

8月1日、東京の日本科学未来館において、第2回となる「ERATO 石黒共生HRIプロジェクトシンポジウム」が開催された。そこでは前日に発表された「ibuki(イブキ)」のお披露目や、「ERICA(エリカ)」の会話技術の解説とデモンストレーション、招待講演などが行われた。それに先だって、石黒教授より「石黒共生HRIプロジェクト」についての報告、基本方針や今後の展望などが語られた。(HRIはヒューマンロボットインタラクションの略)

ERATO 石黒共生HRIプロジェクトとは
ERATO(エラトー、エラート)とは、独立法人 科学技術振興機構が実施している「戦略的創造研究推進事業」のこと。Exploratory Research for Advanced Technologyの略称だ。科学技術の源流をつくり、社会・経済の変革をもたらす科学技術イノベーションの創出に貢献することを目的としている。
そして、そのひとつが大阪大学の石黒浩教授が統括する「石黒共生HRIプロジェクト」だ。「人間のように多様な情報伝達手段を用いたインタラクション技術を開発し、高齢者から子供までが社会的状況で自然に関われる自律型ロボットを実現」するとしている。
そのプロジェクトから誕生したと言えるロボットに、アンドロイド「ERICA(エリカ)」や「CommU(コミュー)」、そして7/31に記者発表された移動機能を持つ子供型アンドロイド「ibuki(イブキ)」などがある。


ロボットは理想的なインタフェース
石黒教授は講演で「これから日本の人口は半減していくと言われているが、労働力が減っても同じ生活レベルを維持していくためにはコンパニオンロボットやさまざまなサービスロボットの実用化が不可欠」「コンピュータやスマートフォンなどの研究開発において現状では欧米にイニシアチブをとられているが、ロボット分野では日本はリーダー的な存在、日本のアイデンティティなのだから頑張らなければならない」と語った。

石黒教授は、2000年くらいから人に近いロボットの研究開発をはじめ、将来的に日常生活の場で活躍する、人と関わるロボットとして「Robovie(ロボビー)」をATR知能ロボティクス研究所とともに作った。前日に記者発表したイブキはまさにロボビーの進化形。いろいろなロボットを作ってきたが、共通していることは”人間らしい”ということ。
石黒氏は人間に似たロボットを作る理由のひとつとして、「人の脳は人間を認識する機能をはじめから持っている。そのため、人間にとって理想的なインタフェースは人間であり、人間を取り巻く情報メディアとしてのロボットは少なくとも部分的には人間らしくあるべき」とした。また、「ロボットやアンドロイドは人間を理解するためのテストベット、人間に似たロボットを作ることで人間を理解していく研究の構成的アプローチ」であると解説した。
「コンパニオンロボット」の実現と「トータルチューリングテスト」
また、「ディープラーニングが技術として活用できるまでの発展をしてきたが、人間の知能に比べるとまだ表明的なものに留まっている。私自身がこれから研究に取り組みたいと思っていることは、「意図」や「欲求」を持つロボット。「意図」や「欲求」を持つロボットができると、その先に「意識」とはなにか、それを通してどう社会観が構築されていくのか、などが見えてくるのではないか」と続けた。
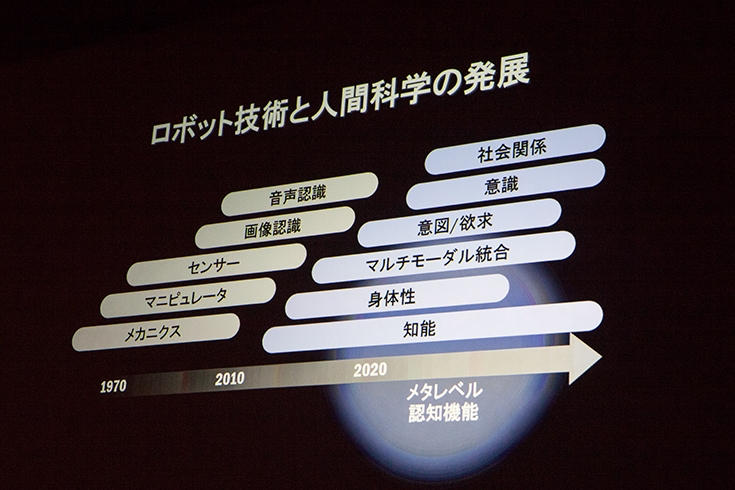
その後で提示されたロボットの進化に関するロードマップはとても興味深いものだった。
2020年以降、石黒氏はロボットの研究を通して、知能、身体性、マルチモーダル性、意図/欲求、意識、社会関係などを少しずつ明らかにしていくアプローチを描く。
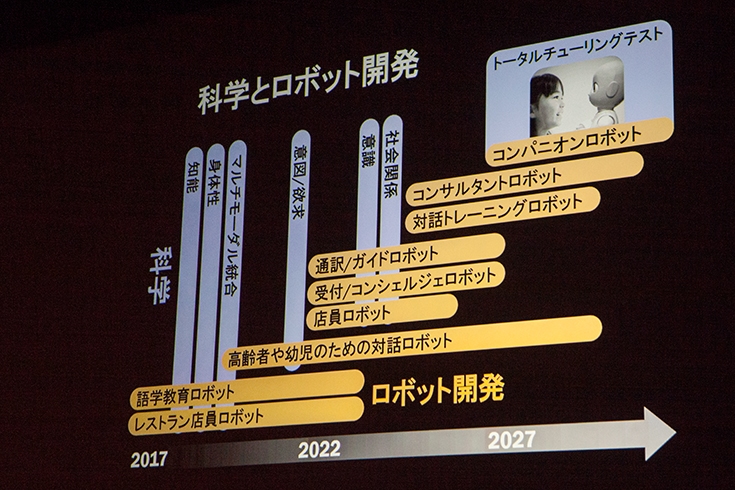
目的や用途別に、既に実現されているものも含めてロボットの項目をあげ、それを今後研究していく項目も含めた科学に合わせた図を掲示した。それによれば、「高齢者や幼児向けの対話ロボット」によって「意図/欲求」が実現され、その先に「通訳」「受付」「店員」などのロボットの研究を通じて人間と社会関係を持てるような「コンパニオンロボット」まで発展していけることを期待している、とした。
「コンパニオンロボット」の実現には「トータルチューリングテスト」が必要とした。チューリング・テストとはイギリスの数学者のアラン・チューリング氏が1950年に発表した論文の中で触れた、現在では広く知られている、いわば人工知能として認めるかどうかのテストだ。審査員が画面と文字による対話を行い、相手がコンピュータであるにも関わらず人間との区別がつかなかった場合に合格とするもの。
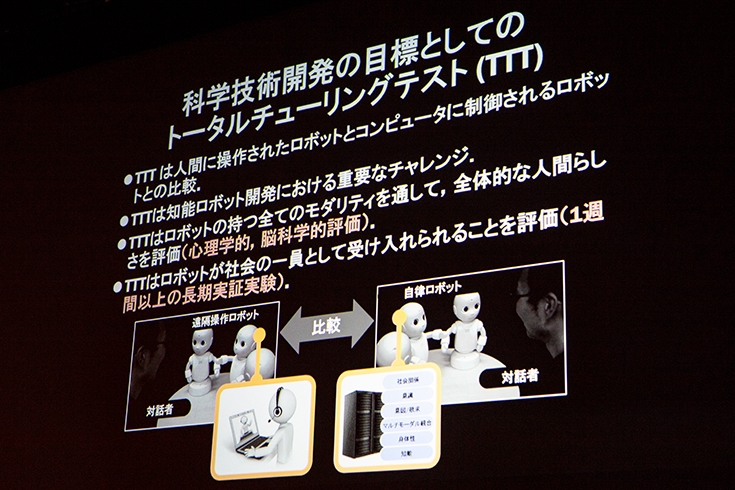
石黒氏が言う「トータルチューリングテスト」は複数のモダリティを持ったロボットが、どれほど人間らしいかのテストだと言う。「目の前で対話しているロボットが、人間によって遠隔操作されているのか、コンピュータが操作しているかが解らないレベルに達すれば、人間と同等の知能を持つ、人間に対して人間らしい社会関係が持てるロボットと言えるようになり、それが開発者にとっての大きな目標になる」と語った。
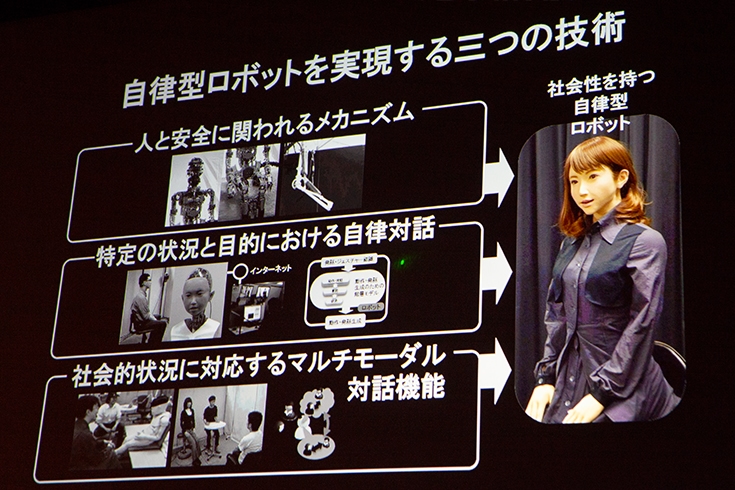
自律型ロボットを実現する3つの技術
石黒教授は「自律型ロボットを実現する3つの技術」として「人と安全に関われるメカニズム」「特定の状況と目的における自律対話」「社会的状況に対応するマルチモーダル対話機能」をあげた。
その上で「石黒共生HRIプロジェクト」が掲げる2つの研究方針を明示した。ひとつは、挑戦的な研究を含めて要素技術や基礎研究を積み上げていくこと。そして、そのもう一方で実用的な研究、実世界で対話サービスが提供できるロボットの実現も求められていること、それがふたつめだ。
「構成的アプローチ」を行うには、スマートフォンが世の中に使われてフィードバックによって更なる進化をしてきたように、ロボットが一般に多く使われるようになることが重要、とした。
石黒教授が個人的にこだわっていることとして、「(世界的に見ても)ロボットのアーキテクチュアの研究というのは、ロドニー・ブルックス博士が提唱したサブサンプション・アーキテクチュア以降はほとんど進展していない」とし、意識を感じる自律性のあるロボットを作ろうとすれば、意図や欲求をロボットにどのように実装されるべきか、新しいアーキテクチュアの研究もしていく必要を述べた。
まとめとして、「挑戦的な研究や基礎研究では、ロボットのメカニカルな制作を行うとともに自律的な対話システムや複数のロボットとの会話に関する研究にも注力していきたい。また、トータルチューリングテストをパスできるロボットやアンドロイドを実現するためにも、実用的な研究としてヒューマンロボットインタラクションの新たな技術を開発し、対話サービスを提供するロボットを実社会に提供していきたい」と語った。
移動式子供型のアンドロイド「ibuki(イブキ)」、石黒教授らが発表 アンドロイドの対話の進化も
【日本初演】アンドロイドが30名のオーケストラを指揮してオペラを歌う「Scary Beauty」レポート、オルタは深淵の指揮者なのか
ソニー、アンドロイド研究の石黒浩教授を7月招聘へ ロボット導入時の重要な洞察に期待
【石黒浩×高橋智隆】日テレのアンドロイド女子アナ「ERICA」が「ロボホン」を紹介



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
神崎 洋治PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

