
NVIDIAは6月17日にIsaac SIM 2020.1とそれに対応したNVIDIA Isaac SDK2020.1をリリースしたことを発表した。Isaac SIM 2020.1は限られた数の申請者が利用できる早期アクセスプログラムに登録するとダウンロードできる。
3D仮想空間シミュレータIsaac SIM 2020.1は、ロボット工学用のオムニバースKitを搭載した3D仮想空間シミュレータ。開発者には仮想ロボットの世界と実験を構築するための機能が提供され、ロボットは仮想センサーでシミュレートできる。Isaac SDK 2020.1は、Isaac Sim2020.1のシミュレーションでロボットを開発、トレーニング、およびテストするために必要なツールと手法が含まれている。
知覚とナビゲーションAIをロボットに簡単に追加
NVIDIA Isaac Software Development Kit(SDK)には、Isaac Engine(アプリケーションフレームワーク)、Isaac GEM(高性能ロボットアルゴリズムを含むパッケージ)、Isaac Apps(リファレンスアプリケーション)、Isaac Sim(強力なシミュレーションプラットフォーム)が含まれている。これらのツールとAPIは知覚とナビゲーションのための人工知能(AI)をロボットに簡単に追加できるため、ロボット開発を加速することができる。
Isaac SDKの最新バージョンであるIsaac SDK 2020.1には、協調仮想環境ツールであるOmniverseでIsaac Simを使用したシミュレーションでロボットを開発、トレーニング、およびテストするために必要なツールと手法が含まれている。

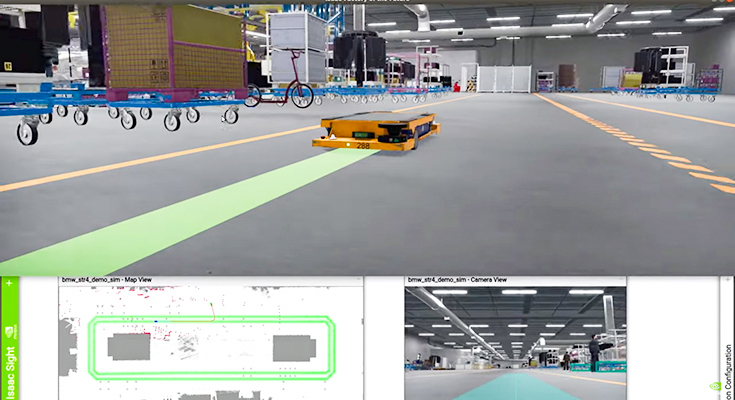
NVIDIAは最近、BMW Groupが、NVIDIA Isaacロボットソフトウェアプラットフォーム上で実行される、統合ソフトウェアアーキテクチャを使用して開発されたAI対応の物流ロボットを実装したことを発表した。Isaac SDK 2020.1にはBMWグループが物流ロボットを開発するのに役立った実績のある機能もすべて含まれている。
Isaac SDK 2020.1の特徴
■マニピュレーションとナビゲーションのための新しいIsaac GEM
・深度画像を使用した、3Dオブジェクトの姿勢推定DNN
・自己位置推定と障害物回避機能を改善するためのマルチLIDARのサポート
・コストマップを備えたナビゲーショングローバルプランナー
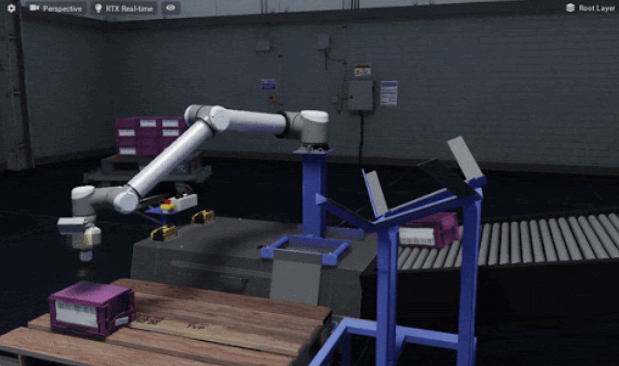
・マニピュレーション向けモーションプランニング
■Isaac Engine用の拡張機能
・IsaacGEMおよびIsaacリファレンス アプリ向けPython API
■Isaac Apps(リファレンス アプリ)
・Laikago 四足歩行によるナビゲーション
・強化学習アプリによるナビゲーション
・Isaac Simを使用した転移学習のためのコンテナー化されたアプリ
3D仮想空間シミュレータの「Isaac Sim 2020.1」
NVIDIA Isaac Sim 2020.1は、ロボット工学用のOmniverse Kitを搭載した3D仮想空間シミュレータ。開発者には仮想ロボットの世界と実験を構築するための機能が提供され、ロボットは仮想センサー(RGB、ステレオ、深度、LIDAR、IMU)でシミュレートできる。Isaac Simのロボットは、Isaac SDKのツールとフレームワークに緊密に結合されているため、物理ロボットと仮想ロボットの間でアルゴリズムとデータを簡単に転送できる。
Omniverse Kitは3D仮想空間でシミュレートするためのNVIDIAの最先端のプラットフォーム。リアルタイムの高品質マルチGPUレイトレーシングとパストレーシングにより、複雑な3Dワールドの高忠実度シミュレーションを実現。安定して高速なGPUの物理演算を可能とし、物理ベースのレンダリング用のMDLマテリアルをサポートする。
Isaac Sim 2020.1の特徴
■Omniverse Kitでのシミュレーション テクノロジ
・パス及びレイトレーシング機能による NVIDIA RTXのフォトリアリズム
・物理学に基づくレンダリングのための MDL マテリアル
・NVIDIA PhysX および Python スクリプト API
・クラウドまたはワークステーションで動作
■ナビゲーションとマニピュレーションをサポートする機能
・RGB-D、Lidar、IMU センサー
・グラウンド トゥルース:セグメンテーションと バウンダリー ボックス、衝突、接触、ステート
・ドメインのランダム化
・Isaac SDKとROSの統合
■Omniverse Nucleusモデル
・倉庫、工場、オフィスなどの環境シミュレーション
・ニピュレーション、ナビゲーション、四足歩行のロボットシミュレーションモデル
■Omniverse Connect 向けプラグイン
・Maya、Revit、SketchUp、Rhino、Unreal Engine 4のプラグインを通じて、ロボットシーンのモデリングを容易にする。
BMWがNVIDIAの「Isaac」シミュレータを採用、スマート工場ロジスティクスを強化するAIロボットを開発中
NVIDIAがロボット開発向け3D環境シミュレータ「Isaac Sim」をリリース ロボットの動き、AI認識、センサーなどを仮想空間でテスト
NVIDIAのロボティクス開発者向けの無料ツールボックス「NVIDIA Isaac SDK」を4月から一般向けに提供開始



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
山田 航也PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

