
仮想の境界線で囲まれた都市や住宅地域などのエリアを、人間の監督なしで完全自律走行できるロボタクシー(無人タクシー)の実現は、最も現実的で課題の解決にも有効だ。これに大きな一歩が踏み出されようとしている。
運転手の代わりに高解像度のセンサーとスーパーコンピューティングプラットフォームを搭載することで24時間365日安全に走行することができるロボタクシーは、現在の輸送手段に代わる、より安全な輸送手段として期待されている。これが実現すればすぐに普及し、大規模展開されると予想できる。2030年までに世界における車両の移動距離の5%以上を占めるという予測すらある。
同タクシーの実現に向け、モビリティテクノロジの大手企業である滴滴出行(Didi Chuxing/ディディチューシン)の自動運転テクノロジ事業部門、DiDi Autonomous Drivingは、2021年4月、DiDiの自動運転走行試験向けの自動運転車両において、Volvo Carsとの戦略的パートナーシップの締結を発表。同年5月、NVIDIAが同締結に関した記事を同社公式ブログに掲載した。
今回のパートナーシップ締結について
NVIDIA DRIVE AGX Pegasusを搭載した新しい自動運転ハードウェアプラットフォームであるDiDi Gemini(ディディジェミニ)を、Volvoの自動運転対応車両XC90に、初めて統合する予定だ。最終的に同車両でロボタクシーサービスを展開することを目指している。 同自動運転テスト車両により、商用ロボタクシーサービスの実現に向けて大きく前進したことになり、DiDiが開発したこの車両は、パフォーマンスとエネルギー効率の高いNVIDIA DRIVEのコンピューティングを中核に据え、ロボタクシーへの大規模な移行を加速する一助となろうとしている。
自動運転ハードウェア プラットフォーム「DiDi Gemini」
DiDiのロボタクシーの目標達成への鍵を握るのは、新しい自動運転ハードウェア プラットフォームであるDiDi Geminiだ。完全自律走行できる自動運転車を実現するには、中央集中型のハイパフォーマンスコンピューティングが必要となるが、同タクシーが処理する必要のあるセンサーのデータ量は、現在の最先端車両の100倍の量にのぼる。
ソフトウェアの複雑さも指数関数的に増しており、統合されたソフトウェアスタックの一部として、冗長かつ多様な一連のディープニューラルネットワークが同時に実行される。NVIDIA DRIVE AGX Pegasus上に構築された 同プラットフォームは、1秒間700兆回の命令を処理できる能力(700 TOPS)を有しており、最大50個の高解像度センサーとASIL-D規格に準拠したフォールバックシステムを搭載。
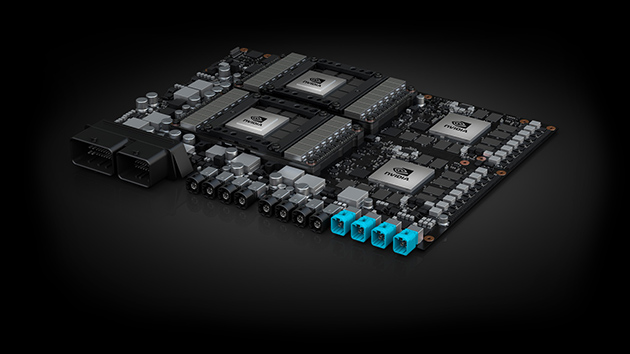
多層の冗長保護を備えた設計で、自動運転体験の総合的な安全性を高めている。また、ライドシェアサービスにおけるDidi Chuxingの大規模なデータベースと、実際の自動運転テストでのデータを使用して設計されており、最適な自動運転ハードウェア体験を提供する。
新世代のコラボレーション
今回の走行試験は、テクノロジのコラボレーションの新時代を象徴する車両でもある。同社と Volvo Cars は長期的なパートナーシップを構築し、自律型走行試験の展開を中国と米国全体に拡大し、ロボタクシーの商用稼働を広げようと計画している。NVIDIA DRIVEプラットフォームにより、OTA(Over The Air:無線ネットワーク) による継続的なアップデートが可能になり、開発と拡張に関するこのような将来計画の実施が容易となる。 NVIDIAでは、車両の安全性やライドシェアの専門知識、AIコンピューティングの各分野において、両社が長年培ってきた経験や成果が融合することで、輸送技術の限界が押し広げられ、日常のモビリティが、より安全でより効率的になるだろうと推測している。
■【動画】DiDi Autonomous Driving Releases Recording of Five-Hour Road Test Without Disengagement in Shanghai(英語)
Didiがレベル4自動運転車実現のためにNVIDIAと連携 クラウドで学習、NVIDIA DRIVEで推論
【GTC2019】NVIDIAが描く自動運転技術の現状と未来 〜報道向け説明会レポート「Constellation」シミュレータの実演デモも披露



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
ロボスタ編集部PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

