自動運転技術において、最も重要なセンサーのひとつがレーザー光を使って周囲の人、モノ、地形などを検知するLiDAR(Light Detection And Ranging:ライダー)だ。LiDARの高性能化と小型化、低価格化が、自動運転車の実現と普及の大きなカギを握っている。
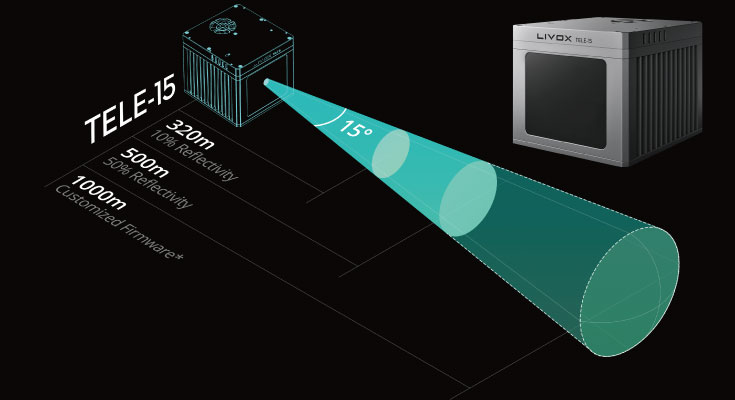
DJI JAPAN株式会社は、自動運転向けの長距離検出用LiDAR「Livox Tele-15」をグローバル向けに出荷開始したことを発表した。反射率が50%の対象物は500m先まで検出でき、カスタムファームウェアのサポートで最大1,000メートルに拡大させることも可能だという。
開発はDJIの子会社のLivox Technology Company(Livox)。「Tele-15」は今年ラスベガスで開催されたCES2020での発表以来、1000mという最大検出距離と、その性能にしては発売された価格が安かったことで多大な関心を集めていた。発売時は税込148,000円となる。

Livox Tele-15の特徴
Livox Tele-15の特徴は大きく分けて3つ。
・高速で長距離検出を可能にするレーザー技術
・可動部品を減らした高信頼性設計
・大量生産を前提にしたモジュール化とパッケージ技術
それぞれについて簡単に紹介していこう。
長距離検出を可能にするレーザー技術
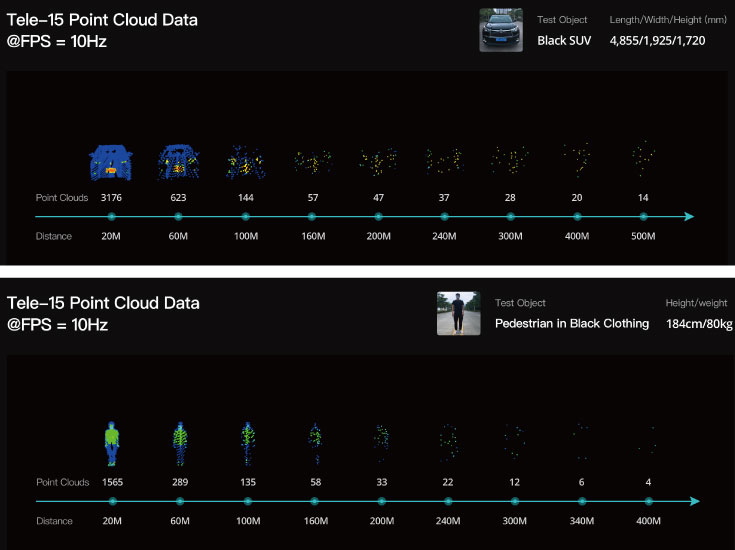
Tele-15の特徴は遠距離での物体検出だ。
そのための前提として、レーザー光を鋭く絞っておく必要がある。
絞りが甘いレーザーでは距離が遠くなればなるほどレーザー光が広がってしまい、遠距離での物体検出が難しくなってしまうためだ。
Tele-15では、0.03°の角度精度、0.12°(垂直)× 0.02°(水平)とビーム発散角度を小さく絞ることで遠距離においても高精細な点群データを得ることが可能になっている。
その結果反射率対象の反射率が10%程度であれば最大検出範囲は320m。通常であれば500m。ファームウェアをカスタマイズすることで制限範囲を最大1000mまで拡張することも可能だ。
また、スキャン方法に関しても独特だ。
LiDARのスキャンというと、一般的なイメージは水平方向にレーザーを走査させる反復リニア走査パターンだろう。この方式では走査する複数のレーザーの間にあるデータは取得できないという問題がある。
しかし、Livoxではプリズムを回転させることで花のような独特の文様を描く独特のスキャン:非反復走査を行っている。
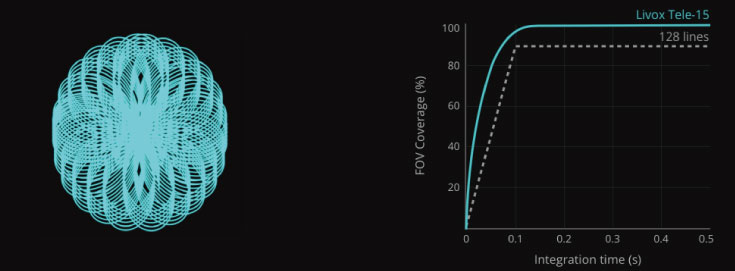
この非反復走査パターンでは、積分時間をあげることでFOV(視界)内の走査率を上げることが可能で、Tele-15では約0.1秒でFOV内の99.8%のFOV範囲を走査出来ると言う。これはリニア走査パターン(走査線数128本)で走査を完了する際にかかるのとほぼ同じ時間だ。(右グラフ参照)
可動部品を減らした高信頼性設計
車載部品製造は厳しいは耐候性や耐振動性などのハードルの高さにある。
Tele-15は「無回転光電子部品を用いた革新的な光電子工学システム設計を採用」とうたっているように、コアとなるレーザー発振器やセンサー部などに回転部品がない。
先程の非反復走査もプリズム部の回転によって行っているため、振動や温度変化に対しても、非常に強いのだという。
規格としてはISO16750(自動車部品向け国際規格)やVW80000(フォルクスワーゲングループ向け規格)をクリアし、平均故障時間(MTTF)は40,000時間。車両寿命要件で言えば10年という製品寿命は自動運転レベル3,4の要件を満たしているのだという。

大量生産を前提にしたモジュール化とパッケージ技術
LiDARは高額な部品だが、その原因の一つが組み立て、調整の難しさだ。実装時の歩留まりを高めることが難しく、ミラーやレンズの組立ラインに習熟した技術者が必要だったことが高いコストの原因となっていた。
しかし、Livoxでは多重レーザー、及び多重APD(アバランシェフォトダイオード)をまとめてパッケージするDL-Pack技術を採用し、モジュール化をすすめることで高い生産性を実現。またセンサーのキャリブレーショ工程の自動化やマニュアルフォーカスの調整工程の削減などで量産性が上がったと言う。
SDKや内蔵慣性センサーなどによる高度なソリューションも
Tele-15にはBMI088 IMUが内蔵、機体の動きを補償したり、SLAM等のアルゴリズムを実装することが容易になっている。
また、SDKはLinux/Windows/ROS、C/C++/Pythonなどに対応。様々なプラットフォームでの利用がしやすくなった。
Livoxはこれまでに、HorizonやMidシリーズなど検知範囲260mクラスのLiDARを販売している。他のメーカーでも検知範囲はおおよそ250mほどだ。これは高速道路などで乗用車などが対面しあうシーンであっても1秒間に進むことができる距離が150m程(互いに250km/hで走っていた場合)しかないためだろう。
そう考えると、予想されるのソリューションとしては一般的な速度で走行する自動運転よりも「反応速度が低い」系か、速度とは関係なく純粋に広範囲をスキャンしたい用途に適していることになる。
例えば、オーストラリア内陸部などに見られるようなロードトレイン(5-6台のトレーラーを連結したもの)などの自動化などが考えられるだろう。
広範囲をドローンで3Dモデリングし、SLAM用の地図を作る等の用途にも使えそうだ。
今後ますます広がっていく自動運転車への需要。それに向けて多様なセンサーが開発されていくことが予想される。
その中でも目とも言える重要なセンサーLiDARの進化は、自動運転車の実用化の核心部分とも言えるだけに、今後ロボスタのなかでも詳報を追っていきたい。
製品仕様
| モデル | Tele-15 |
|---|---|
| レーザー波長 | 905 nm |
| 安全等級 | クラス 1 @ IEC60825-1:2014 |
| 範囲(@100 キロ ルクス) | 260 m @ 反射率10% 500 m @ 反射率80% |
| FOV | 15° 円形 |
| 距離精度(1σ @ 20m) | 2 cm |
| 角度精度) | < 0.03° |
| ビーム発散 | 0.12° (垂直) × 0.02° (水平) |
| データサイズ | 240,000 点/秒(480,000 点/秒 デュアルリターン) |
| FOVカバー率 | 99.8% @ 0.1秒 |
| 誤警報率(@100 キロ ルクス) | < 0.01% |
| 動作環境温度 | -40℃ ~ 85℃ |
| IP等級 | IP67 |
| 電力: | 12 W 標準値 |
| 電圧 | 10 ~ 16 V DC(標準12 V DC) |
| インターフェース | イーサネット |
| データの同期 | IEEE 1588-2008 (PTPv2)、PPS (パルス毎秒) |
| サイズ | 112×122×95 mm/1600 g |
距離精度: 25°Cの環境下で測定(対象物からの距離20mおよび反射率80%)。特定の指標は測定条件に依存します。実際の計測結果と異なる場合があります。
FOVカバー率: 詳細については、ユーザーマニュアルをお読みください。
誤警報率: 誤警報の比率は、100キロルクスの照度条件下での周囲の迷光によって生成されます。
電力: 起動出力(特に、低温環境下の場合)は、標準出力よりもかなりに大きい場合があります。詳細については、ユーザーマニュアルをご参照ください。
Livox Technology Company Limitedは、DJIのOpen Innovation Programから誕生、2016年に設立された独立企業。 Livoxは、従来のLIDARユニットの数分の一、または数十分の一のコストで高いパフォーマンスのLiDARセンサーを提供し、LiDAR業界で高い注目を集めている。 アプリケーションへの統合を容易にできる製品を低価格に提供することで、自動運転、スマートシティ、マッピング、モバイルロボットなどの産業分野をサポートしている。 現在、カナダ、中国、EU、日本、米国を含む世界30か国以上で製品を展開中。



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
梅田 正人PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

