
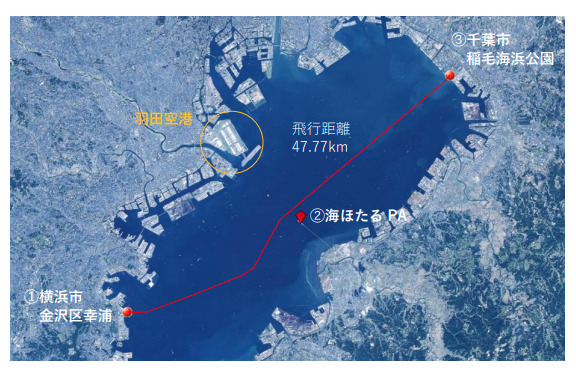
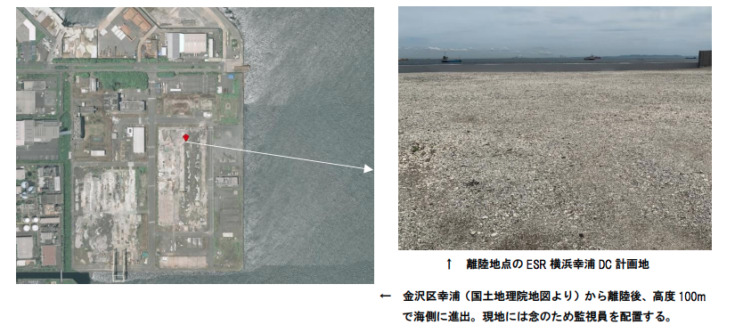
一般財団法人先端ロボティクス財団は東京湾岸エリアに位置する政令指定都市の横浜市と千葉市間の約50kmをドローンでつなぎ、東京湾上の超低空域にドローン物流ハイウェイを構築することを目的として、小型ドローン「カイトプレーン」でのレベル3(目視外補助者なし)飛行による東京湾縦断飛行の実証実験を実施することを発表した。離陸場所はESR株式会社の協力により、同社が所有するESR横浜幸浦ディストリビューションセンター計画地内にて実施する。
カイトプレーンについて
世界には多様な民生用ドローンが存在するが、約50kmを超える東京湾縦断飛行を実現できる一般的なマルチコプター機は存在しない。そこで固定翼に凧が付加されたカイト
プレーンという極めて耐空性の良い機体を使用。カイトプレーンは機体、オートパイロット等すべてを国産技術で実装し、30年間近い飛行実績を有する無人航空機。

1991年の長崎県雲仙普賢岳の噴火時にはNHKから依頼で、カイトプレーンによる空撮映像が全国に放映。2000年の三宅島噴火時の災害調査でも活躍した。さらに2006年には第48次隊の極地研究所らのグループが南極で初めて飛行観測を行った際に活用されたのをはじめ、2016年第58次、2017年59次、2018年60次、2020年62次南極観測においても活用されている。さらに、中国敦煌の大気観測等に利用され貴重なデータ取得を行った等、海外での実績もある。

今回の実験では6月21日(月)に神奈川県横浜市金沢区幸浦~千葉県千葉市美浜区稲毛海浜公園の約50kmを飛行。横浜市金沢区幸浦から千葉市美浜区稲毛海浜公園まで、最短距離は約47.77kmだが、大型船舶上空は回避しながら飛行するため、実質的な飛行距離は約50kmとなる。
実験の目的
2020年7月の第14回官民協議会で提案・審議された「空の産業革命に向けたロードマップ 2020」において、2022年を目途に物流を想定した有人地帯での目視外・第三者上空飛行(レベル4)を実現することが確認され、機体認証、運航者免許、運航管理、機体登録(法律制定済み)の法整備を2021年中に完了することとなった。一方、物流に関して政府は、社会状況の変化や新たな課題に対応できる「強い物流」を構築するため、2017年7月に「総合物流施策大綱(2017 年度~2020 年度)」を閣議決定し、『物流の生産性向上に向けドローン物流の取組を推進しており、空を活用することで道路という既存インフラに制限されず、物流に新たな可能性が生まれる。』と提言している。
現在、物流ドローンに関する取り組みは、離島や過疎地等での荷物配送の実証実験が盛んに行われているが、第三者上空飛行が許可されていない法規制下で、都市部ではほとんど行われていない。しかし、ドローンによる物流は都市部で実現してこそ、ビジネス性が向上し「空の産業革命」が加速されると考えられる。
こうした背景を踏まえ、先端ロボティクス財団は横浜市から千葉市へのドローン物流を想定した実証飛行実験を提案。東京湾の横浜市から千葉市に至るエリアは1日約500隻が航行する世界有数の海上交通過密海域であり、また、旅客機が過密ダイヤで離発着する東京国際空港(羽田空港)に隣接している。このエリアにおいて、2022年の第三者上空飛行解禁を見据えながら、現在の法規制の中で最大限できる飛行を行い、都市部でのドローン物流の課題を抽出することが実験の目的となる。
実験においては、レベル3(目視外補助者なし)飛行による航続距離約50km、滞空時間1時間の長距離物流を東京湾縦断飛行として実証する。これは東京湾岸エリア全域をカバーできるドローン物流の性能を有し、首都圏の2つの政令指定都市(横浜市・千葉市)を結ぶ、BtoBまたはBtoCの便利で低価格なビジネス便として飛行できる。湾岸道路、アクアラインという地上交通網とは別の第3の大動脈・空の交通システムとなり、ひいては慢性的な地上交通システムの渋滞回避に貢献する、新たなエコシステムとしてのドローン物流の構築につながるもの。
さらに、首都直下型地震や、近年多発している大型台風、集中豪雨など大規模災害の発生時には、空からの被災地調査や救援物資の搬送を行うことができる救急ドローンにもなり得まる(非常時に備えるためにも、平常時にドローン物流ハイウェイとして稼働していることが重要)。将来的には、このドローン物流ハイウェイを拡張して、横浜市・川崎市等を中心とする京浜地区と千葉市・市原市等を中心とする京葉地区の各都市を結びながら、必要に応じて房総半島や三浦半島まで拡張する構想。
搭載機器と安全対策
カイトプレーンには冗長系フライトコントローラ(CPU,IMU,GNSS,電源等は二重系統)、航空機の監視にADS-B、船舶の監視にAIS、通信は画像伝送に5.7GHz、テレメトリに351MHz の機器を搭載。また、気象データ表示機能、エンジン停止機能などを搭載する。
先端ロボティクス財団では約2年前に「東京湾縦断飛行」の企画立案・準備に着手し、2019年秋から熊本湾岸エリア等での飛行テストを重ねてきた。その中で判明したのは、人口過密地区近郊における長距離飛行には、「型式証明や耐空証明に準ずる墜落しにくい優れた機体性能」「1つの不具合があってもミッションが継続できる信頼性・耐久性のある冗長な駆動系やフライトコントローラ」「飛行中に途絶しないロバストな無線通信システム」が必須であるということ。この3つをコア技術として性能を高めてきた。
安全対策として自動操縦システムを装備し、機体に設置されたカメラにより機体の外の様子を監視し、電波途絶等の不具合発生時には、バックアップの通信機で飛行管制を行う(通信機すべてが途絶した際は、フェールセーフとして自動帰還をさせる)。また、機体の異常およびガイダンス・ナビゲーションの位置、速度、高度および姿勢等の異常の有無を監視し、エンジンに操縦系とは別の無線機で動くキルスイッチによる暴走対策を行う。
なお、離陸地点での地上風速が平均風速 5m/秒を超える場合は、飛行を中止する(この場合、上空100m付近では平均風速10m/秒以上となり、カイトプレーンの飛行性能として、カイトが受ける風外乱により目標軌道からの追従誤差が大きくなり、予定飛行範囲を逸脱する可能性があるため)。
一般財団法人先端ロボティクス財団



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
山田 航也PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

