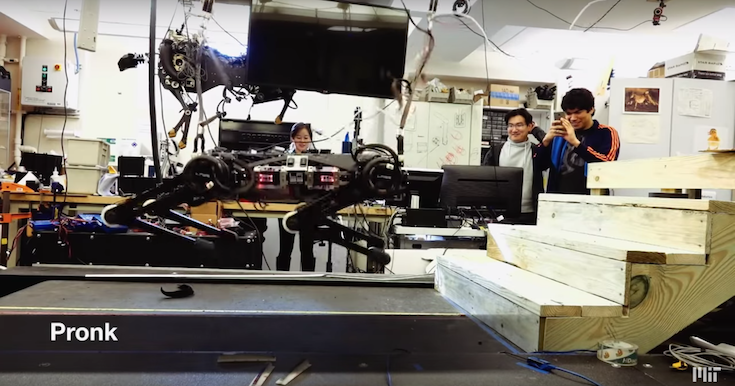
その場でホッピングするように跳び上がることもできる。
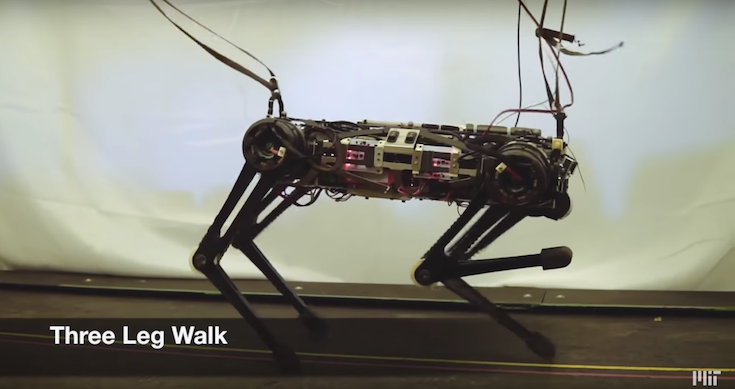
3本脚で歩くことも可能。災害現場などで予期せぬトラブルにあい、脚が1本使えなくなっても動けるということだ。

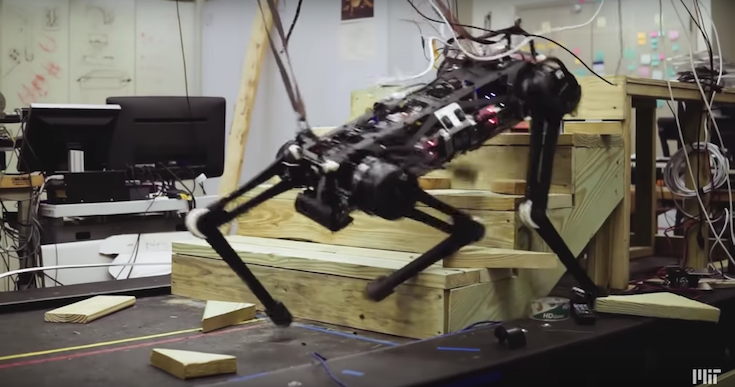
そして、カメラなし・事前情報なしで不整地の階段を登る様子も収められている。MITの発表では、視覚情報に頼りすぎると低速で動かなければいけなくなるとし、接触検出アルゴリズムやモデル予測制御アルゴリズムによって、視覚情報がない中で不整地な階段をのぼることを実現している。
階段を踏み外してもすぐに態勢を立て直す。
後ろから思い切り引っ張られても倒れずに再び階段をのぼる。

横から押されても倒れない。

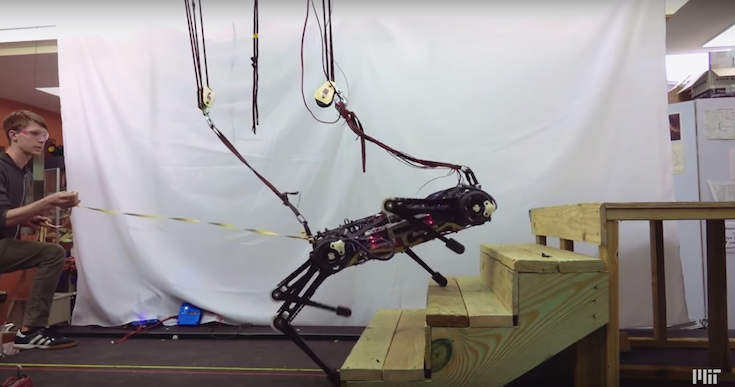
そして76cmの大ジャンプ!

着地も見事に決めている。
今回動画で示された機能を見ると、災害現場でも活躍する姿を思い浮かべることができる。暗闇の中で、不整地の場所でも移動ができ、モノがぶつかっても倒れず、脚を踏み外しても体勢を立て直して再び歩き出す。大きな段差もジャンプでのぼることができ、膝関節が前後両側に曲がることで狭い場所でも前後に移動することが可能だ。
人が入れない場所で「Cheetah 3」が活躍する。そんな未来を感じることができる映像である。



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
ロボスタ編集部PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

