

九州工業大学ニューロモルフィックAIハードウェア研究センターは2021年4月30日、「第4回Neumorphセミナー」をオンラインで開催し、九工大・北九州高専発スタートアップであるKiQ Robotics株式会社 創業者の一人で、2021年5月現在は同社テクニカルフェローの西田健氏が講演した。
九州工業大学ニューロモルフィックAIハードウェア研究センター(Neumorphセンター)は、マテリアルがもつ潜在的演算能力「マテリアル知能」を活用した超高効率・高性能な「ニューロモルフィックAIハードウェア」の研究開発の推進を目的とした研究センター。脳科学の知見を生かした脳型ハードウェア研究や、現在のAIシステムを超越する次世代システムの実現を目指している。
■動画
西田健氏は九州工業大学大学院准教授を経て、2019年4月にKiQ Roboticsを創業。取締役CTO、COOを務めた。2021年5月からはKiQ Robotics テクニカルフェロー、そしてロボットとAIの受託開発や技術コンサルティングを行うNishida Labの代表として活動している。西田氏は講演に先立ち「次の生産ステップはこうあるべきだと提案をしたい」と語った。
マスカスタマイゼーションのためには自動化まったなし

西田氏は「リバーシブル・オートメーション 多品種生産に求められるAIとロボット」と題して講演した。「リバーシブル・オートメーション」とは「可逆のオートメーション」という意味を込めた、西田氏の造語。西田氏は現在の製造業を取り巻く社会情勢や技術課題を総括したあと、成し遂げるべき技術課題を示した。
いま生産現場は大量生産から多品種生産へ移行する大きな変化の波にさらされている。顧客ニーズは多様化し、コストダウンだけでなく少数ニーズに対する判断機会をどう確保するかが重要になっている。コモディティ化によりハードウェア価値は低下し、価値をどこに置くのかも考える必要がある。受注から生産までの準備期間(リードタイム)の短縮と素早い市場への投入も重要だ。
西田氏は生産革命が目指す未来像は「マスカスタマイゼーション」だと述べた。カスタム製品を大量生産の生産性で実現することで、顧客が望むときに望むものを出すための仕組みである。世界的にも同じ動向が見られる。多様化する顧客ニーズへの対応を生産年齢人口減少のトレンドで実現するためには「インダストリー4.0」のように自動化機器を最適活用したスマートファクトリー、フレキシブルファクトリーの実現が必要になる。
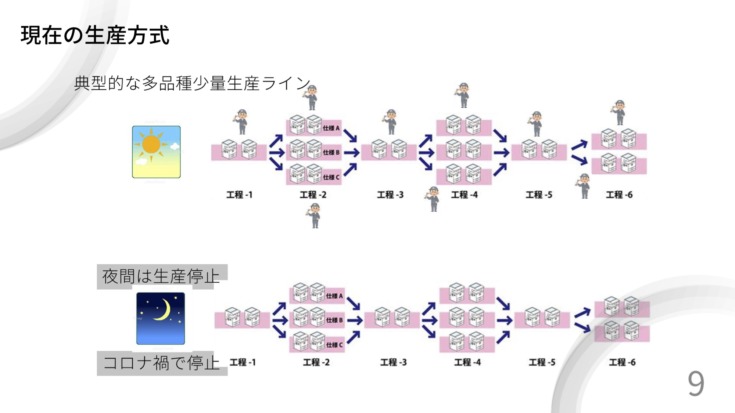
いっぽう現実を見ると、現在の多品種生産の多くは中小企業が担っている。そのような工場を見てみると多くの工程が数珠つなぎに並んでいて多くの機械が連携して使われている。それらの機械の周りには熟練工がついていて、うまく生産機械を使いこなしている。だが人がいなくなると成り立たないので夜間は全停止するし、コロナ禍でも生産が滞ってしまっている。つまり自動機が並んでいる生産現場でも人不在では成り立たない。
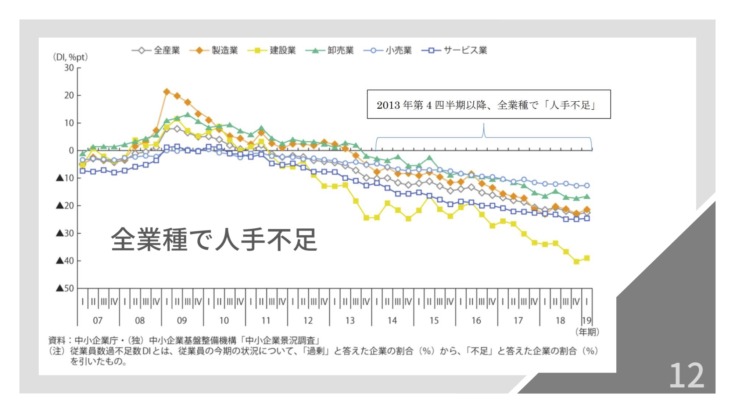
今後の人口減少はものすごいペースで続いていく。全業種が人手不足であり、中小企業にとっては大きな経営課題となっている。人が足りないなかで多品種生産に応えるためには自動化が必要だ。
中小企業には「不可逆な自動化」はハードルが高い
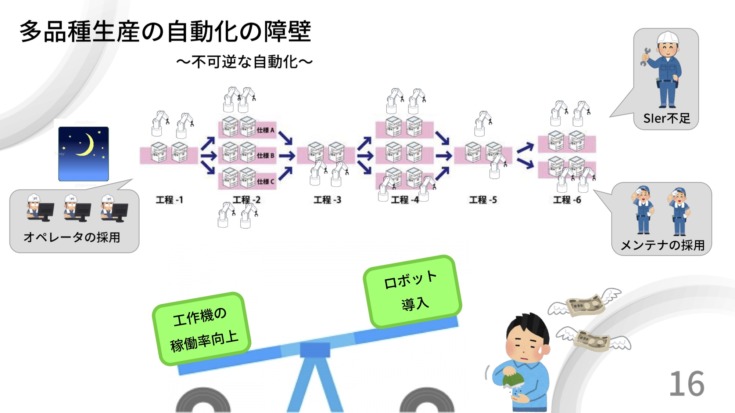
単純には各自動機の前に汎用ロボットを置いて動きが自動的にプログラミングされればいいと考えがちだ。だがそれを中小企業の現場で実現するのは基本的には無理だ。コストが高くつきすぎるし、システム化のためのSIerも人手不足だ。またメンテナンス・運用する人も必要だ。新たな製品を作るためには再プログラミングの必要もあり、そのためのオペレーター採用も必要となる。結局、人が減らない。これでは何の解決にもなってないし、初期投資も大きい。そのため多くの自動化は「不可逆な自動化」になっていると西田氏は指摘した。一度入れたら稼ぎ切るまで戻すという選択肢はない。
他にも自動化導入には様々な壁がある。事前検討が難しい、作業ごとに自動化システムは大きく異なるため場所がない、SIerや運用などのコストが必要であることなどだ。よって、次世代ロボットに対しては、より安く、多品種少量への対応ができ、操作性はよく、プログラミングの容易さなどに関するニーズが高い。

西田氏はクレイトン・クリステンセンの『ジョブ理論』を引用。多くのユーザーは少々の不満足があってもそれは飲み込んでしまって現行のやり方を望むこと、新しいものに乗り換えるのはよほど強い確証がないと無理だという話を紹介した。
可逆な自動化(リバーシブル・オートメーション)へ
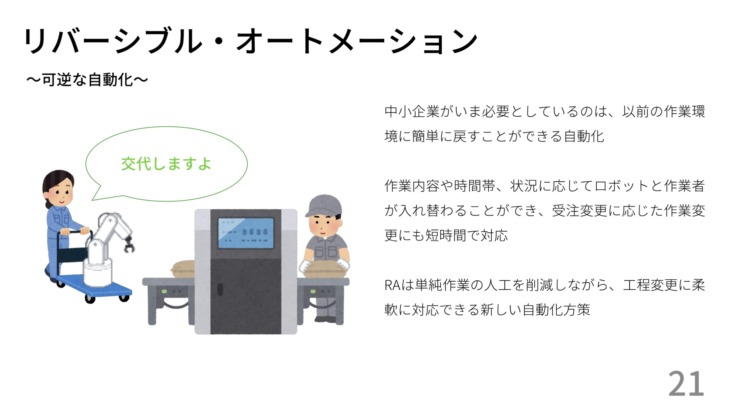
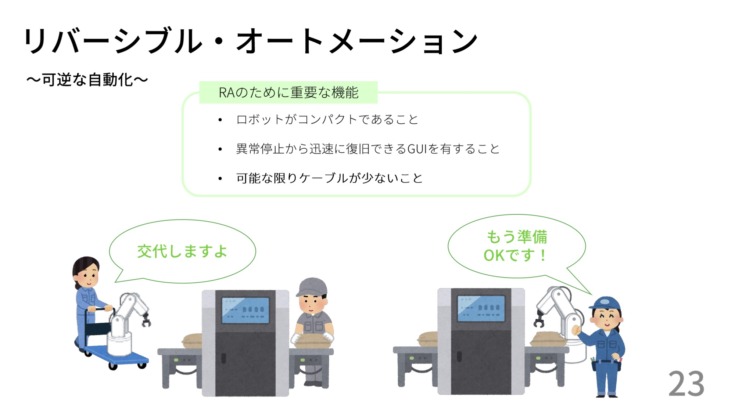
西田氏は「多品種少量生産を行なっている中小企業が必要としているのは可逆な自動化(リバーシブル・オートメーション)だ」と語った。つまり、「ちょっと入れてみる」、「次の現場にも持っていける」、「作業内容や時間帯に応じてロボットと作業者が入れ替わることができる」、こういった産業用ロボットの考え方が必要だという。鍵はショートリードタイム。つまり導入が5分、10分程度で済むようなものでなければならない。ロボットの配置変更、動作プログラム、センサ処理系などを短時間で準備できる機能だ。
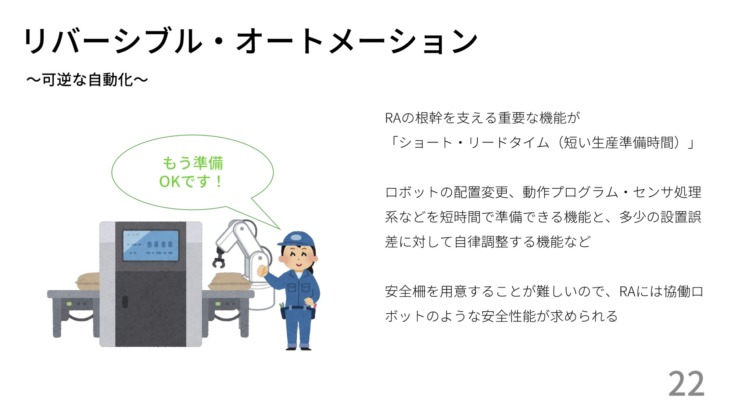
中小企業では安全柵の設置も物理的に難しいので、協働ロボットの利活用が重要となる。ロボット自体コンパクトであり、異常停止から迅速に再起動できること、ささっとチューニングできるGUIなどがあれば、西田氏が言うところのリバーシブル・オートメーションができる。まずは遅くても止まらない、1日のうちある時間帯だけロボットが入るといった使い方がまず第一歩となるという。
次世代の協働ロボットの課題
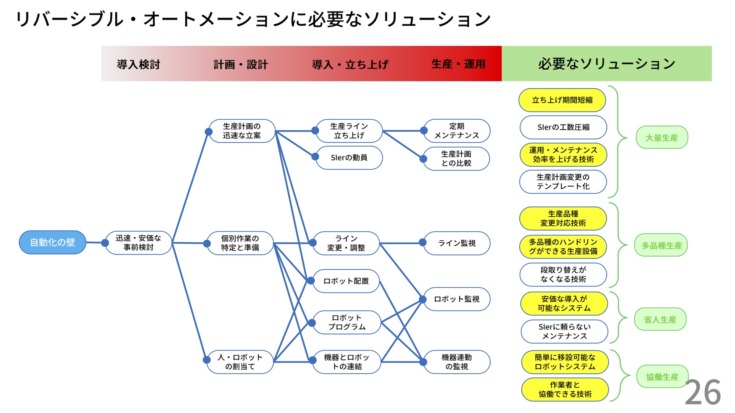
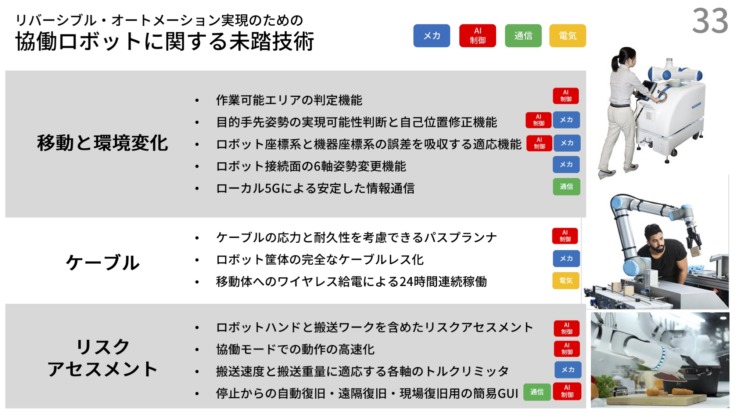
リバーシブル・オートメーションの実現のためには何が必要か。工場に入れるためには導入検討、計画・設計、導入立ち上げ、生産・運用、それぞれに対してやらないといけないことがあり、それぞれに必要なソリューションがある。立ち上げ期間短縮、運用、多品種のハンドリング、コスト、移設可能性、協働などだ。
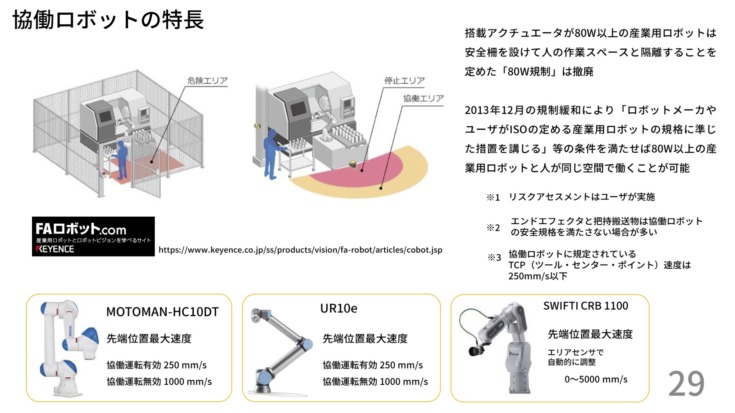
まず協働ロボット。以前は80W規制があったが、2013年に規制緩和されて、リスクアセスメントをユーザーが実施することでロボットが人と空間を共有して動けるようになった。ただしメーカー保証されているのは本体だけでハンド部分はユーザー任せとなっている。
予測では協働ロボットの市場は伸びていくとされており、コストは今後、大幅に下がるとされている。西田氏も「それぞれ使い勝手は違うがコモディティ化はどんどん進んでいく。市場予測以上に爆発的に市場に出回っていくだろう」と見通しを述べた。ソフトウェア面の使いにくさもあるが、ソフトウェアの改善はハードウェアよりも高速で行うことができると見ているという。
また協働ロボットを搭載した台車も出はじめている。自律移動するものもあれば手押しで動かして他のラインに移設できるものもある。こちらも価格もピンキリだだが、中には工作機や周辺危機との接続が用意されているものも 出始めている。
だがまだまだ多くの課題がある。西田氏は作業エリアの判定や環境変化への対応、ケーブル処理、リスクアセスメントなどを挙げた。通常の産業用ロボットは一度設置したらもう動かさない。設置環境も3DCAD上で厳密に設計されている。しかしそれでは可逆自動化はできない。現場ではケーブルの問題も大きい。断線しない耐久性が必要だし、あまり張力を与えないパスプランニングはほとんど研究されてないが重要だ。ワイヤレス給電による連続稼働も必要になる。現場では生産ラインは必ず止まる。素早い復旧も重要である。
ロボットハンドの課題
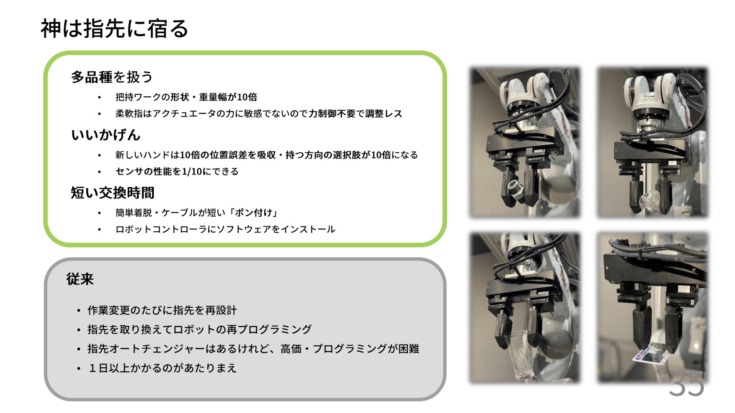
柔軟なロボットハンドはいろんなシーンで求められている。特に多品種を扱うならハンドは重要だ。ロボットアームはつまるところ指先を空間中の好きな場所にもっていくためのツールでしかない。もちろん作り込めば何でも持てるが、柔軟な対応は難しい。吸引が多く使われているが、特に食品系では吸引は難しい。多少のズレを許容してもそれなりに把持してもらいたいというのが現場の希望だろう。短時間で素早く交換ができることも重要だ。
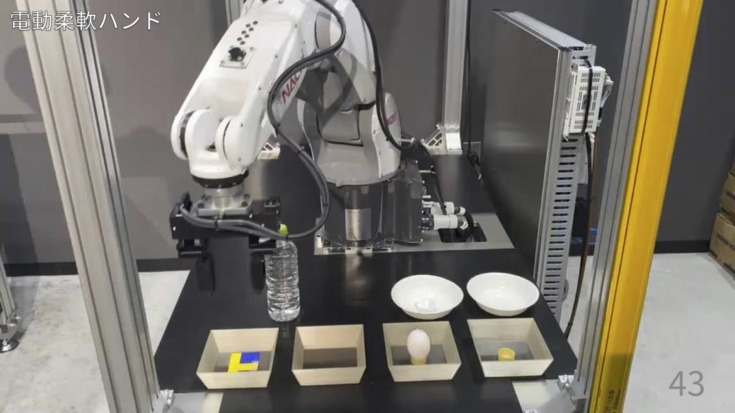
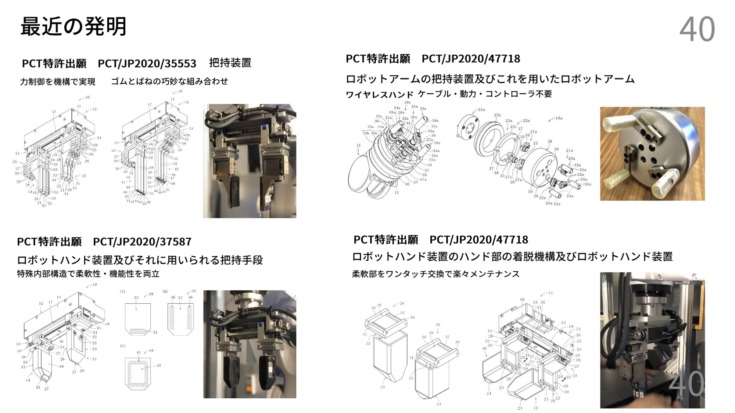
西田氏は以前開発していたMR流体を使ったロボットハンドを紹介した。指先の硬さを磁力で制御することで、うずらの卵や濡れたものも搬送できる。だがコントローラは高くつくので考え方を変えたという。生産ラインでは、まずワークが決まり、その扱う対象に合わせてハンドを決める。さらにそのハンドでワークをどう運ぶかが決まれば、それをやるためのどのような計測を行う必要があるかが決まり、センサーが決まる。最後にそのためのロボットアームが決まる。西田氏はケーブルレス、動力レス、コントローラ不要のハンドを開発している。
西田氏はハンドは柔軟性、力が発揮できること、耐久性能があることの3つが重要だと述べた。物体を把持するためには力拘束と形態拘束を使う必要があり、人間の手はそれをやっている。対象物を包み込んで持つことができれば、多少重心を外しても持てる。ワークの重心を見つけるセンサーのプロセスも一個省ける。
■動画
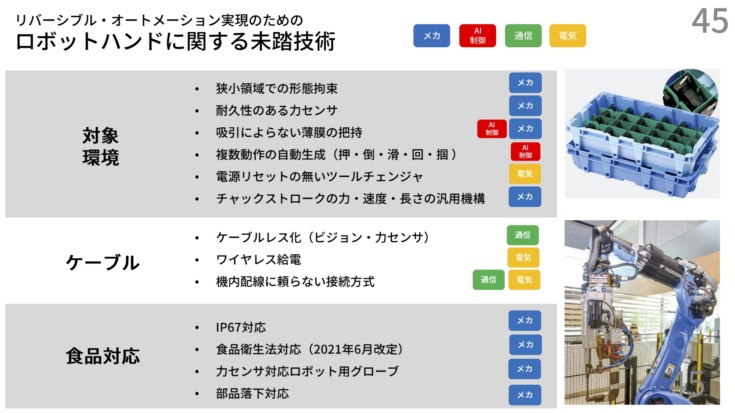
ハンドにも未踏部分は多い。西田氏は「狭小領域での形態拘束」を挙げた。生産現場では仕切られたトレイで部品が納品されることは多い。その仕切りのなかに指を突っ込んで傷つけずに一個ずつ運んで持つのは人間にしかできない。耐久性のある力センサも必要だ。100万回が目処だという。
吸引せずに薄膜が把持するハンドも必要だ。人間はその手のものはずらして持つ。それを実現するためには押してずらして回して持つといった複数動作を連続で生成する必要がある。そのほか電源リセットのないツールチェンジャーやチャックストロークの力・速度・長さの汎用機構なども求められている。
ケーブルレス対応、食品分野向けにはまず防塵防水、IP67対応が必要だ。また2021年6月に改定される食品衛生法対応も必要だ。つまり食品にふれられる素材でハンドを作らないといけない。西田氏はそのほか力センサ対応ロボット用グローブ、部品落下対応などを挙げた。
センサーとロボット動作のための3D地図
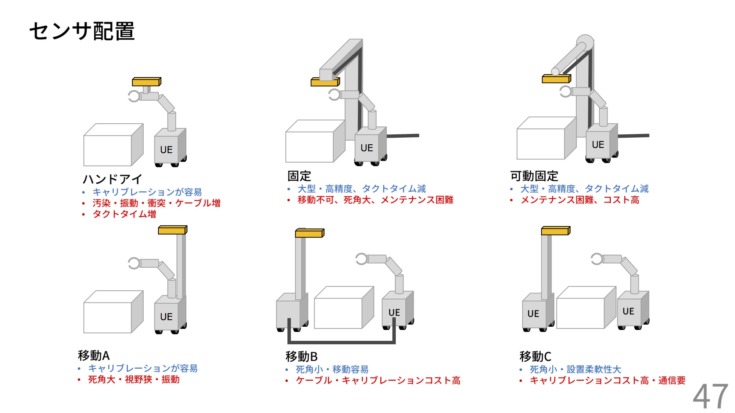
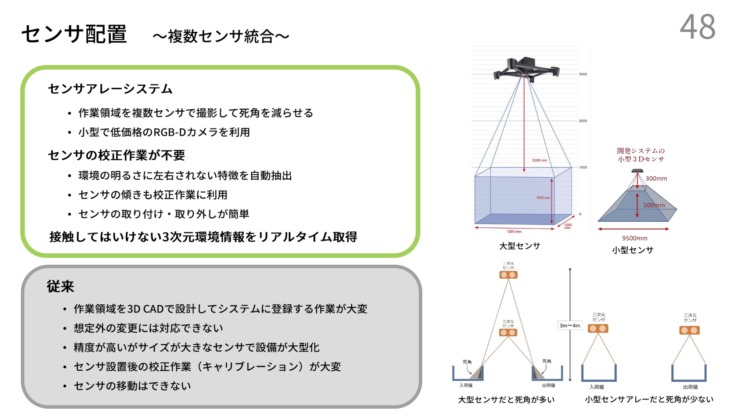
3D計測についても、センサーをどこにつけるかという課題がある。西田氏は、最近増えたハンドアイは究極の答えではないと語った。汚染されるし、ケーブル問題や振動もあるからだ。そのほかの場所も一長一短である。ではどうするべきか。西田氏は、センサーは複数あるべきで、アレイセンサーをポン付けし、インテグレートして使えるソフトウェアが出て来るべきだと語った。
ロボット動作内の物体に関する環境キャリブレーションがもっとも重要だ。自動運転の世界では動作のためのダイナミックマップがよく研究されている。それぞれ更新頻度の異なる、動的情報、準動的情報、準静情報、静的情報を異なるレイヤーで管理する。これと同じ考え方をロボットにも導入するべきだと西田氏は語った。
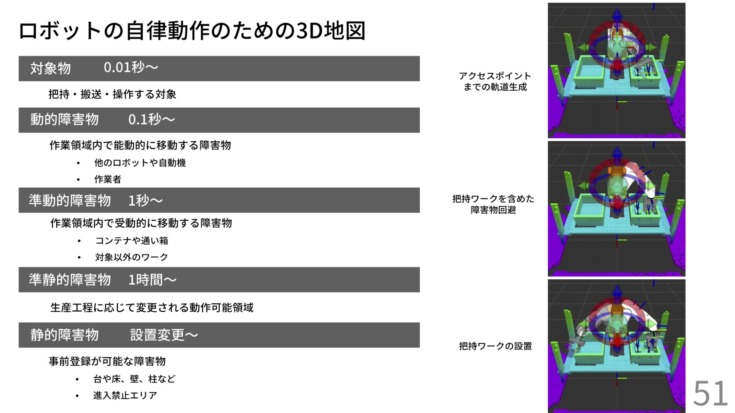
ただし、ロボットに使うためにはレイヤーがもう一つ必要となる。自動運転は衝突を回避すればいいが、ロボットは作業をしなければならない。つまり対象物のレイヤーが必要となる。西田氏は「自動運転の知見も使いながら3次元マップを作りましょう」と提案した。3D地図には様々な表現形式がある。設計データを使うレイヤーもあれば3次元点群を扱う形式もある。センサ情報から環境認識を行うライブラリーのOctomapなどもある。3D地図を使うことでロボットは障害物に当たらずに自由に動けるようになる。
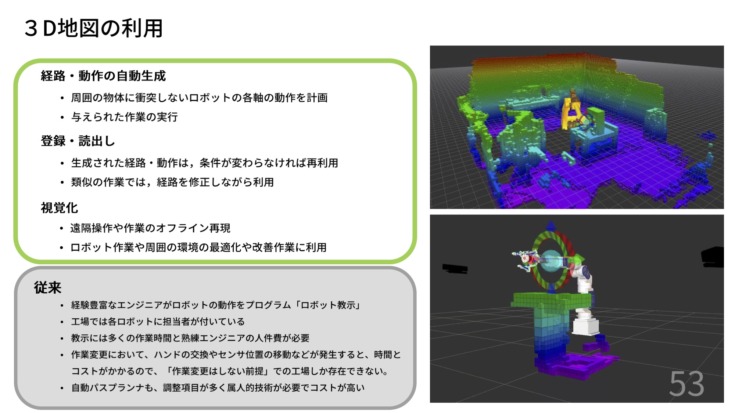
3次元計測に関する未踏技術も多い。西田氏はリバーシブル・オートメーションの視点から見ても重要だと述べた。またデンソーとの共同研究の一つとして行った、VRを使って対象物の移動を指示したらロボットがリアルの世界でそれを実行するというデモを見せた。システムを3Dマップを理解していればできる。

モーションコントロールとパスプランニングの課題
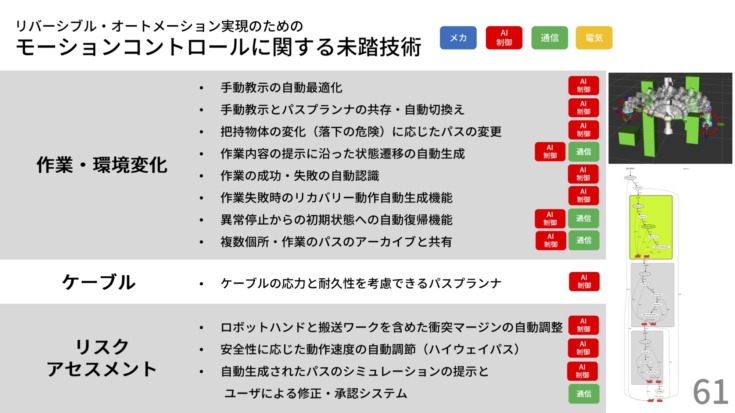
座標系も重要だ。環境、対象物、センサーなどを整合させなければならない。座標変換は繰り返すたびに誤差が重なってしまうので、とにかく何でも変換すればいいわけではない。パスプランナーは今はオープンソースで様々なものが使えるようになっているが、得意不得意はあるのでケースバイケースで使い分けする必要がある。西田氏は手動教示の自動最適化や、把持した物体を落としたときのリカバリーの重要さを強調した。
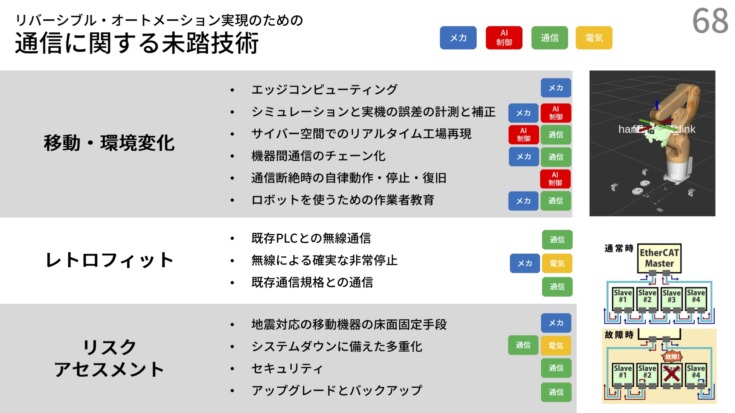
通信と遠隔操作の課題
■動画
通信に関しては今後は5Gを使うことで遠隔操作ができるようになるだろうと述べた。2019年にはauと共同で、九工大から工場内の産業用ロボットを操作するという実験を行って、工場内で実際に5Gが使えることを実証した。5Gを使うことでロボットのワイヤレス化が可能になる。現場で動いているPLCとの接続が特に重要になるという。
西田氏は最後に改めて、生産革命が目指す未来像としてマスカスタマイゼーションを挙げて、スマートファクトリー化のためにはまずはリバーシブルオートメーションが重要だと述べ、そこへ至るための技術的未踏領域を一緒に開発研究をしていきたいと講演を締めくくった。
KiQ Roboticsのビジネスについて
なおKiQ Roboticsではハンドの販売を2020年から進めており、数社に対してPoCを進めているという。2021年2月に発表した、写真2枚を見せるだけでその差分からロボットを動かせるUIパッケージ「Quick Factory」についてもPoCが検討されているとのことだった。
■動画
KiQ Robotics株式会社



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
森山 和道PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

