
米NVIDIAはブログにて、MIT (マサチューセッツ工科大学) の学生が、NVIDIA のJetson AGX Xavier とQuadro RTX 搭載のデータサイエンスワークステーションを使った先進的なAI 手法を学習していることを掲載した。データ収集と模倣学習によって、ミニチュアのAIレーシングカーの自律運転トレーニングを行ったという。
AIレースカーで模倣学習の流れを学習
MIT (マサチューセッツ工科大学) の生徒たちは、NVIDIA 製品を搭載したデータサイエンスワークステーションを駆使して、自動運転について学んでいる。MIT でロボティクスのクラスを専攻している17 人の生徒は、3つのチームに分けられ、ミニチュアのレーシングカーを与えられた。彼らに課せられた課題は、そのレーシングカーに自律走行の方法を教え、MITのSTATA CENTER(スタタ・センター)地下に設けられた複雑なコースを走破できるようにすることだ。
MIT で航空宇宙工学専攻の准教授を務めるサータックカラマン(Sertac Karaman) 氏は、模倣学習の流れについて生徒たちに教えたいと考えており、この学習手法として、人間が示した見本を使って自動運転モデルのトレーニングを行った。
学習内容の詳細
高速な演算機能を持つNVIDIA の「Jetson AGX Xavier」と「Quadro RTX搭載のデータサイエンスワークステーション」によって同氏や生徒たちは、AI を使ったさまざまなプロトタイプを作成できるようになっている。
模倣学習の過程で、生徒たちはTensorFlow のニューラルネットワークをトレーニングして、自分のレーシングカーに自律運転の方法を教えなければならないが、その前に、まず生徒たちは屋内のコースでできるだけ多くのデータを収集して、スタタセンターの廊下やドアの間を走り回る方法をレーシングカーが学べるようにする必要があった。
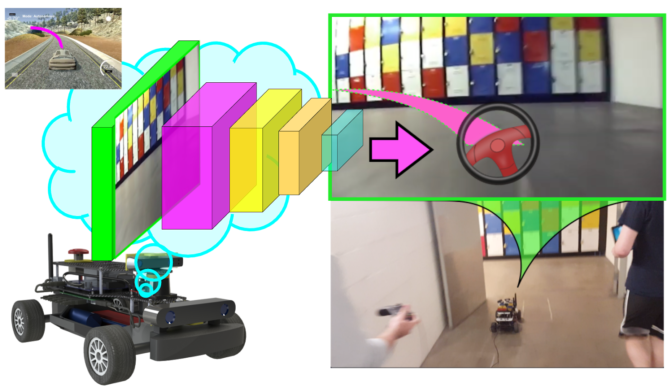
それぞれのレーシングカーには、性能重視の自律動作マシンを想定した組み込みシステムモジュールであるNVIDIA Jetson AGX Xavierが搭載されており、生徒たちはジョイスティックを使って、複雑なコース上でこの小型カーを手動運転し、車体前部に取り付けたカメラを通じてデータの記録を行い、それに続いて、NVIDIA のPilotNet アーキテクチャをベースにしたニューラルネットワークが、記録されたデータを処理し、観察と行動をマッピングする方法を学習した。こうすることで、レーシングカーはカメラの映像に基づいてハンドルの角度を判断できるようになる。
生徒たちは、NVIDIA Quadro RTX GPU を搭載したデータサイエンスワークステーションの高度な演算機能を使って、TensorFlow モデルのトレーニングを行った。トレーニングしたモデルは、その後ミニチュアレースカーに展開し、デバイス上でのAI推論 に利用。このデータサイエンスワークステーションは、トレーニングのパフォーマンスを大幅に高速化し、繰り返し作業にかかる時間を大幅に削減した。これによって生徒たちは、さまざまなモデルのトレーニングとテストを素早く行って、自身のレースカーに最適なモデルを発見できるようになった。
今回の授業について、カラマン氏は次のように述べている。
MIT 航空宇宙工学専攻 准教授 サータックカラマン(Sertac Karaman) 氏
生徒たちがプロジェクトを成功させられたのは、モデルのトレーニングがこれまで体験したことがないほど早く済んだからです。NVIDIA のデータサイエンスワークステーションの高速化された演算機能を活かすことで、クラスでは多くの繰り返し作業を行い、最高のパフォーマンスを発揮するレースカーをわずか数分でトレーニングできました
同氏は今年もNVIDIA のデータサイエンスワークステーションとインストール済みのAI ソフトウェアスタックを使って、ロボティクスの授業を行う予定だと述べている。
https://www.nvidia.com/ja-jp/deep-learning-ai/solutions/data-science/workstations/
NVIDIA



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
ロボスタ編集部PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

