
東大発AIベンチャーであるTRUST SMITH株式会社は、自動運転トラックを活用した工場敷地内における自動搬送ソリューションの開発を開始したことを発表した。
自動運転トラックはレーザレーダ、カメラ、GNSSなどの環境センサを利用して、自車位置や周囲物体を認識しながら、倉庫内での自律走行が可能となる。開発においては、名古屋大学等で開発された自動運転システム用オープンソースソフトウェア「Autoware」を活用する予定。
同社は、これまで自社開発した様々な工場向けソリューションに加え、自動搬送トラックを組み合わせることで、完全自動化のスマートファクトリーの実現を推進していく。
製造業で加速するスマートファクトリー化
スマートファクトリーとは工場内のあらゆる機器や設備、工場内で行う人の作業などのデータをIoT(モノのインターネット)などを活用して取得・収集し、このデータを分析・活用することで新たな付加価値を生み出せるようにする工場のこと。製造業ではこのスマートファクトリー化への取り組みが加速している。
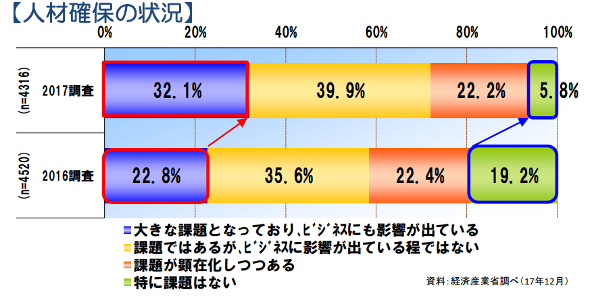
日本でスマートファクトリー化が加速する理由として大きいのが「人手不足」への対応がある。経済産業省が毎年発行している「ものづくり白書」の2018年版によると、人材確保について「大きな課題となっており、ビジネスにも影響が出ている」という回答者の比率は前年の22.8%から32.1%と大きく増加している。
こうした背景から、「自動機やロボットの導入による自動化・省人化」や「IT・IoT・ビッグデータ・AIなどの活用による生産工程の合理化」などをはじめとした「スマートファクトリー化」が本格的に加速し始めた。
TRUST SMITHはこれまで、工場の自動化に関する様々なソリューションの開発を続けてきた。今回開発する自動搬送トラックはこれまでの知見を生かし、製造業や運送業のパートナーと共に、実用化に向けた実証実験を進めていく方針。
TRUST SMITHの関連技術
TRUST SMITHはこれまで自社開発した様々な工場向けソリューションに加え、自動搬送トラックを組み合わせることで、完全自動化のスマートファクトリーの実現を推進していく。
以下は、TRUST SMITHがこれまでに発表したソリューションの一部。
障害物回避型ロボットアーム
空間内に存在する障害物を回避し、目的物へアプローチすることができるアルゴリズムを搭載。これまで手作業で行っていたとされる工場などでのピックアップ作業を自動で行えるようになり、製造業全体での大幅な省力化とコストカットが期待できる。

自律走行型AGV、律走行型フォークリフトのアルゴリズム
ロボット自身が前後左右や路面の凹凸、段差などを検知して、目的とする場所まで自律走行し移動するタイプの物流ロボット。作業者が荷物を積載すると、ロボットが自動で運搬する。作業者の移動量を大幅に低減でき、搬送作業における生産性向上が期待できる。

従来のAGVは磁気テープや磁気棒などのガイドを予め施設の床下に埋め込むことで、施設内の決められたルートのみを走行する。
同社が開発した自動搬送ロボットはセンサーにより空間の障害物等を認識・回避しながら施設内を自由に走行できるため、走行経路上に想定外の障害物等が置かれていたり、歩く作業員がいたとしても自動で安全に回避し、目的地まで到達することが可能。

画像処理の技術を活用した工場機械の異常検知AI
画像認識技術を用いて自動で異常検知を行うAI。工場における機械の故障等といった異常をいち早く発見し、生産効率の向上や効率の良いメンテナンスを実現。工場内の機械の異常検知などに応用できる。

東大発AIベンチャーTRUST SMITHが「ティーチング不要のアームロボット制御AIアルゴリズム」の提供を開始
【東大発AIベンチャー企業】自律走行できるAI自動搬送ロボットを開発 倉庫・工場・病院等の搬送作業の効率化に TRUST SMITH
東大発のAIベンチャー、障害物回避型アームのアルゴリズム開発に成功 製造業や農業、小売業などで省力化とコスト削減に期待
TRUST SMITH株式会社 関連記事
TRUST SMITH



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
山田 航也PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

