


国立研究開発法人宇宙航空研究開発機構(JAXA)と鹿島建設株式会社らは、2019年3月28日、「宇宙探査イノベーションハブ(http://www.ihub-tansa.jaxa.jp、愛称TansaX)」の共同研究成果の一つとして、月での無人による有人拠点建設をイメージした自動化建設機械2機種によるデモンストレーションを、小田原市西湘テクノパーク内にある「鹿島西湘実験フィールド」で実施した。自動化装置を実装した7tバックホウと5tキャリアダンプが、1/3スケール模擬居住区を埋めるための掘削、積み込み、運搬の作業を自動で行った。


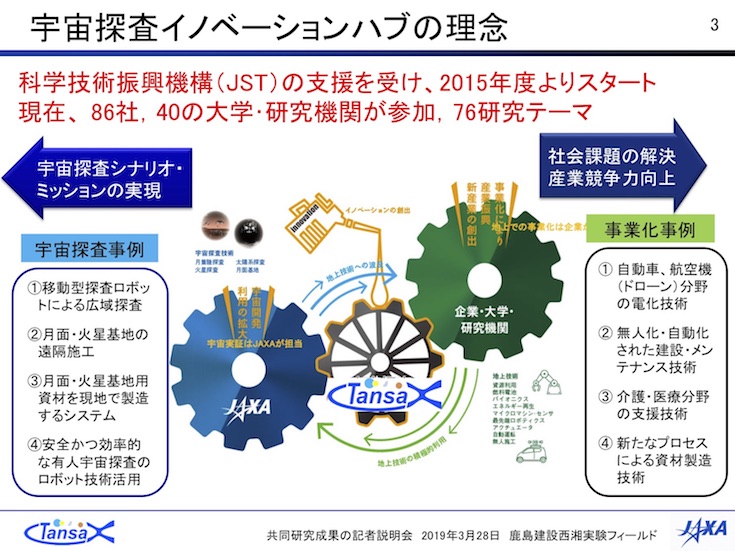
「宇宙探査イノベーションハブ」は様々な異分野の人材・知識を集め、これまでにない新しい体制や取組でJAXA全体に宇宙探査に係る研究の展開や定着を目指す組織。「広域未踏峰探査技術」「自動・自律型探査技術」「地産・地消型探査技術」の3つの研究分野を中心に新技術に取り組んでいる。
今回の技術は、JAXAと鹿島建設のほか、芝浦工業大学、電気通信大学、京都大学らが2016年から共同で研究を進めてきた「遠隔操作と自動制御の協調による遠隔施工システムの実現」の成果。
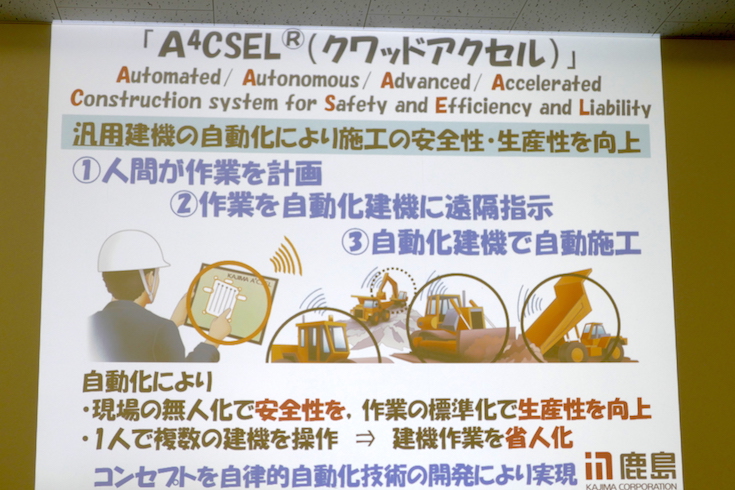
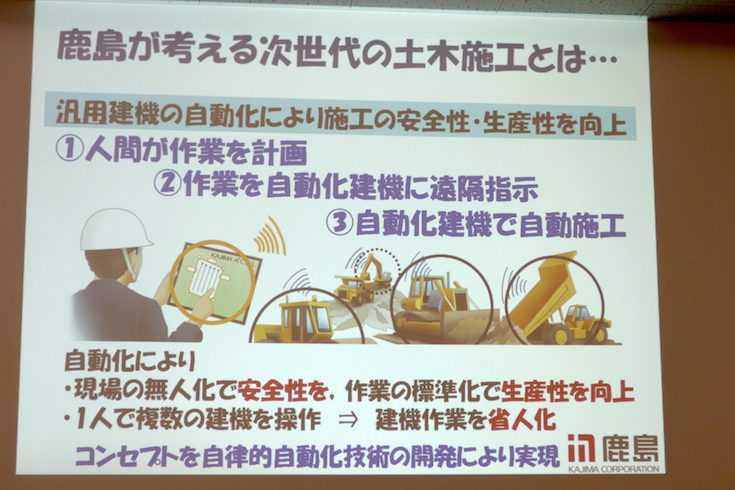
鹿島は、建設機械の自動化による次世代の建設生産システムとして「A4CSEL(クワッドアクセル、Automated / Autonomous / Advanced / Accelerated Construction system for Safety , Efficiency , and Liability。 https://www.kajima.co.jp/tech/c_ict/automation/index.html
)」を推進している。クワッドアクセルは汎用の建設機械にGPS、ジャイロ、レーザースキャナーなどの計測機器や制御用PCを搭載して建機の自動運転を実現したもので、一人で複数の自動化重機を同時に稼働させるというコンセプトの技術だ。

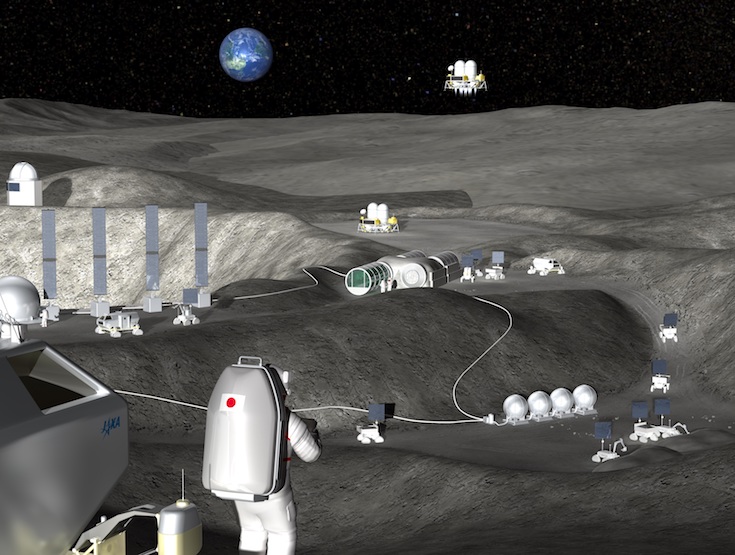
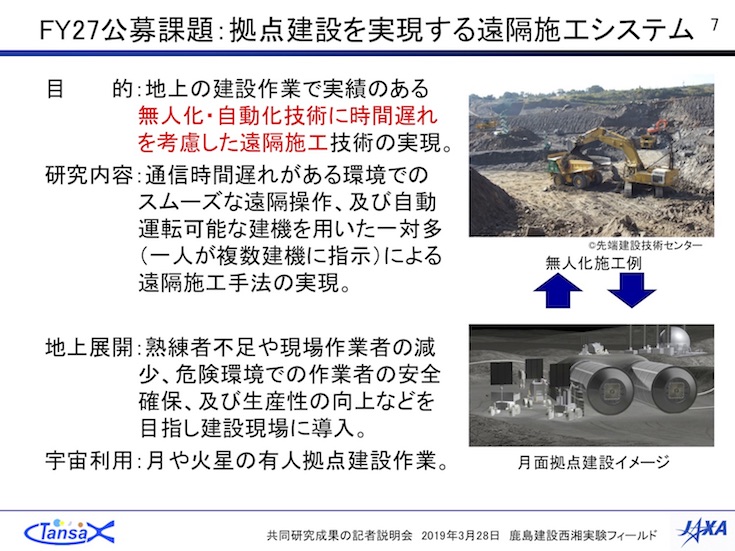
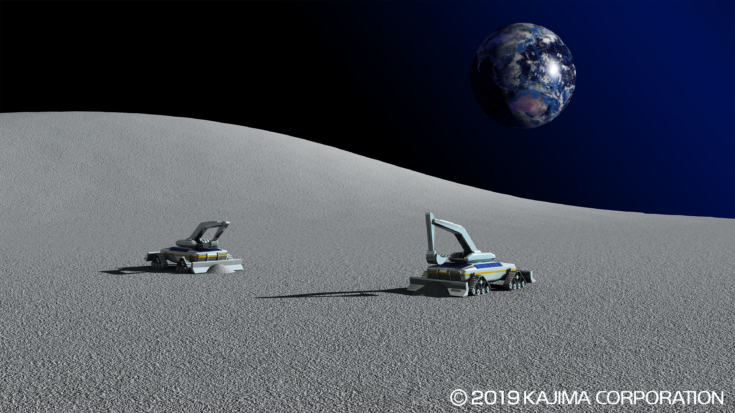
JAXAは、「月・火星での無人による有人拠点建設」という課題において、『2040年頃に火星に6人が長期間滞在可能な拠点がある、それに向けて、2030年頃に月に4人が長期間滞在可能な拠点が構築される』という想定をしている。そのための「自動・自律型探査技術」として、鹿島の提案が、平成27年度研究提案募集の中で課題解決型技術として採択されて、研究開発を進めて来た。
月と地球とのあいだでやりとりすることになるので、通信時間の遅延があるなかでもスムーズな遠隔操作や、建設機械が障害物や他の建機を避けながら行う自動作業、建機同士による自動協調作業を行う技術の研究を行い、月や火星での有人拠点建設だけではなく、地上でも熟練者不足や作業者の不足や安全性確保、生産性の向上を目指して建設現場への導入を狙う。

地上の夢と技術が宇宙の夢へと繋がる

JAXA 宇宙探査イノベーションハブ ハブ長 久保田孝氏は、「宇宙探査イノベーションハブ」の趣旨を「地上の技術と宇宙の技術を融合して両者のビジネスを促進しようということで始めた」と紹介した。今回のプロジェクトは、遠隔操作と自動制御の協調による無人化施工を確立しようというもので将来の月面基地建設だけでなく、地上の建設技術の革新につながると考えていると述べた。

鹿島建設株式会社 専務執行役員 土木管理本部副本部長 高田悦久氏は、まず鹿島の「A4CSEL(クアッドアクセル)」について紹介した。「A4CSEL」は重機の作業の生産性向上を目指して10年前から鹿島が取り組んできた技術で、3つのダム現場と実験フィールドで実験を繰り返している。
「開発の動機は継続的な生産性向上と究極の安全性確保にある」という。建設業は生産性が低く、労働災害が多い。このような環境のなかでは、若い人材の参入が望めない。だが無人化技術を使えばオペレータの労働災害は起こらないし、重機まわりの安全性もセンサーの活用によって上がっている。高田氏は「建設業の魅力を上げることが我々の夢」だと述べ、「地球上における小さな夢の実現がJAXAの宇宙における大きな夢につながることを祈念している」と語った。
宇宙応用を考えることで地上技術も進展させる

JAXA 宇宙探査イノベーションハブ 副ハブ長 川崎一義氏は、「宇宙探査イノベーションハブ」はJAXAの研究開発のやり方自体を発注型から参画型へと変えたいと考えているものだと述べた。宇宙開発だけではなく地上技術にも革命を起こしたいと考えているという。そのために民間のニーズを調査し、研究課題を募集して研究を進めてきた。

なお愛称「TansaX」の「X」は、地上と宇宙の両方に出口があることを示すもの。「タンサ」はもちろん日本語の「探査」である。
将来、月面上で人が活動することを考えると、拠点を建設しなければならない。そのための技術は地上での技術と共通点が多く、宇宙での応用を目標に開発することで地上技術にも大きな進展をもたらしたいと考えているという。
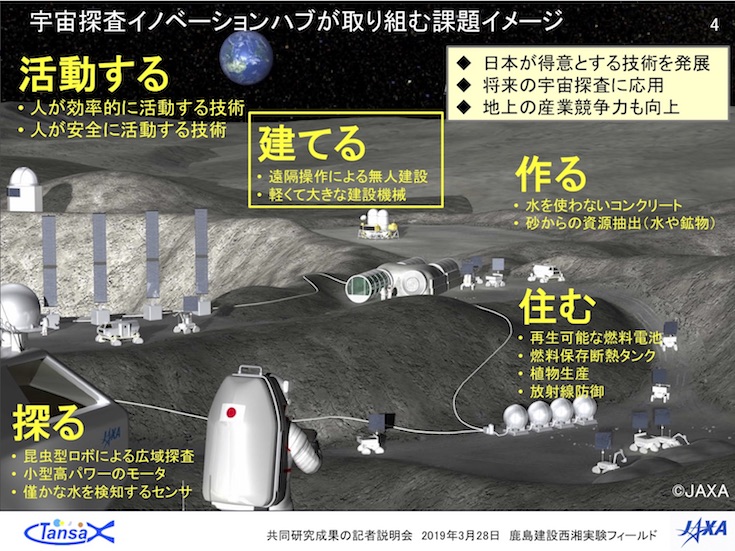
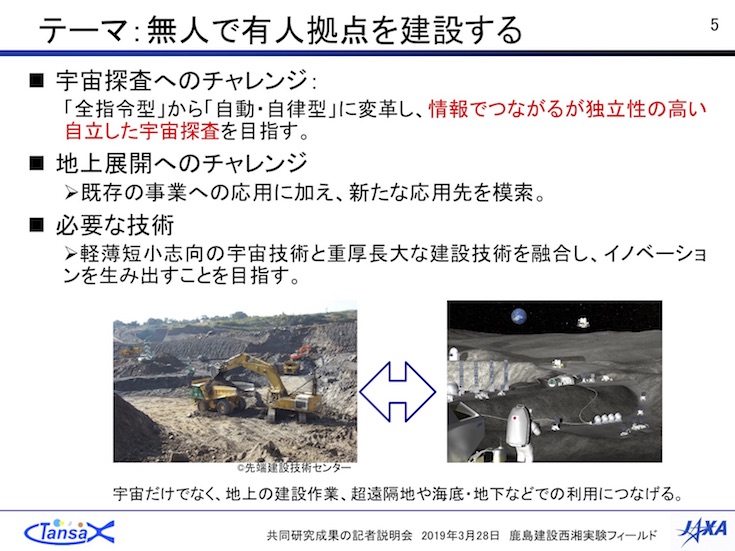
今回のプロジェクトでは、地上から全指令を送るのではなく、自動・自律の建機同士が繋がって、自立した宇宙探査を行えるようにすることを目指している。宇宙と建設という観点でこれまでを振り返ると、アポロの時代は建設作業はなかった。宇宙ステーションは宇宙飛行士が組み立てたが、地上に頼っている部分も大きい。将来の月においては、自立化をさらに進め、できるだけ人は使わずに、なるべく自動機械が建設を進めることを目指す。月に通信で指令を出すと3秒から8秒程度の時間遅れが生じる。そのなかでもスムーズかつ、一人が複数の建機を動かす技術の実現を目指している。
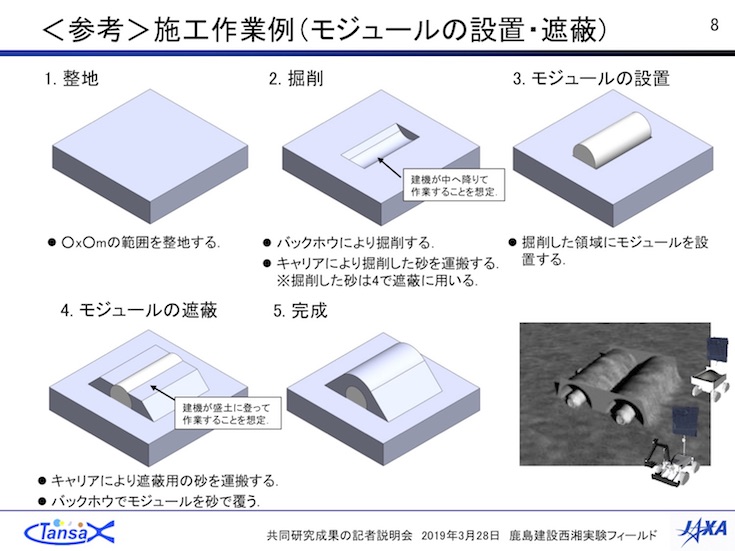
テーマ募集時に示したイメージは、整地して掘削、そこにモジュールを設置して、砂をかけて放射線や隕石から遮蔽して完成させるというもの。これを実現することが目標だ。
無人・自動化で土木施工の安全性・生産性を向上させる

鹿島建設 技術研究所プリンシパルリサーチャーの三浦悟氏は、無人で有人拠点を作る試みを無人化施工の技術と絡めながら解説した。基本的な考え方はこうだ。一人がたくさんの無人重機を動かせれば生産性が上がる。ただし機械にはやるべきことの指示を出さなければならない。そのための手順を標準化してやれば生産性をあげることができる。
そのためには自動と遠隔操作の結合のための通信遅延の補償、自己位置推定や地形認識を基本にした動作判断、協調動作などが必要だ。人間は0.5秒以上の操作遅延があると遠隔操作ができないと言われているという。この問題に対しては芝浦工大と共同で取り組んだ。先に建機の動作を予測して、その予測映像をオペレーターに見せることで時間補償を行なった。
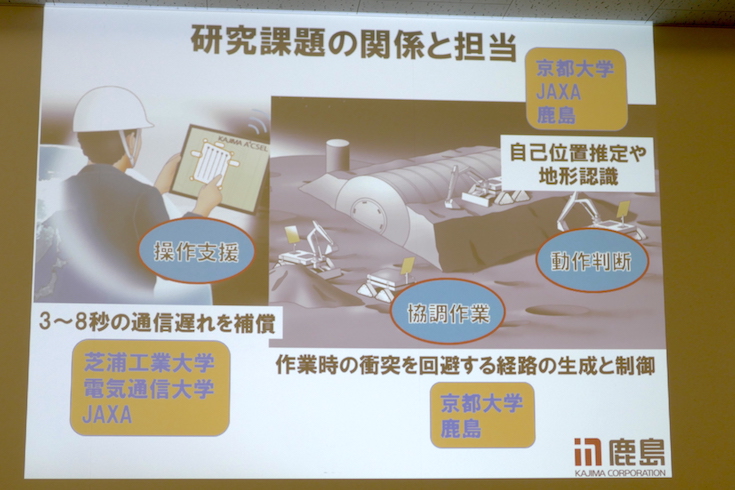
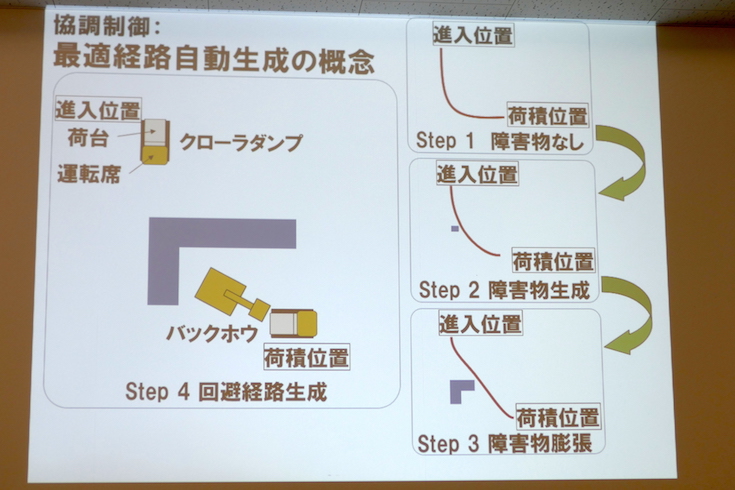
クローラダンプとバックホウの協調制御については、それぞれの建機の動作の特性や荷積のための位置、障害物の位置を認識しつつ、自分の経路を決めなければならない。その課題に挑んだ。
三浦氏は「宇宙開発に技術が使われることはモチベーション向上にもつながるし名誉なこと」と述べた。
二台の自動建機による無人化施工デモンストレーション

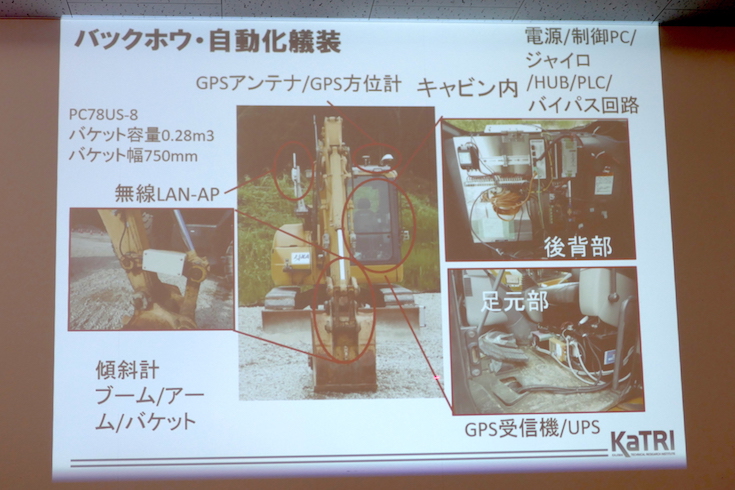
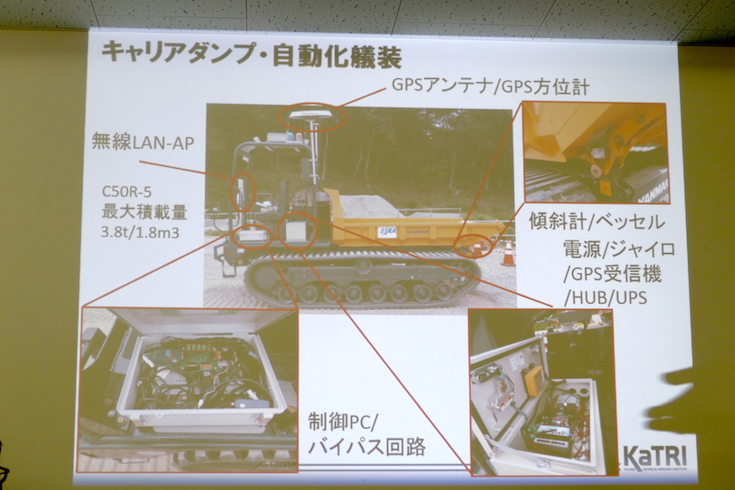
デモは鹿島建設 技術研究所 上席研究員 浜本研一氏から解説を交えながら行われた。自動化建機はいずれも既存の建機にRTK-GPS、補完するためのジャイロなど、各種センサーや電子制御弁などをつけて自動化したもの。

デモはまず自動バックホウの掘削から始まる。掘削の穴は3×4m。深さ0.75m。1/3スケールの模擬居住モジュールは長さ3m、直径1.5m。穴のなかに埋めると、ちょうど半分が埋まるようになる。

掘削した土砂はキャリアダンプに積み、キャリアダンプはその土砂を指定位置に下ろす。今回、模擬モジュールを設置するのは人間だが、排土板を使って埋めるのは自動で行われる。

穴を掘るための時間は30分程度で、全体としておおよそ40分程度の作業となる。
なお、土量の測定などは行なっていない。バックホウのアームの角度も事前に決めたもので、通常は土の硬さを判断しながら変える刃先の入射角度も事前に決められている。鹿島では将来的には土質に合わせて自動で変更するような技術開発も進めていくという。
各建機の位置や方向は主にGPS信号を使っている。月面では着陸に用いたランダーをそのままランドマークにして、レーザーで位置計測したり、ビーコンを用いたり、SLAMを活用するなどの方法を考えているという。

協調動作については、それぞれ建機の作業の安全確認をメインに行なっている。事前に定められた掘削位置に合わせてバックホウが止まり、それに合わせてキャリーダンプが動くわけだが、必ずしも事前に定められた位置に正確に止まるわけではないので、位置を決めたり、作業を1ステップ終えるごとに建機同士が相互に直接通信をして安全確認をしている。移動経路については始点と終点と障害物を定めれば自動生成される。なお障害物認識などをしているわけではないので、障害物については人間が教えてやる必要がある。

まだまだ開発し始めたばかりだが、鹿島の三浦氏は「基本ベースの作業はできるレベルには達している」と評価した。バックホウは穴を掘るだけでなく、法面整形や積み込みにも用いられる。それらの作業も自動化できるように研究開発を進め、ダム工事などのなかですこしずつ導入していくという。

既に一部作業は人を超え始めている無人化技術
鹿島建設・浜本氏は「我々は自動化に注力している。今の土木工事における3K作業をいかになくしていくか、地上の自動化をできるだけ実現したい」と述べ、「その先に宇宙に繋がるのはすごく意味がある」と語った。たとえば高校生などにも関心を持ってもらいやすくなったという。多くの人に関心を持ってもらうことで、自動化技術自体も活発化することを期待していると述べた。
鹿島建設・高田氏は「建設・土木は生産性が非常に低い」と再度、業界全体の課題を挙げた。「土木学科の卒業生でも他産業に流れていくというのが現状。将来の姿を見せることで他産業からも興味をもってもらいたい。若い力が注がれることが良い循環に繋がるのではないか」と期待を述べた。そして「土木のこの分野においては鹿島が先を走っている。これを進めることで先進技術のリーダー役になれればなと感じている。(鹿島の)若手もそれを意気に感じて、こういう開発に取り組んでくれている」と語った。
この分野の作業は、従来は建機オペレーターの熟練度に頼っていた側面がある。だが高田氏によれば、既にダンプの操作においては、人間だと通常13回の作業が必要なところが8回で済むといったように、一部は人間を超える作業ができるようになっているとのこと。事前に多くの作業をやらせたなかから、最適な作業だけを選択し、高精度に繰り返させることができるためだ。
また、最初から「無人で動かす」という前提で研究開発を進めることには、人間による操作性への影響などを考えずに進められるという側面もあり、改善サイクルを高速に回し、生産性をどんどん上げることができると考えているという。
なおJAXAとのプロジェクトは今年度でいったん終了になるが、今後の研究開発についても協議中とのことだ。



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
森山 和道PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

