

三菱地所が多関節アームを搭載した「多目的壁面作業ロボット」の実証実験を2月末より16日間、新丸の内ビルディング(新丸ビル)にて行っている。本日、その様子を報道関係者向けに公開した。
このロボットは当初、外窓の清掃を目的として実験が行われる。

外窓の清掃自体は自動化が既に進んでいる。新丸ビルでも外窓用の自動清掃機が複数台導入されているが、その更新時期が数年後に迫っていて、そのタイミングを見据えて、清掃以外にも高所外壁でのいろいろな作業ができるロボットの導入ができないか、ということで日本ビソーに相談したことから、このプロジェクトが始まったと言う。

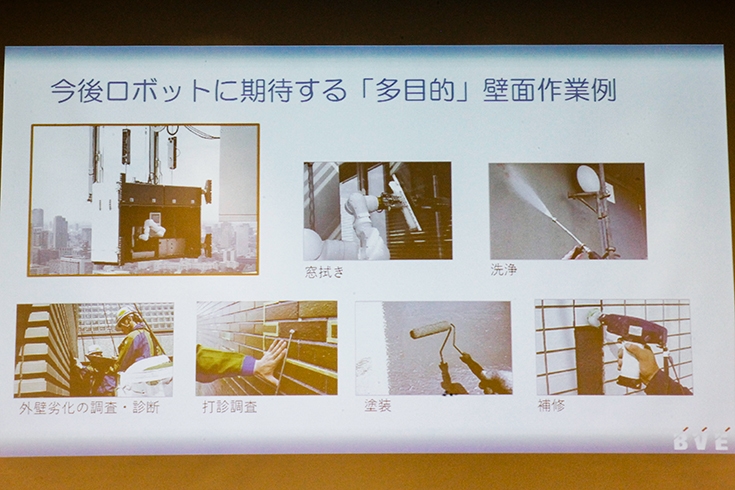
そのため、今回導入するロボットは窓清掃の専用ロボットではなく、「多目的壁面作業ロボット」と命名されている。将来は窓枠やシールの点検、タイルの打鍵検査、耐震メンテナンスのチェックなど、幅広い用途に利用できることを想定している。その多目的の業務の第一弾がまずは外窓の清掃となった。

こうした背景から、現状では窓清掃専用の自動ロボットと比較すると、「多目的壁面作業ロボット」の目に見えたメリットはほとんどない。しかし、将来、できることが増えて、汎用性が上がることによって、コストダウンに繋がったり、深刻な労働者不足の対策となる、と三菱地所では考えている。
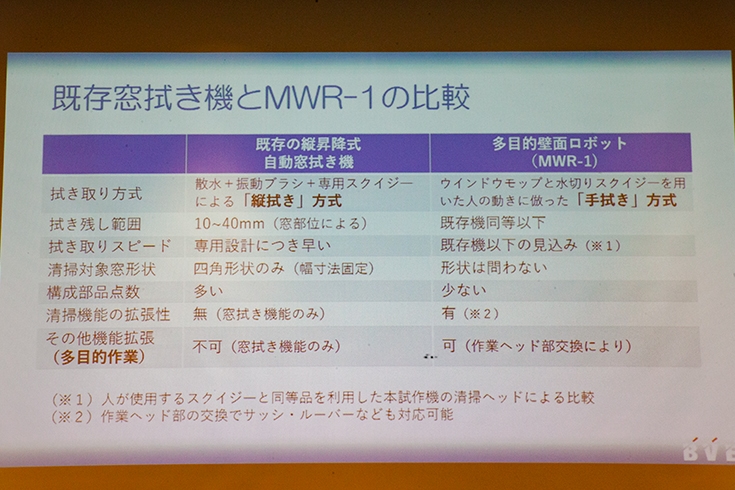
長い目で見れば、形状が四角形の窓以外も拭けるようになる、構成部品点数が少ないため、メンテナンスが簡単でコストが安い、作業ヘッドの差替によって様々な作業を行う多目的性(汎用性)が期待できる、などのメリットを掲げた。
多目的壁面作業ロボットによる超高層ビルの窓清掃
「多目的壁面作業ロボット」はコンドラの中に収容され、高層ビルの屋上からケーブルで吊られて下降していくしくみだ。電源もケーブルで屋上から供給される。


高層ビルには窓の両側に自動清掃機等が使用するためのガイドレールがあるので、それに沿って一階ずつ下降しながら清掃していくしくみだ。


■動画 三菱地所が新丸ビルで実証実験
今回実験導入された多目的壁面作業ロボット「MWR-1」
「MWR-1」は多くの光電センサーを使って窓枠を認識している。このセンサーで窓枠やサッシを検知してスタート地点を定めると、そこからはティーチングされたとおりに自動で窓を拭いていくしくみだ。

光電センサーとは、文字通り、可視光線や赤外線などをセンサーの投光部から発射し、反射する光を検知して物体の位置や形状を認識するしくみ。

今回公開された「MWR-1」にはRGBカメラは搭載されていない。オフィスで働く多くの人たちにとって、窓拭き作業員の視線が気になるのと同様、RGBカメラはセキュリティやコンプライアンス上、微妙な位置づけにあるためだ。
一般的に見れば、現在、作業用ロボットでは多くの分野でRGBカメラによる画像認識が活用されている。ディープラーニングなどのAIニューラルネットワーク関連技術を使うことで高精度で物体の認識が可能なためだ。ドローンと組み合わせて、タイルや橋梁のクラックなどを発見するシステムも既に実用化されている。
現時点では、RGBカメラは装備されていないが、外壁の作業を担うことになれば、必然的にAI関連技術の導入が検討されていく方向になるのではないかと感じている。



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
神崎 洋治PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

