

ロボットや自律マシンの未来に関心がある人たちにとって、NVIDIAのロボティクス向けAIコンピュータ「Jetson」(ジェットソン)と、開発プラットフォーム「ISAAC」(アイザック)は気になるところだろう。

新たにサンタクララに建てられたNVIDIAの本社はエンデバーと呼ばれる。
その本社の中では自律移動型デリバリーロボットのコンセプトモデル「Carter」(カーター)の実証実験が行われている。このカーター、NVIDIAの2つの中核プロジェクトである「JETSON AGX XAVIER」を搭載し、「ISAAC」を活用して開発されているコンセプトモデルだ。現実にデリバリー業務の実証実験がエンデバー内で行われている。

カーターはエンデバーの中で、スマートフォンで呼び出され、指示された場所に自律的にモノを自律的に運ぶデリバリー作業を行っている。人や障害物を避け、エレベータに乗って上下階に移動することもできる。NVIDIAはエレベータ会社と連携して、Wi-Fi通信でカーターの意思がエレベータに対して伝えられるしくみだ。

■ NVIDIA本社エンデバーで稼働する自律運搬ロボット「カーター」
(※「GTC Japan 2018」ジェンスン・フアンCEOの基調講演より)
カーターの知能化で重要なのは、自律運転と同様の技術でルートを走行するとともに障害物を検知して避け、無事に目的地に着くことだ。自動運転で最も大きな課題のひとつが、さまざまな障害物やシーンをAIに機械学習させること。その学習を高速化するのが「ISAAC」だ。
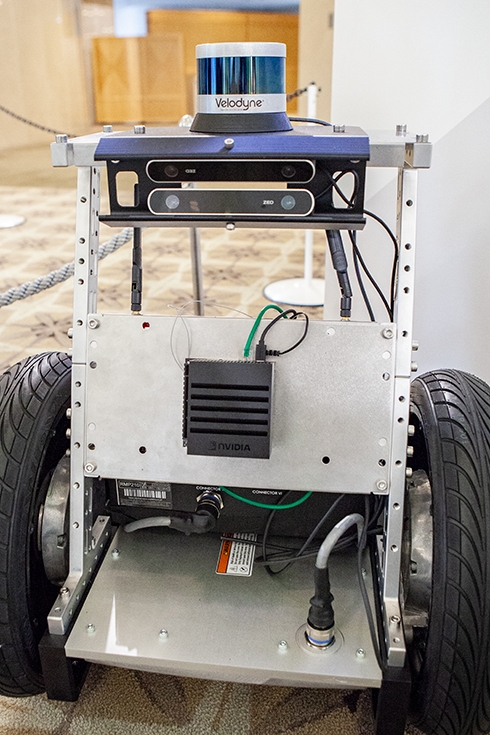
ハードウェアはセグウェイの下半身である駆動部分を流用している。知能化を担っているのは「NVIDIA Jetson AGX Xavier」(以下 Jetson Xavier)だ。Jetson Xavierは、超小型のAIコンピュータボードでロボットやドローン、エッジコンピュータなどに搭載できる。
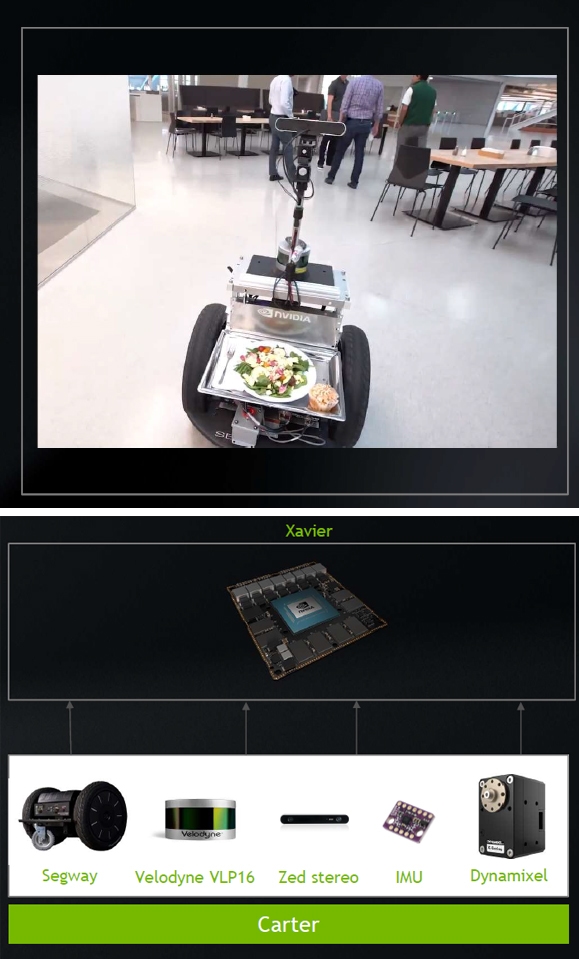
センサーとしてはベロダイン製のLiDARとゼロのステレオカメラ搭載している。IMUは位置制御、ダイナミクセルはカーターのカメラの向きをパン・チルト(向きを変える)ために使用している。
ISAACは次のバージョンでは「マニュピレーション」、ロボットアームの対応も予定されているため、カーターにもダイナミクセルでカメラ制御してアームを装備する準備が進められた。
知能化ロボティクス開発を加速するISAAC
自律型ロボティクスは運搬やモビリティだけでなく、産業用ロボット、農業、建機、検査、高齢者ケア、小売り、在庫管理など、さまざまな分野で求められている。

「GTC Japn 2018」のセッション「ISAAC Platform Deep Dive」に登壇したNVIDIAの矢戸氏は、「大胆な言い方をすれば、自動運転は周囲の車や人間が公道のルールに従って動いている中で制御するものなのなので、その視点だけでみればむしろ簡単。汎用性のあるロボットの場合は、それぞれ異なるルールのなかで利用され、かつ人と協働するという意味では桁違いに難しい課題だと言えるかもしれない。それを解決するソリューションのひとつがISAACだ」と語った。
・ロボティクスのアプリケーションを小さいビルディングブロックから素早く生成し、シームレスに適合させる
・機械学習とシミュレーションのパワーをロボティクスのアプリケーションに追加する
アプリケーションのモニタリング、ビジュアライゼーション、ロギング、返信、トレーニング、エヴァリュエーションなど、ワークフロー全般を簡易化するツール
・異なるプラットフォームや言語で、分散型ロボットアプリケーションを有効にする
・高性能、効率的、ロバスト的で、安全なコードの利用が可能
様々な機能を簡単に実現できるSDKを提供
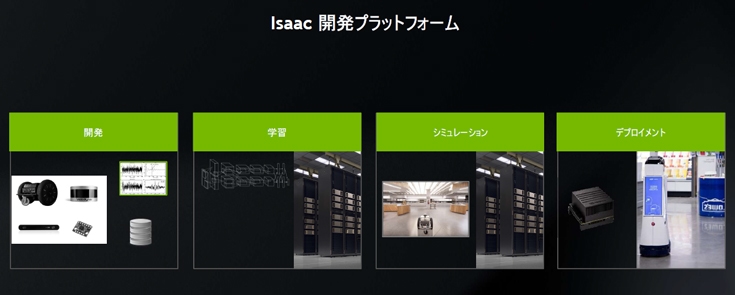
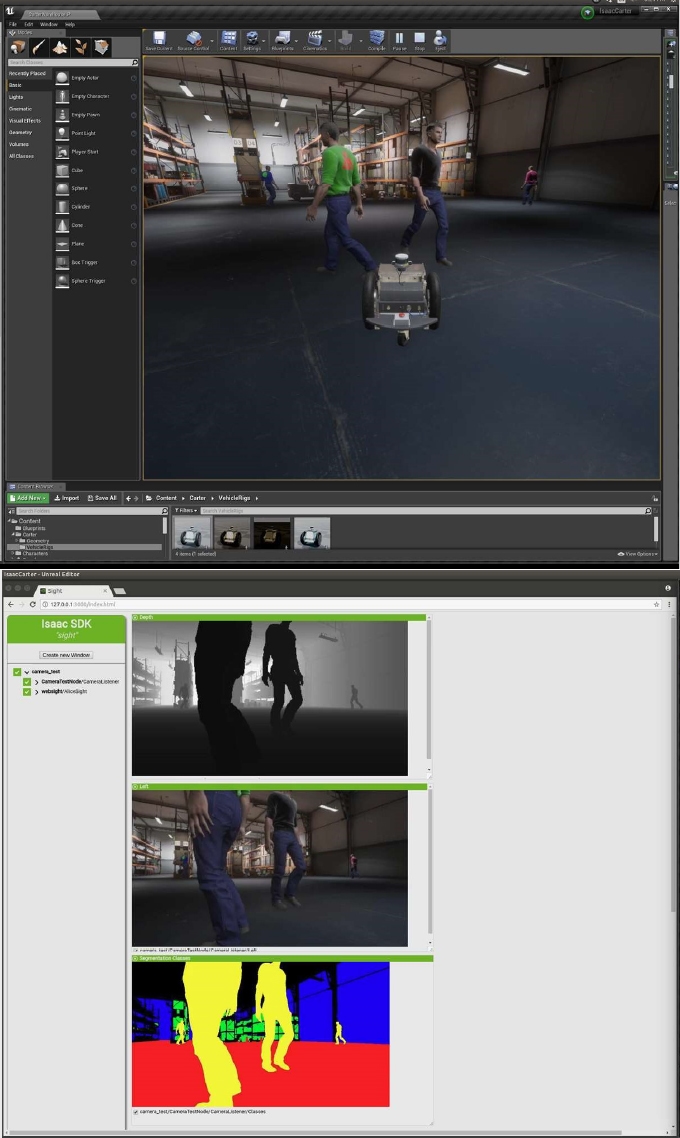
ISAACは大枠で言えば、自律型マシンに必要にライブラリ類を取りそろえたSDKが用意され、ディープラーニングなどの機械学習からトレーニング、シュミレーションとテスト、そしてデプロイなどを総合的に行うことができるプラットフォームだ。ローカル(エッジ)でもクラウドでも処理する環境に対応している。これを利用することで様々な課題の洗い出しやその対策をシュミレータやシステム上で行うことかできるため、自律型マシンの開発期間を短く、高精度に行うことを目的としている。
「ISAAC SDK」には、マッピング、自己位置推定、認識、マップエディタ、LQR パスプランナー、ビジュアルオドメトリ、経路探索、奥行き推定(測距)、物理シュミレーション、人物姿勢推定、ジェスチャー認識、人物認識、音声認識など、自律ロボット開発や移動マシン(自律モビリティ)の開発に重要となるアルゴリズムや有用なライブラリがラインアップされる。このライブラリ群をNVIDIAでは「GEMS」(ジェムズ)と呼んでいる。
特に運転支援技術からフィードバックされた技術にジェスチャー認識や唇の動きを読む技術がある。人の動きを読むことは今後のヒューマンマシンインタラクションに重要な要素となる。また、後者は読唇術のようなものだが、音声認識と組み合わせることで認識率を大幅に向上できることが期待されている。

更にISAACには標準で、ステレオDNNとオブジェクトディテクションの技術も提供される。従来のコンピュータビジョンと視差による奥行き推定の弱点を、ステレオDNNではカバーすることができ、新次元のアプローチが可能になる。また、シュミレータはステレオDNNの学習面でも役立つことが確認されていて、実際にNVIDIA内部のテストではどちらも高評価を得ている。
実機を現場に持ち込んで、実際のカメラ映像とパソコンをにらんで行う開発も重要だが、限られたリソースと時間の中では、机上のシュミレータも併用することで開発サイクルを早く回し、効率的に開発を進めることができる。ロボットの空きの順番を待っていたり、ロボットを修理する時間や手間からも解放される。実際にカーターの開発も、NVIDIA本社があるサンタクララだけでなく、トロント、ニュージャージー、インドなど、様々な場所で進められていてそれらを同時に進めることがISAACによって実現できているという。
■GTC Japan 2018で紹介されたISAACプラットフォーム(英語)
(Featured Ayuka Alyson Kozaki)
自律AIロボットや自動運転の開発を加速する「NVIDIA AGX」を多数の日本企業が導入!CEO基調講演で発表【GTC Japan 2018】
NVIDIAが医療・ヘルスケア向けの「NVIDIA Claraプラットフォーム」を発表、レガシー医療機器の能力も劇的に向上
NVIDIA 関連情報(ロボスタ)



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
神崎 洋治PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

