

パナソニック プロダクションエンジニアリング株式会社は、2020年10月27日、追従型ロボティックモビリティ「PiiMo(ピーモ)」の販売を11月から開始すると発表し、オンライン記者会見を行った。WHILL株式会社の電動車椅子「Model C」に、パナソニックのセンシング技術や自動追従技術等を追加搭載して製品化した。
(リリース:https://news.panasonic.com/jp/press/data/2020/10/jn201027-1/jn201027-1.html)
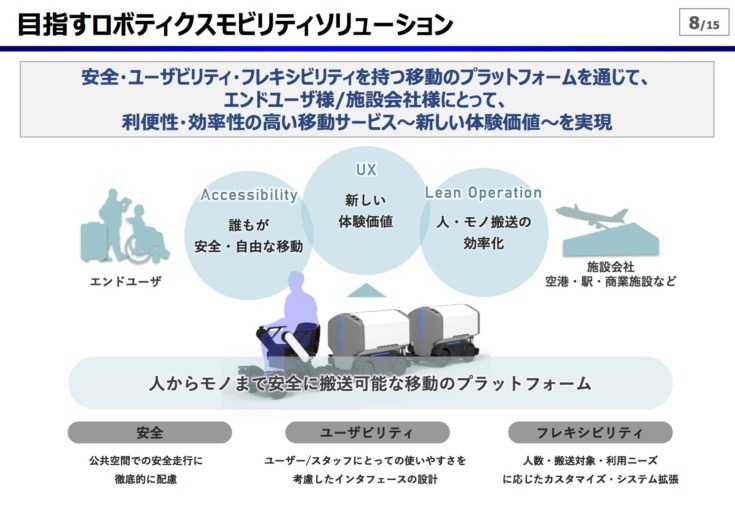
個人向けではなく、主に自動走行・センシング・追従をうまく適用できる空港や駅、商業施設などを対象に、安全に走行可能なプラットフォームとして提供する。価格は一台あたり300〜400万円を想定。販売目標は2023年度に100台。現場で効率的かつサービスレベルを落とさないモビリティを実現し、新たな移動価値を提供できるものだという。
WHILLにパナソニックの技術を搭載して製品化

会見では、パナソニック プロダクションエンジニアリング株式会社 代表取締役社長の柳本努氏が初めにロボティックモビリティの取り組みについて紹介した。パナソニックは「技術10年ビジョン」を掲げており、そのなかのひとつとしてロボット技術も重視している。今回主体となるパナソニックプロダクションエンジニアリング株式会社(PPE)は、12の技術領域を活用して5つの事業領域でビジネスを行なっている。

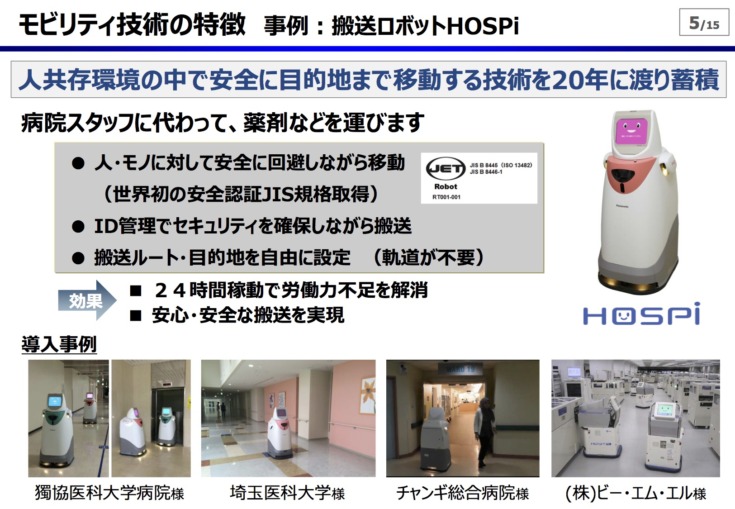
パナソニックのモビリティとしては病院内搬送ロボット「ホスピー」がある。20年以上開発・蓄積されてきた技術で、人・モノに対して安全に行動することができるとされ、安全認証のJIS規格も取得している。特徴は特定のガイドテープなどを必要としない無軌道で移動できること。
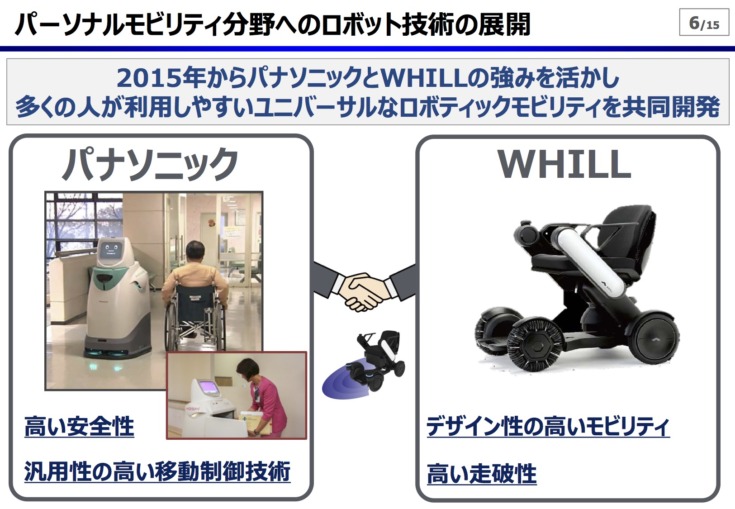
今回の「PiiMo」は「ホスピー」の技術と、スタイリッシュで走破性の高い電動車椅子を開発・販売する「WHILL(ウイル)」の技術を用いたもの。両社は2015年から共同開発を行ってきており、今回、センシングや自動追従技術などをWHILLのモビリティに搭載して商品化した。狭いところでも小回りがきき、決して先頭車両を見失わないという。
完全無人ではなく、人が介入するモビリティサービス
詳細は、PPE ロボティックモビリティプロジェクト プロジェクトリーダーの安藤健氏が紹介した。「PiiMo」はロボティックモビリティだが、完全無人ではなくある程度人が介入するサービスのなかでの移動支援業務への省力化、より良い移動体験を狙っている。
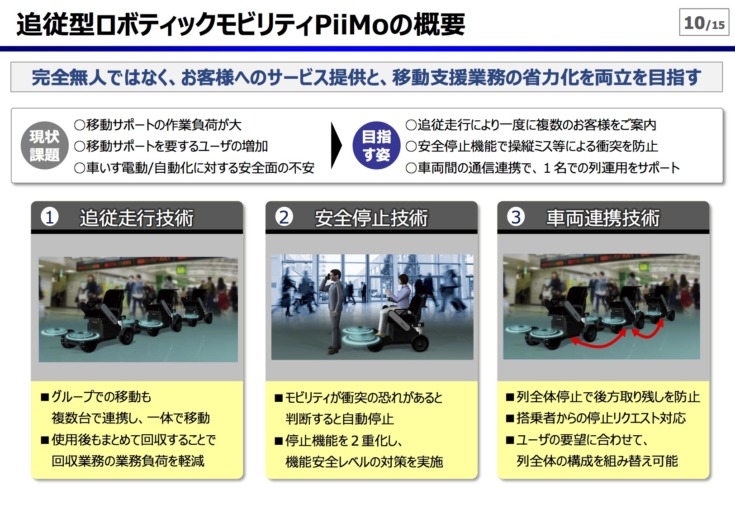
コアとなる技術は3つ。追従走行、安全停止、車両連携である。技術だけではなく、ユーザーと長期実証実験を行いながら開発を進めてきた点が特徴だという。「PiiMo」は重量70kg、最高時速は4km。この最高時速についても実際の屋内施設で評価しながら決めていったという。人混みのなかでも走れることは検証済みだ。

「PiiMo」は隊列走行ができるが、二台目以降は前方につけられたレーザーセンサーを使って、機体後部につけられた追従用のマーカーを検出して動く。1台目は自動運転ではなく、あくまでスタッフがジョイスティックで操作することを前提としている。こうすることで、顧客接点は維持しながら三台まとめて操作することができる。

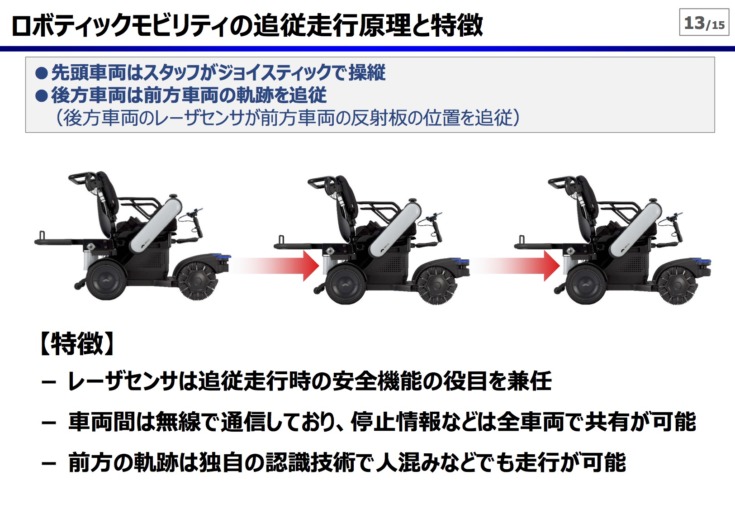
安藤氏は実際の走行技術について、10台が追従走行する様子を示した。このような追従を行わせると、多くの技術ではだんだんずれていってしまうが、「PiiMo」は先行車の経路を正確に認識してついていけるので、ブレることがない。また、突発的な障害物があっても安全に停止することができる。

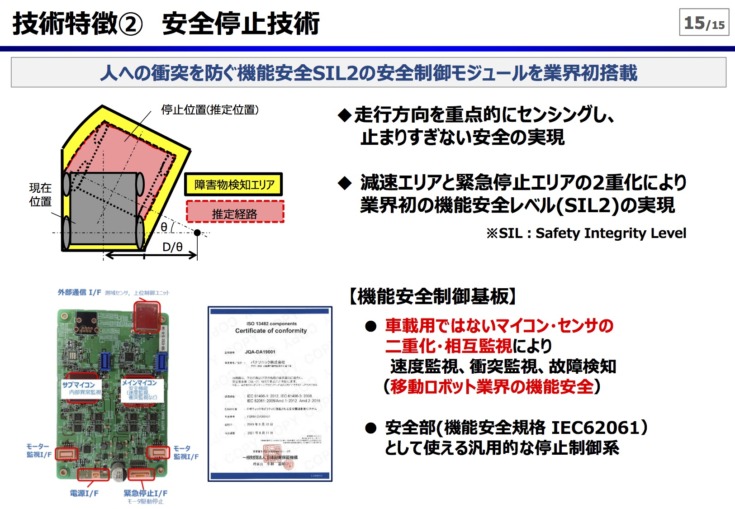
安全性を重視して単に止まるだけでは移動効率が上がらない。「PiiMo」は走行方向を常に推定しながら重点的にセンシングを行うことで、「止まりすぎない安全性」を実現した。また2019年12月には機能安全に関する国際規格であるIEC62061の適合証明を取得した。安価なセンサーを二重化して相互監視させることにより業界初の機能安全を実現したものだという。
長期実証で現場オペレーションに必要な機能を開発
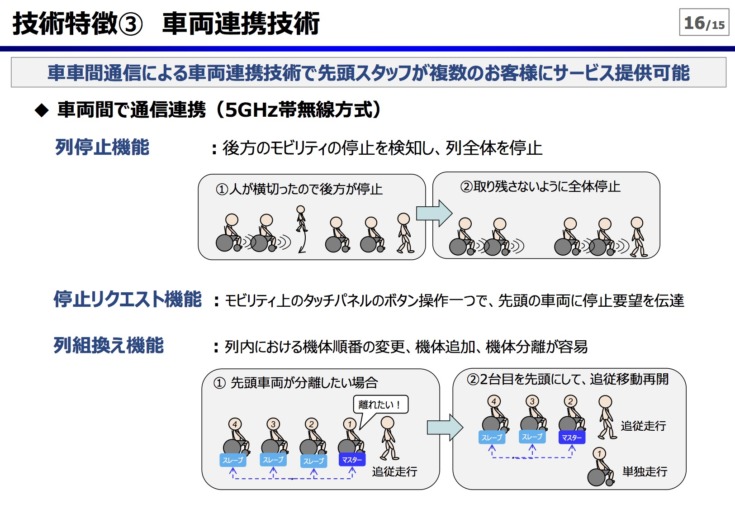
単なる追従ではなく車車間通信機能も特徴だ。隊列を組んで移動しているときに真ん中を人が横切ると、その後ろのモビリティは停止するが、そのままだと前方が進み続け、後方は取り残されてしまう。そこで取り残されないように列全体が止まる仕組みを実現した。
また、列組み替え機能も実装した。これは長期実証のなかで必要であるとわかったもので、たとえば隊列のなかの一人が途中でお手洗いに行きたくなるなどの理由で、抜けたくなることがある。その場合にスムーズに列を組み替える機能で、たとえば4台の隊列を三台にスムーズに組み替えることができる。
安藤氏は実証実験でわかったこととして、「追従走行だけでは現場オペレーションはできない」と語った。たとえばエレベーターに乗るときには一台一台を別途扱う必要がある。そういう場合には本体座席上についたレバーを下げると手押しで操作できる。このような機能をつけることで現場のオペレーションが便利になる。

また、単体でもリモコン操作が可能だ。リモコン操作することで、モビリティに乗った人の横に並んで話をしながら操作をするといったことも可能になる。停止機能についても単に止まるだけではなく2段階停止機能があり、いったん止まったあとに前進させると、すぐ近くまで寄ることができる。こうすることで飲み物などの受け渡しができる。安藤氏は、実証実験を通して現場オペレーションに必要な機能を開発したと語った。

隊列間隔については速度にも依存するが、基本的には約1.5mから3mくらいまで対応可能。この間隔についても試行錯誤的なトライアルを繰り返して、搭乗者が前方車にぶつかる懸念をもたず、かつ、隊列間に人が入りにくい距離間隔として見出したとのこと。
なお、WHILL社でも独自に自律移動を開発しているが、それとは別物という位置付け。顧客も完全自動がいいというタイプと、人が一緒に運用したいというタイプに分かれているという。
■ 動画
川田テクノロジーズ



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
森山 和道PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

