
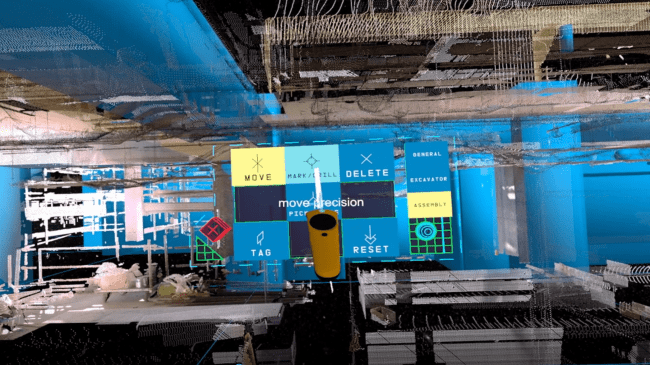
三⾕産業とエスイーフォー(以下、SE4)は、建設現場における穿孔(せんこう:穴を開ける)作業の効率化を図るロボット技術の開発に向けた実証実験を行い、ロボットの自動制御と人間の遠隔指示による正確な穿孔作業のための要素技術を開発したことを発表した。(上の画像はVR空間を通じてロボットに遠隔で穿孔作業の指示を行う様子)
今回新たに開発した技術では、BIMというコンピュータ上に作られた建物・設備の3次元モデル上で人間が穿孔位置を指定することで、ロボットが自らその位置に移動し、目標位置に自動で正確に穿孔作業をすることが可能。
BIMはBuilding Information Modelingの略称。コンピュータ上で実際の建築物と同じような仮想3Dモデルを作り、さまざまな属性情報を付加する設計手法。
穿孔作業の際に必要な「墨出し」は多くの時間を必要とする
建設業界では人手不足や職人の高齢化が問題となっており、業務効率化と作業者の負荷低減が大きな課題となっている。特に効率化・負荷低減が期待される作業の一つに、穿孔作業およびそこに必要な「墨出し」という工程がある。
空調設備機器や付帯する設備を取り付ける際には、事前の位置決めや配置確認を行い、吊り下げるパーツの取り付けや付帯設備を通す空間を確保するための工程が必要になる。これらの作業は熟練工が図面と実際の現場の配置を照らし合わせながら現地を計測し、基準位置のマーキング、通称「墨出し」を行っている。近年では測量機を利用した作業効率手法なども進められているが、作業者自体の負荷低減や作業の省人化による、さらなる施工の合理化や自動化が望まれている。

今回新たに開発された技術では、BIMというコンピュータ上に作られた建物・設備の3次元モデルの上で人間が穿孔位置を指定することで、ロボットが自らその位置に移動し、目標位置に自動で正確に穿孔作業をすることが可能になる。これにより、墨出しおよび穿孔作業を人間が行う必要が無くなり、作業者の負荷低減ならびに業務の効率化を図ることが期待できる。

今回の技術開発にあたっては、空調設備⼯事において豊富な経験を持つ三⾕産業が実証実験のフィールドならびに現場での事例・施工ノウハウやBIMデータを提供し、ロボット遠隔指示の技術開発を行うSE4のロボティクス・コンピュータービジョン・VRの知見を組み合わせることで開発が実現した。
ロボットの指定位置への移動と穿孔作業の仕組み
まず、通常は導入に数百万円程かかっていた測量機の代わりに、数万円程度のデプスカメラを使用して 建物内をスキャンし、そのデータを基に3次元空間にマップを生成。
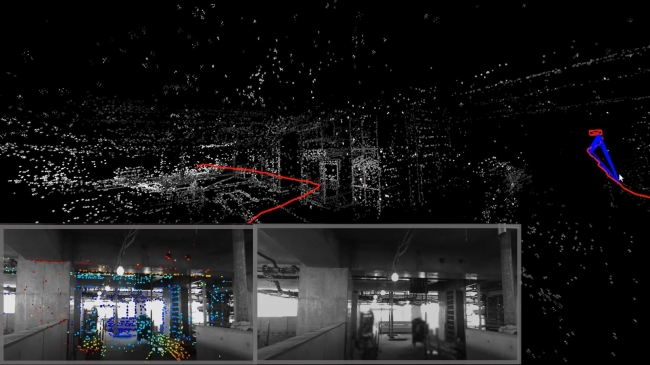
このデータをBIMデータと組み合わせることで、現場の様子をVR上に再現。続いて、穿孔箇所の位置決めをVR空間を通じて行い、穿孔作業をロボットに実行させる。
SE4の技術における最大の特徴は、全ての工程をロボットによって自動化させるのではなく、あえて人が介在する点。ロボットは、位置や距離等特定の物事の分析や重労働を実行する点においては人間よりも優れているのに対し、臨機応変な対応等、物事を総合的且つ柔軟に判断する点においては人間に及ばない。

そこでSE4の技術では、ロボットと人間それぞれの強みを活かし、ロボットに優位な現場空間のスキャニング・マップの生成・穿孔作業は自動化し、より柔軟な判断が求められる位置決め作業の最終確認やそれに伴う微調整は、ロボットの収集したデータを基に人間が行うようにすることで、作業効率を最大化する。また、作業者は一対一の操作ではなく、ロボットへ「指示」をまとめて送信するため、複数のロボット・現場を同時に管理することが可能。
人とロボットが協働する未来を目指して技術開発に取り組むSE4においては、今後自社技術を宇宙でのインフラ構築に利用することを目標にしており、現在地球上のあらゆる環境で実証実験を開始している。今回の空間認識技術とロボット制御技術における精度の向上は、将来の宇宙での利用に向けた大きな一歩となるという。同社は実証実験において新たに得られたデータをもとに、さらなる技術革新に向け開発を進めていくとしている。
SE4



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
山田 航也PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

