
ロボット関連製品の開発・製造・販売を行うヴイストン株式会社は、4輪の独立駆動輪を備え、それぞれの車輪をステアリングで方向転換させることにより全方向へのスムーズな動作を実現する、研究開発用台車ロボット「4WDSローバーVer2.0」を1月31日より販売を開始した。
旧製品である「4WDS ローバー」で好評な機能はそのままに、ROS による制御に対応し、さらに柔軟で容易なアプリケーション開発を可能とした。本体価格はオープン価格で、販売サイトでも価格お問い合わせ商品となっている(2月6日現在)。
■【動画】4輪独立ステアリング駆動ROS対応台車ロボット 4WDSローバーVer2.0
「4WDSローバーVer2.0」の特長
同製品の可搬重量は約40kg。最高速度1.6m/sで、様々な用途の研究や開発用のベースロボットとしての活用の他、搬送台車など広範囲な用途に対応できる。Wi-Fi / BLE / Bluetooth Classicの無線通信規格と、USBシリアル通信に対応しており、PCやタブレット、Raspberry Piなどから制御可能。また、ROSを使った制御に対応しており、制御ボードには、Arduino互換ボード「VS-WRC021」を搭載。Arduino IDEを用いてプログラムすることで動作させることも可能だ。
全方向移動台車ロボット
4輪のメカナムホイールを駆動輪として使用しているため、前後方向の移動や旋回動作だけでなく、左右方向や斜め方向への平行移動が可能。さらに、各ホイールにサスペンションを装備したことで、1cm程度の段差であれば各輪が確実に接地し、安定した走行を実現した。

無線/有線接続で制御
Wi-Fi / BLE / Bluetooth Classic の 3種の無線通信と、有線の USBシリアル通信に対応している。指定のコマンドを用いることで、PC やタブレットなど、様々なデバイスから本体を制御することが可能。Raspberry Pi の GPIO ソケットと互換のコネクタが搭載されているため、ロボット本体にRaspberry Piを簡単に搭載でき、制御にも使用することができる。

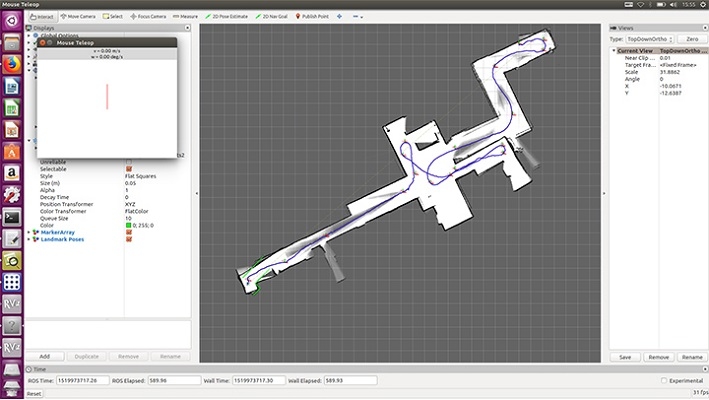
ROSメッセージ通信でコントロール
Wi-Fiまたは、USBシリアル通信を用いてROS環境に接続できる。ROSのメッセージ通信対応のため、速度や旋回量の指令値を、わずか数行のコードでメカナムローバーに送信可能。導入ドキュメントとサンプルプログラムが付属するため、初心者でも、ROS 環境で制御システムを作成し、簡単に動かせる。なお、ROSを動作させるデバイスは別途用意する必要がある。
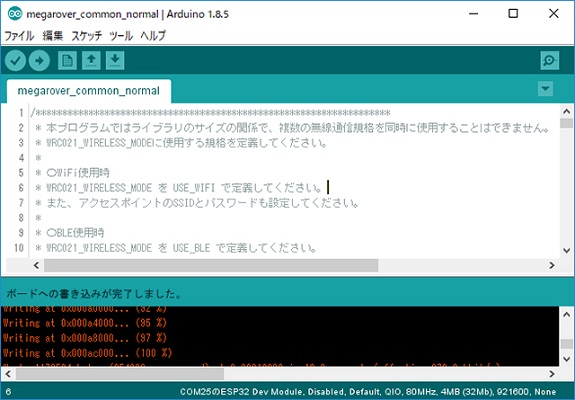
Arduino IDEでプログラム可能
メカナムローバーVer2.0の制御ボードである「VS-WRC021」には、ESP-WROOM-32 マイコンが搭載されているため、Arduino IDEを用いて制御プログラムを作成することが可能。また、製品付属のライブラリには、モータ制御関数や通信関数が含まれており、少ない開発負担で制御プログラムを作成することもできる。
▼ 製品概要
| 製品名 | 4WDSローバーVer2.0 |
|---|---|
| 型番 | 4562179394534 |
| 価格 | オープン |
| サイズ | 383(L)×376(W)×188(H) [mm] |
| バッテリー | 12Vシール鉛312wh |
| 駆動方式 | 4輪駆動、4輪独立ステアリング、サスペンション |
| モータ | DCモータ 70W×4 |
| 回転検出 | ホール素子、エンコーダ ※要エンコーダオプション(別売) |
| 付属品 | 充電器、無線コントローラ |
| インターフェース | USBシリアル、Wi-Fi、Bluetooth Classic、BLE ※注文時オプション:バンパーセンサ(前後、全周)、レーザレンジファインダー、Raspberry Pi 3B、ホイール用エンコーダ |
ヴイストン株式会社



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
ロボスタ編集部PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

