「春には農業用の自動収穫ロボットも実践導入します」
スマートロボティクスは大きく変わった。スマートロボティクスと言えば、ロボット業界ではコミュニケーションロボット関連で知られてきた。オリジナルコミュニケーションロボットの設計・製造や、コミュニケーションロボットから多軸ロボットに活用できる「バランス制御モーション作成ツール」ソフトなども開発し、コミュニケーションロボットに特化した企業だと思っていた。
しかし現在、同社は大きく転換をはかり、作業を支援する業務用ロボットの開発やロボット駆動部品の自社開発を行っている。
自律型搬送ロボット(AGV)の開発
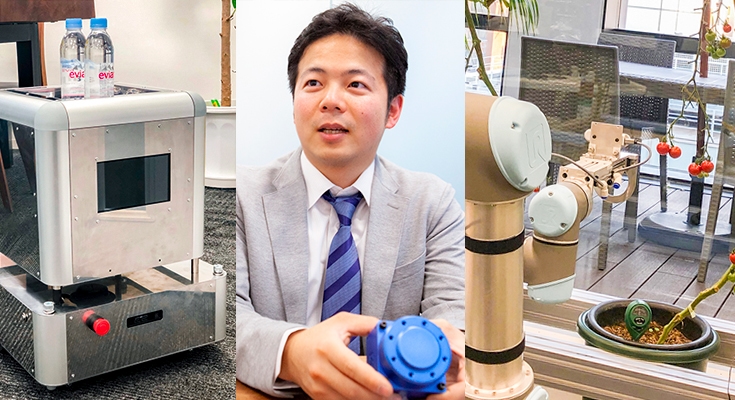
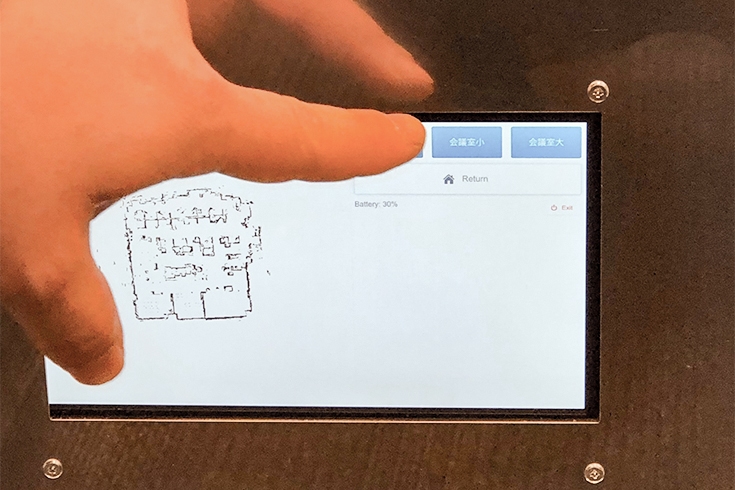
ロボットなどの機械を自律走行させる誘導方式技術は複数あるが、スマートロボティクスが開発した自律型の搬送ロボットは、家庭用清掃ロボットなどでも使われている「SLAM式」の技術が使われている。側面のタッチパネルで、目的地を指定すると、LiDARで障害物や、オフィス内特有の椅子の足なども検知しながら目的地まで移動する。
まずは、自社内でペットボトルを運ぶ搬送ロボット(AGV)がコンセプトモデルとして完成。今後は、クライアントの要求に合わせてカスタマイズし、さまざまなものを運ぶAGVとして商品化するマイルストーンを描いている。
自社内で使用している搬送ロボットも、次のカスタマイズ案があり準備を進めているとのこと、どのような搬送ロボットができあがるのか楽しみだ。

自律型の搬送ロボット以外にも、業務用のキャタピラー型清掃ロボットや農業用の収穫ロボット開発、ロボット駆動部品の開発を進めているスマートロボティクスは、新しいフェーズへとさしかかっている。
今後の動向について、同社CTOの服部氏に聞いた。
農業向けのトマト収穫ロボット
編集部
自社製品として開発を進めているものにはどんなものがありますか?
服部氏
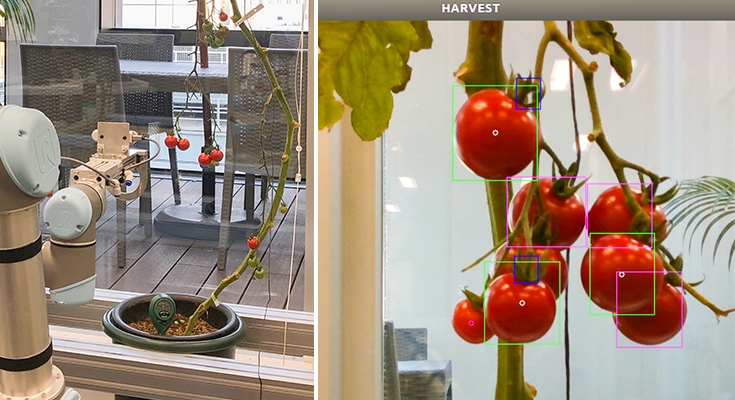
今年、実戦導入するものとしては農業向けの収穫ロボットがあります。トマトを自動で収穫するロボットです。木になっているトマトを画像認識して、熟している実を判別、ロボットアームで摘み取るしくみです。実証実験ではなく、実践で導入してくれる農家が既に決まっていて、現在は開発を急ピッチで進めている最中です。

編集部
どうして収穫ロボットを開発しようと考えたのですか?
服部氏
不定形物体や、ハウス内も含めた屋外に近い環境で安定して動作する認識・制御技術を実現したロボットを開発導入することで、これまで困難であった農業分野や、飲食業界などへのロボット技術導入も容易になっていくと考え、実績を作りたいと思ったからです。また、ロボットアームや台車のハードウェアも既存の産業用ではなく、開発中のアクチュエーターモジュール(後述)で構成するとシンプルなシステム構成で実現でき、導入コストや手間を削減できると考えています。将来的には、専門のロボットシステムインテグレータに頼らずとも導入できる制御ソフトウェアとハードウェアを組み合せたパッケージで提供することを見込んで開発を進めています。
編集部
なるほど。収穫ロボットについて、現状の開発状況と、最終的にはどのような技術が投入されるのか教えてください
服部氏
ディープラーニングを使った機械学習でトマトの識別精度を向上させている段階です。現段階ではレールを使って移動するしくみですが、自律移動機構を導入する予定です。また、今はソフトウェア関連と先端の手になる部分(エンドエフェクター)のブラッシュアップを中心に行っているので、アーム部は既存のロボットアームを流用していますが、将来は自社で開発したアクチュエータ・モジュールを使ったロボットアームと、台車に切り替えていく予定です。
駆動部品群であるアクチュエータ・モジュール開発と製品化について
編集部
アクチュエータ・モジュールを自社で開発しているのですか?
服部氏
はい。
私たちロボットエンジニアは、開発に必要なモータやブレーキなどの各種駆動部品をそれぞれ調達して設計・製造をしているのですが、これらの部品群が一つになったモジュールがあるとロボット開発の設計・製造工程が削減されて非常に助かるんです。
現在、市場に出回っているアクチュエータ製品は産業向けが大半で、一部廉価なホビー、研究用途向けの両極端になっている傾向があると考えています。
産業用は頑強で精度も高く、大出力品も有りますが、ドライバ等の外付け回路が必要で大型なものが多く、ホビー用は比較的廉価で軽量な物が多いですが、業務で使うには出力や、耐久性や精度が足りません。
私たちのアクチュエータ・モジュールはそのすき間を埋める製品です。また、ロボットアームでの使用も考慮しておりまして、電源喪失時に、腕が落ちないようにブレーキがかかる構造になっており、エンジニアの方がロボットを開発する手間を少しでも抑えることができたらいいと思っています。

編集部
必要な部品群をオールインワンでまとめ、「ちょうどいい」パワーサイズと価格のアクチュエータ製品を狙うわけですね?
服部氏
そうです。開発中のアクチュエータ・モジュールは、サーボモーターや関節の角度を測るアブソリュートエンコーダ、どんな角度から荷重がかかっても強いクロスローラベアリング、自社開発のドライバーや減速機なども一体化したものになります。ある程度の剛性とパワー、精度を持ちながら、これまでの産業機器向けの製品を集めて構成したものより高額ではないものにしたいと思っています。一軸あたり10~20万円程度の価格設定が目標です。
ロボットがこれからもっと身近になり、普及していくために必要な性能と価格のアクチュエータ・モジュールだと考えています。これを使えば、開発者の方々も特に細かいことを考えずにロボットの設計や開発が行えるようになります。
お陰様で、展示会などで出展させていただくと、コンセプトに共感いただき、各種ラインナップ展開をご要望としていただくことが多くあります。
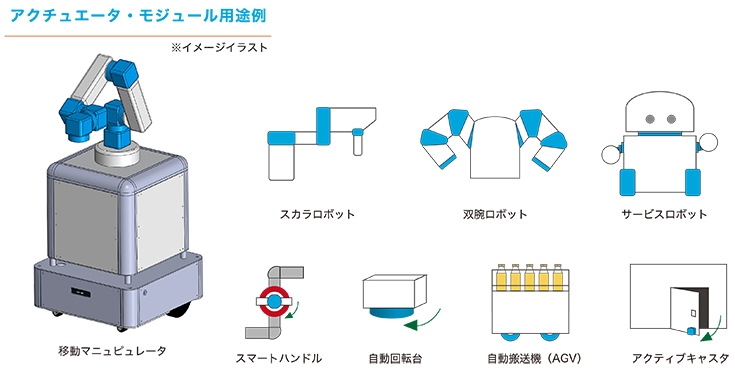
ちなみに「アクチュエータ・モジュールからまずは商品化しよう」と決めた理由は、アクチュエータは幅広い分野と幅広い用途で利用頂けるからです。
編集部
例えば、どのような分野で利用できますか?
服部氏
ロボットの場合は、アーム部はもちろん、首や腰、足などのあらゆる関節に利用できます。自動搬送車であれば、これに車輪を付けて駆動輪に利用することもできます。駆動や稼働する部位にはなんにでも利用できます。
Pythonパッケージを提供予定ですので、ロボットエンジニア以外の方でも、自動回転台など、何かを動かすための駆動部品として利用いただけると思います。現段階は開発フェーズなので、実際に導入して使って頂きながら、必要な機能や性能を高めていくことに注力しています。
編集部
発売はいつを予定していますか?
服部氏
まずは、アルファ版製品を6月から出荷予定です。その後、7月〜8月頃から量産開始を予定しています。
その頃にはアクチュエータ・モジュールをアームや搬送ロボットに組み込んだ例なども紹介できると考えています。
1月から開始したアルファ版製品の予約は、受付開始後すぐに初回出荷予定分の予約が埋まってしまい、現在は二次出荷の申込を受け付けているそうだ。
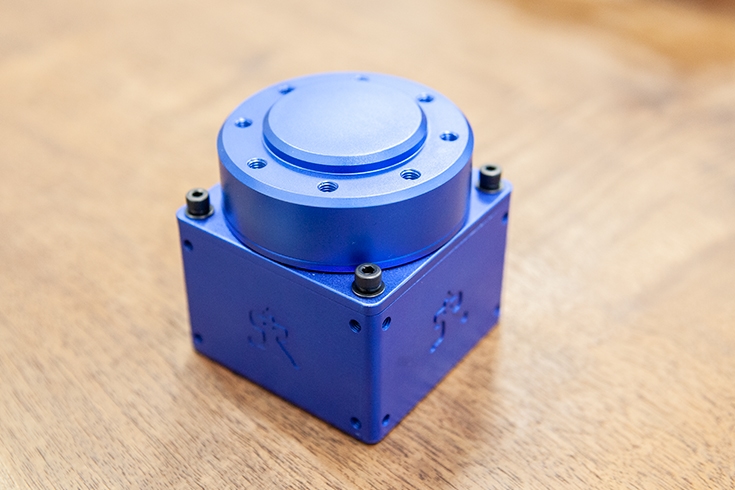
■アクチュエータ・モジュール「Buldit Actuator」の主な仕様
| 寸法 | 72 × 72 × 79 mm |
|---|---|
| 重量 | 800g程度 |
| 減速比 | 105.73 |
| 定格回転数 | 34.7rpm |
| 定格トルク | 5.5Nm |
| 停動トルク | 51.6Nm |
業務拡大に向け、技術者も募集
同社ではハードウェア、ソフトウェア分野にかかわらずエンジニアを募集している。特に機械の構造や機構、FA関連に興味があり、構想設計ができるハードウェア・エンジニアが更に必要なようだ。

詳細は同社のホームページから問い合わせることができる。
株式会社スマートロボティクス



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
ロボスタ編集部PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

