
株式会社東芝(以下東芝)が、複数のセンサーを連携させて自車両の動きを高精度に推定する「自車両の動き推定AI」と、様々な交通シーンで周辺車両の将来の動きを予測する「他車両の動き予測AI」の2つのAIを開発した。自動車やドローンの自動運転に適用可能なAI技術で、公開データを用いた実験では、推定結果と実距離の誤差が従来技術にくらべて40%削減されており、両AI技術において世界最高精度を達成したという。
6月1日にオンライン開催されたICRA(International Conference on Robotics and Automation )で発表した。
今回発表されたAIの特徴とは
人間が周囲の動きを推定して行動しているのと同様に、AIによる自動車の安全走行にも自車両の動きの正確な推定と、他車両の将来の動きを正確に予測する技術が不可欠だ。
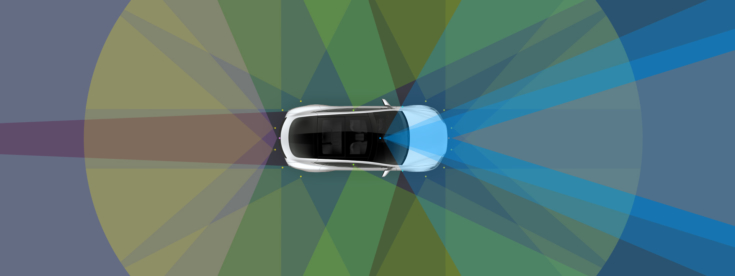
現在の運転支援システムにおいては、LiDARやGPS等のセンサを用いて自車両の動きを推定する技術が開発されているが、高価であったり、周辺の建物等によっては衛星からの電波が届かず計測ができないといった課題がある。
また、他車両の将来の動きを高精度に予測するためには、周辺道路の車線数や曲率などの道路形状に合わせてそれぞれ予測AIモデルを用意する必要があり、様々な交通シーンや車両の動きが想定される一般道への対応が難しいという課題があった。
しかし、今回開発された技術は、安価に手に入り、電波等の環境に依存しない車載カメラと慣性センサを用いた自車両の動きを推定しているという。また、他車両の動きに関しても、道路形状毎の予測AIモデルを作ることなく他車両の将来の動きを高精度に予測しているのが特徴だ。
安価な複数センサを組み合わせる
「自車両の動き推定AI」は、車載カメラ画像から周囲環境の3次元空間地図の生成と車両位置の推定を同時に行うSLAM技術(Simultaneous Localization and Mapping)をベースにしている。
SLAMに関してはロボット系でもよく使われているのでご存知の読者も多いと思うが、自動運転車においては加速度センサや角速度センサといった慣性センサをSLAMに適用すると、高速道路など、「車速が一定でセンサ値に変化がない」状況ではセンサのノイズが有効な信号より大きくなってしまい、推定精度に悪影響を及ぼすという問題が有った。
そこで、今回は車両の動きに応じて画像(カメラ)、加速度センサ、角速度センサごとのデータの有用性を各時刻で判定し、変化がある有効なセンサだけを適宜組み合わせて車両の動きを推定する手法を開発したのだという。
このAIが、様々な車両の動きに応じて各センサの有用度を算出、組み合わせて自己位置を推定するため、高速道路上の車両のようにセンサ入力値への変化が小さなシーンから、ドローンのような加減速の大きい動き方までカバーすることが出来ると言う。
おそらく、この技術が進化すれば、自動車などでも車両が突然コントロールを失ってしまうようなシーン(大抵は事故に直結する)においても威力を発揮するはずだ。
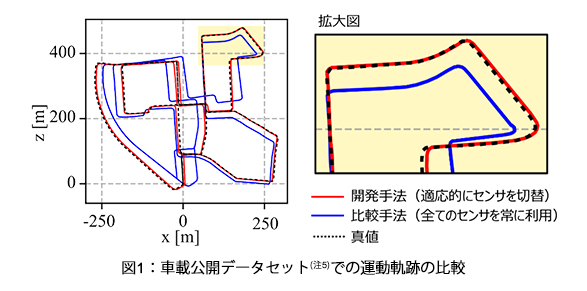
なお、公開されているデータセットを用いて検証したところ、カメラと慣性センサから得られるデータをもとに推定する従来手法に比べて誤差を40%低減し、カメラのみを用いた場合との比較では誤差を82%低減し、真値の軌跡とほぼ一致する結果を確認したという。
ディープラーニングで形状を一般化した道路上で、他車両の動きを予測
他車両の動き予想に関しては従来の手法では、周辺道路の車線数や曲率などの道路形状に合わせて他車両の動きを予測するAIモデルを用意する必要があった。
しかし、この手法では道路形状をディープラーニングを用いて一般化しており、実際の道路の形状に依存しないAIが実現できているため、一般道のような多様なシーンにおいても利用可能だ。
また、予測の手法に関しても、各車線ごとの動きの予測に加えて、「将来走行する可能性の高い車線」も予測する2段階構成を取ることで多様な道路形状に対応して高精度な予測を実現できると言う。
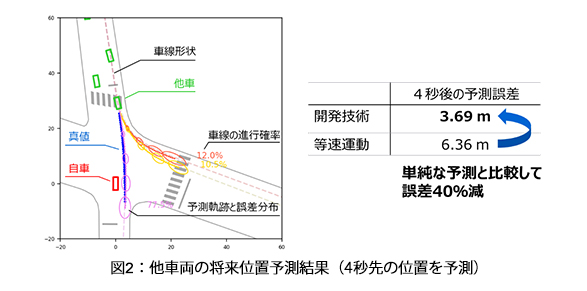
なお、公開されているデータセットを用いた実験では、他車両の将来位置予測(4秒先の位置の予測)において、従来手法と比較して誤差を40%以上削減し、世界最高精度を達成した。
東芝は今後、今回開発した技術を公道など実際の環境で評価を行い、2023年度の実用化を目指していくという。
個人的な見解だが、今回発表された技術は安価なセンサを協調させることで性能をより引き出したり、モデル製作コストを低減させるなど、自動運転システムの低コスト化に寄与するものといえる。
この技術が実用化されることで、自動運転システムはより安価になり、ことによれば、後付け可能な普及モデルなども実現していくのではないだろうか。
自動運転システムが標準搭載された新車は今後増えていくことが予想されるが、自動車のライフサイクルから考えると現存している車両にも搭載可能な安価なシステムが開発されることは「自動運転社会」実現の大きな後押しになるだろう。
今後も東芝のAI技術の進歩がどのように自動運転社会に寄与していくのかを注目していきしたい。



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
梅田 正人PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

