
ヴイストンより好評発売中の学習用ロボット「アーム アカデミック スカラロボット」をROSに対応させるSDKがGitHub上で無償配布される。
SDKはアカデミック スカラロボットを接続したPCに導入して使用する。アカデミック スカラロボットとSDKを組み合わせて使うことにより、ROSの基本的な仕組みやROSのハードウェア対応について実感的に学習できる他、ロボットアームの特長を生かした順運動学・逆運動学の学習や「姿勢の指定」・「姿勢の取得」を利用した外部デバイスからのアームの制御、外部デバイスとの協調動作などを学ぶことが可能。
ヴイストン株式会社は水平多関節ロボット「アーム アカデミック スカラロボット」をROSに対応させる、「アカデミック スカラロボット ROS対応SDK」の無償配布を開始することを発表した。
さまざまなツールやシミュレータでの利用が可能
SDKを用いることで広く用いられるROS関連ツールやシミュレーターにアカデミック スカラロボットを対応させることができる。SDKにはrvizでの3Dモデルデータを含むため、rvizでのロボットモデル表示やGazeboによるシミュレーション、MoveItによるシミュレーションや制御なども可能。
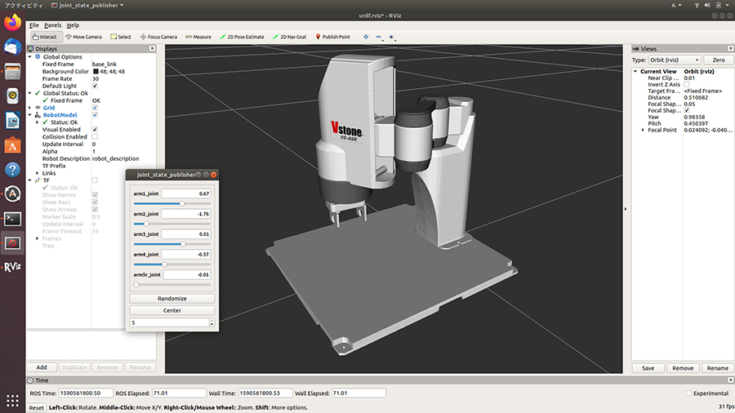
rvizでの3Dモデル表示例
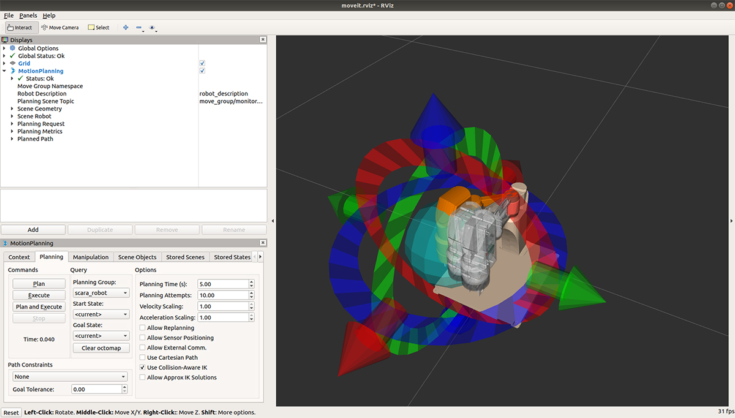
MoveItでのアーム先端座標経路の自動算出例
ROSの総合的な学習のためには、制御などのソフトウェア側と実際に稼働させるハードウェア側とを両輪で理解する必要がある。同SDKと卓上サイズで安全なロボットアームを使うことにより、効率的で実用的なROS学習が実現する。
■SDKの推奨動作環境
OS:Ubuntu18.04 (64bit)
ROS:ROS Melodic
CPU:Intel Core i5 8259U
メモリ:DDR4 PC4-19200 8GB
ストレージ:M.2 SSD 256GB
グラフィック:Intel Iris Plus Graphics 655
OS:Ubuntu18.04 (64bit)
ROS:ROS Melodic
CPU:Intel Core i5 8259U
メモリ:DDR4 PC4-19200 8GB
ストレージ:M.2 SSD 256GB
グラフィック:Intel Iris Plus Graphics 655
関連記事
ヴイストン株式会社 関連記事
ヴイストン株式会社 関連記事



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
山田 航也PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

