
比較的小型のロボットの動力として使われているのは電磁モータが主流だが「将来は次世代ゴムの人工筋肉”ソフトアクチュエータ”がその代わりになるだろう」といったら驚くだろうか。
その次世代ゴム素材「e-Rubber」(イー・ラバー)は、センサーにもアクチュエータにもなる驚きの新素材だ。昨年の「第2回 ロボデックス」で実際にロボットハンドとして展示された。そして今年の「第3回 ロボデックス」(1月16日~18日)では、触覚を再現する「ソフトマター・ハプティクス」に領域を拡げ、今まで感じたことのない新体験ができるデモを実施する。ロボスタ編集部ではいち早く、そのデモの内容を体験した。
センサーにもアクチュエータにもなる次世代超分子ゴム
豊田合成はトヨタグループの主要企業のひとつで、主に自動車関連のゴム部品などを開発・製造している、まさにゴム・樹脂などの高分子技術の専門家が集まった企業だ。昨年のロボデックスでロボットハンドを展示。それは、通電すると伸縮する次世代ゴム素材「e-Rubber」を使い、ゴムそのものが伸縮することによって動作する(動作を生み出す)マニュピレータとロボットアームだ。電動モーターなどに比べて滑らかで柔らかい動きをしつつ、モノをガッチリとつかむことができる新しいマニュピレーション(ソフトアクチュエータ)の登場に、多くのロボスタ読者の注目を集めた。

そして、今年の「第3回 ロボデックス」では、更に進化を遂げた「e-Rubber」人工筋肉(マニュピレータ)だけでなく、「触覚・圧力センサやモーションセンサ」(ソフトセンサ)を活かして「ハプティクス」や「医療」の領域にも踏み込んだものがデモ展示される。

1.ロボティクス / ソフトロボティクス
コンビニ品出しロボット: おにぎりやサンドイッチなど柔らかい商品を棚に陳列
おでんロボット: 殻付き卵と殻なし(茹で)卵を「触覚」で選別
2.ハプティクス
触覚共有技術:表面の凹凸や硬い/柔らかいなどの触感を、e-Rubber を用いて離れた場所で再現 (慶應義塾大学と共同開発中)
3.医療シミュレータ
SupeR BEAT:心臓の動作を再現する手術訓練シミュレータ(2019 年秋の販売開始)
次世代ゴムのロボット/ハプティクス活用
次世代ゴムを人工筋肉(ソフトアクチュエータ)や「触覚・圧力センサやモーションセンサ」(ソフトセンサ)に活用した場合、どのような特徴があるのだろうか。実用化されれば、電磁モーターに比べて軽量、無音(動作音がしない)、柔軟性(やさしく動く)、発熱しない、省エネなど、様々な特徴によるメリットが期待できる。
・軽量 (人体の一部に感じるぐらいに軽い)
・無音 (音がせず動く)
・応答性(速やかに動く)
・変位量 (大きく変位 ※圧電素子比)
・柔軟性 (優しい動き)
・省エネ (発熱もしない)
そして、なにより興味深い特徴のひとつは、「e-Rubber」自体が触覚としてセンシングするためのデバイス、センサーにもなることだ。
新世代ゴムがハプティクス(触覚)の領域に挑む
今年のロボデックスでは、更に進化したロボットハンドが展示される。例えば、コンビニ品出しロボット。おにぎりやサンドイッチなど、柔らかい商品をe-Rubberで検知して棚に陳列するソフトハンドは必見だ。そして、更に「ハプティクス」領域に「e-Rubber」を活用する事例も展示される。今回の記事ではハプティクスにフォーカスしたい。
「ハプティクス」とは振動や触覚を伝える技術で、皮膚感覚フィードバックや触覚技術とも呼ばれる。「触覚」は人間の生活においても、視覚、聴覚と並んで、とても重要な役割を持つ感覚だ。振動を感じたり、硬い、やわらかい、ツルツル、ザラザラ、なめらかなど、様々な触覚を伝達、共有、再現するのに「e-Rubber」は最適だと言う。
ゴムが触覚を伝えるデモの概要とそのしくみ
ゴムが触覚を伝えるというのはどういうことか。
編集部で事前に体験させてもらった。デモの内容はふたつ。
■ 遠隔から脈動を感じるデモ
ひとつは脈拍を遠隔地から感じるデモ。シンプルだが遠隔診療などで実際にニーズがありそうだ。
まず、脈拍を測りたい人がセンサーが付いた指サックを付けて自分の手首の位置に押し当てる。

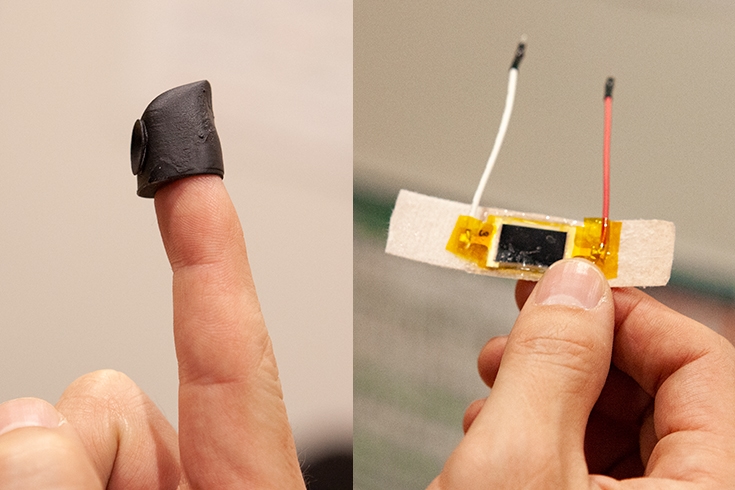
一方、指先にe-Rubberを装着した人が風船を持って待機すると、やがて脈動が伝わってくる。その伝わり方はとてもリアルで柔らかく、持っている風船がまるで心臓が脈打っているかのように感じられて生々しい。

■ 「e-Rubber」体験デモ動画1
■ 風船の中の水を感じるデモ
もうひとつのデモは2つの風船を使ったもの。技術的なしくみも簡単に説明しよう。
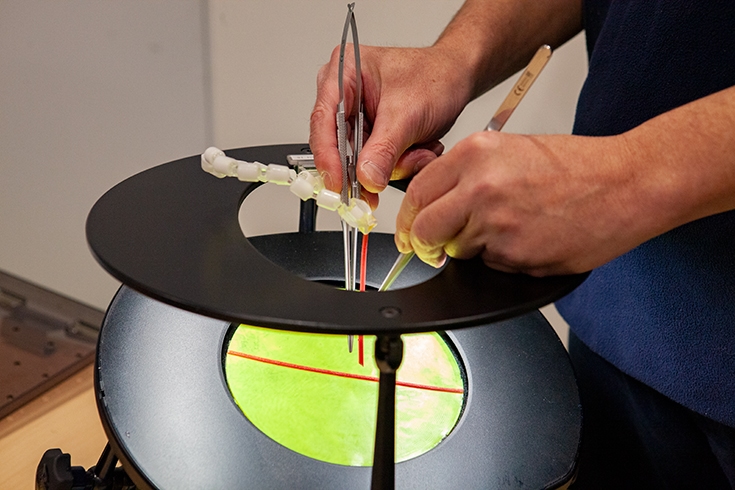
風船が2つ用意されている。緑の風船の中には水が入っているが、赤い風船には入っていない。緑の風船を揺らすと当然、中の水の動きを感じることができる。


緑の風船を持つ人は指先に指サックをはめる。指サックには低周波振動センサーが装備されている。
もうひとりはe-Rubberを指先に装着して赤い風船を持つ。e-Rubber自体が伸縮することでアクチュエータ(動力)として触覚を伝える機能を持つ。

■ 「e-Rubber」体験デモ動画2
緑の風船を揺らすと風船の中の水の動きが、指サックのセンサーが検知して触覚を電気信号で伝える。その信号を受けて赤い風船の指先のe-Rubberが伸縮することで、細かく表現された触覚としてリアルに伝わってくる。まるで赤い風船の中にも水が入っているかのような感覚を感じることができる。
e-Rubberとハプティクスを合わせた造語「:eR Hapt」(イラプト)という名称でデモンストレーションが行われる。前述のとおり、将来的には、e-Rubberをセンサーとしても利用できるようになるため、指先のセンサーもe-Rubber製になる見込みだ。今回のデモやロボットでの遠隔操作の例では、センサー側の触覚を受ける側に伝達する一方通行のものだが、お互いが装着したグローブが互いの触覚を共有し合うことができるようになる可能性も持っている。
豊田合成×慶應大 ハプティクス領域の新次元ゴム開発で連携
豊田合成はe-Rubberの開発にあたり、ハプティクス関連技術を中心に、慶應義塾大学大学院メディアデザイン研究科の南澤孝太先生のチームと連携して開発を行っている。ハプティクス関連について、今回の展示デモについてや今後の展開を豊田合成と南澤氏らに聞いた。
編集部
e-Rubberがハプティクス領域で革新的と言われている理由を教えてください
米原氏
ハプティクス領域において、ほかのデバイスにはないe-Rubberならでは優位性は「低周波」と「柔らかさ」にあります。
現時点のe-Rubberは、電動や空圧、油圧など他のアクチェータと比較すると、まだ力は弱いのが実状です。しかし、なめらかさや柔らかさを活かした活用法があるのではないかと、慶應大学の南澤先生の講演を聞きに行った際にe-Rubberを紹介させていただいたところ、「この技術を探していた」と言って頂き、ハプティクス領域でのe-Rubberの研究・開発をご一緒させていただくことになりました。

e-Rubberはゴムなので、大きな特徴として薄さがあります。南澤先生のアドバイスでその薄さを活かして、巻いたり丸めたり、比較的自由な形で活用できます。厚さや強度が必要な場合には何層にも重ねることで厚くて強いゴムを作ることもできます。現在は小さいものですが、将来はサイズも大きくして、大面積のセンサーやデバイスに拡張することができます。これらの技術をロボデックスでは紹介したいと考えています。
編集部
南澤先生は日本バーチャルリアリティ学会の理事や、リアリティメディア研究機構の理事、超人スポーツ協会理事などを兼務され、ハプティクス研究で知られていますね
南澤氏
私はVR関連、特に触覚に関する研究を10年以上してきました。VRでは、いかに見せるかの視覚とともに、いかに触れあえるかという研究が以前から行われていて、スタートアップ企業も含めてVRで触覚を実現するいろいろな研究や技術が発表されています。

中でも大きく分けて、「力」と「振動」の2つをどう再現するかが重要です。押したり持ち上げるなどの重さや、ザラザラ感などの感触を振動と力でどう表現するか、などの研究が行われてきました。それに加えて、今まで表現が難しかったのが「柔らかさ」です。硬いモノを持つ、硬いモノで押されるなどの感覚は再現しやすいのに対して、柔らかい感触を生々しく再現するのは難しく、ほとんどできなかったのです。その理由はデバイス自体が硬いためです。人や動物など、柔らかくて温かいものに触れることを再現するとき、その柔らかさを表現するにはデバイスの素材自体が柔らかいものでなければダメなのではないか、と考えていた頃に、豊田合成さんからお話を頂いて、面白い、ぜひ一緒に研究したいと感じました。
低周波の触覚とはなにか
触覚における高周波と低周波の違いは、言葉(擬音)で表現すると「コツコツ」と「ボヨンボヨン」といったところだろう。硬いものがぶつかるコツコツという振動は、短くて大きな波(高周波でピーキー)で表される。一方、柔らかいものに触れたときの振動は、小さく緩やかな波(低周波で緩やか)で表現される。素材が柔らかく、更にはゴムの伸縮というシームレスで低周波な動きが表現できるからこそ、e-Rubberは柔らかい触覚を再現することができる。
南澤氏
触覚の周波数を説明するのは難しいのですが、例えば音の周波数との関係もあります。例えば、絹のような「サラサラ」感という感触は撫でたときの音も高いですが、触覚の音も高い高周波になります。サラサラの周波が下がるとザラザラになり、更にモコモコになりますが、擬音も人によって感じ方が異なりますので、難しいですよね(笑)。要は高周波を表現できるデバイスは今までもありましたが、e-Rubberは高周波だけでなく、低周波も両方ともにできるので画期的だと感じています。

触覚の再現では「軽くて、薄くて、柔らかい」ことはとても重要です。大きくて重たいVRゴーグルは没入感の阻害になりますが、触覚に関しては、視覚より更に装着していることを意識させないものが望ましいのです。絆創膏を貼っただけでも気になる人はいると思いますが、e-Rubberなら絆創膏のように軽くて、薄くて、巻けるようなものが開発できるのではないかと期待しています。もちろんワイヤレスにするなどのたくさんの課題はこれから解消していかなければいけません。
心臓の動作を再現する手術訓練シミュレータ
心臓や脈動の「ドクンドクン」という感覚の再現は低周波でないと実現できないと言われている。私達の触覚は心臓や血管が膨らんだり縮んだりする様子まで敏感に感じ取っている。それをトントンといった高い周波数だけで表現しても触覚では不自然に感じてしまう。この低周波ならではの特徴を利用して、豊田合成は外科医を目指す人が心臓のバイパス手術を練習するための機器「SupeR BEAT」を早稲田大学発のスタートアップ企業であるEBM社と共同で開発した。

心臓の部分にe-Rubberが活用され、実にリアルな鼓動を刻む。バイパス手術では心臓の表面の血管と別の新たな血管を縫合してつなぐといった手術が行われるが、動く心臓が再現できない模型では施術の困難さは再現できない。この機器では、絶えず動作する心臓の上で、縫合するための血管も上下するので、困難極まりない。しかし、それこそが実践に近い状態だと言う。なおかつ、「SupeR BEAT」では心臓の鼓動を不規則に変えることもできる(デモ動画を参照)。
■ 動画 心臓の動作を再現する手術訓練シミュレータのデモ
藤原氏
風船を膨らませるとき、息を吹き込み始める最初が一番、力を使いますよね。これが通常のゴムの特性で、最初の伸びに力が必要で後はそれほど力は入れなくても伸びていってパチンと切れます。しかし、皮膚や筋など、人体の場合は最初に伸びやすくて限界の手前で踏ん張って、それから切れる、つまりゴムとは逆の特性を持っています。しかし、e-Rubberの超分子構造は人体に近い特性があり、生体模倣に最も適している材料だと感じています。
黒木氏
医療分野では、遠隔診療や遠隔治療などが将来に向けてのテーマになっていますが、e-Rubberを使って触覚が共有できるようになれば、ロボットによる遠隔での触診も実現できるのではないかと考えています。例えば、乳がんのしこりの発見なども可能になるかもしれません。

全身に触覚センサーやアクチュエータを纏う、そんな時代に
編集部
南澤先生はe-Rubberがどのような領域で特に活用が進みそうだ、とお考えですか
南澤氏
研究室では3つのことに注力していて、その全てでe-Rubberは活用できそうだと感じています。
3つとは、エンターテインメントなども今あるものを「拡張」すること、感覚を体験として共有したり「シェア」すること、そして、全くゼロから新しい感覚を「創り出す」ことです。
エンターテインメント用では、私達は既にクリエイターの水口哲也さんと共同でPlayStation VR用に「シナスタジア・スーツ」の開発に携わっています。シューティングゲームで撃ったり撃たれたりなどの感覚を全身で感じられる共感覚スーツです。今あるアクチュエータを埋め込んだスーツで表現できない領域もe-Rubberなら再現できないか、そんな研究をしていきたいと思います。例えば、VRゲームの中で人や動物に触ったり、触れる、触れられる、押されたり、つかまれたり、抱きしめたり抱きしめられたり、という感覚の再現です。
編集部
手軽な実現方法としては、デバイスはグローブになるでしょうか
南澤氏
最初の製品形態としてはグローブかもしれません。それがベストのような服になったり、本格的なものではボディスーツ型のようなものがこれからも開発されていくと思います。ただ、その時に服やスーツの中に無数の硬いアクチュエータが埋め込まれていると、違和感を感じる人もいるでしょう。だからこそ布や繊維、ゴムのような柔らかくて装着して違和感がない、かつ面積全体で触覚を伝えられるような素材が最適になると考えています。
ここまではe-Rubberをアクチュエータとして利用するケースでしたが、センサーとして利用する場合は、ロボットが皮膚として全身に触覚センサーを纏う、そんな時代が来るかもしれませんね。
ロボットや医療分野への応用
編集部
ロボットの皮膚としてはゴム素材でセンシングできる特製は最適かもしれませんね。ロボットの話題が出ましたのでお聞きしたいのですが、その他にはどのような応用方法が期待できますか
南澤氏
まずは遠隔操作、テレイグジスタンスの領域ですね。AI関連技術の進歩もあって、ロボットのビジョン(視覚)が識別したり判断できることが拡がり、ロボットが自動でやれることはロボットに任せておけばよいという時代になってきました。しかし、人の判断が必要だったり、人の作業をロボットが拡張している領域はまだまだたくさんあるので、これからますます触覚の必要性は出てくると思います。
医療で言えば、手術支援ロボットは医師が経過を判断しながら慎重に操作して手術を進めますが、現時点では触覚がありません。また、先ほども例として出ましたが、遠隔からロボット操作によって触診したり脈をはかるなどの診療は技術的には割と早く実現できそうな気がしています。医療のほかにも職人技が必要な分野ではロボットと触覚の組み合わせで実現できることはたくさんあると感じています。

編集部
認可などの課題は別として、乳がんの触診が技術的に実現できる見込みはどれくらい先のことでしょうか
南澤氏
3~4年で実現できるのではないでしょうか。実証実験やトライアルなら、もっと早く実現できるでしょう。また、テレイグジスタンスには「5G」(第5世代通信技術)が関連しますが、5Gの進化とともに技術的な進歩は一気に加速する可能性はあります。
編集部
産業用ロボットへの応用としてはどうでしょうか、特にセンシングにおいてはいかがでしょう
米原氏
産業用ロボットは位置制御において精度が高く、成熟した技術が使われています。今回のロボデックスではそこに触覚を入れたデモ「おでんロボ」を展示する予定です。ロボットが触って殻付きの卵か、それともゆで卵かを触覚で判断するものです。触覚が加わると人の代替で機械ができる作業やロボットによる自動化がより拡がると考えています。
南澤氏
もし、そのシステムに触覚のAI技術が加わると更に精度の向上が見込めます。とにかくいろいろなものを触って触覚データを蓄積し、ビッグデータをディープラーニングで機械学習することで、触覚からモノを認識したり、果実の成熟度を判断すること等ができるようになるかもしれません。
黒木氏
そうした流れから、ロボットに触覚センサーを早めに導入して、いち早くデータを収集しはじめることも重要かもしれませんね。
次のステップはネット接続とハプティクスの共有
編集部
今後はどのように開発、実用化していくか、マイルストーンをお聞かせください
神崎氏
今回のロボデックスの出展のように、当社としては新しく開発した技術を迅速に公開して、その技術がどんな分野のどんな領域で活用できるかのお声を広く頂きたいと思っています。研究機関や企業の方々と連携してこの技術を育てていきたいと考えています。

南澤氏
現在のデモでは、センサーとe-Rubberを有線で接続していますが、それを無線化し、インターネットを介してデータのやりとりをすることが次のステップのひとつだと考えています。インターネットに繋がれば、遠隔操作や共有に実際の距離は問題ではなくなりますし、同じ触覚を多くの人と同時に共有できるようにもなります。また、今は指先のサイズですが、この面積を広げ、グローブや服、スーツなど、サイズを大きくしていきたいです。実はサイズを大きくしていくことは他にはないe-Rubberの特徴だと感じています。他の方法ではアクチュエータを並べて点を増やす方法になりますが、e-Rubberは面で広げていける可能性があるからです。

米原氏
将来は、「e-Rubber」を使って、センサーとアクチュエータが一体になって、かつ双方向でやりとりできるデバイスとして、提供できるように開発を進めています。



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
ロボスタ編集部PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

