

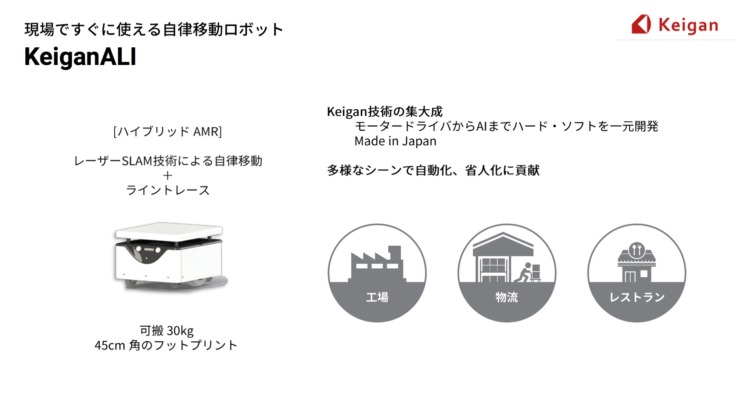
ロボット用のモーターモジュールを販売しているスタートアップ株式会社Keigan(ケイガン)は、2021年7月16日から自律移動ロボット「KeiganALI」(ケイガンアリ) の限定販売と出荷を開始したと発表した。
「KeiganALI」は450 mm x 450 mm x 300 mm。重量27.5 kg、最大積載重量30kgのAMR(Autonomous Mobile Robot。協働型自律移動ロボット)。最大走行速度は0.5 m/s。登坂能力1.1度。停止位置精度は± 75 mmだが、ラインまたはマーカー使用時は繰り返し精度 20mm以内となる。
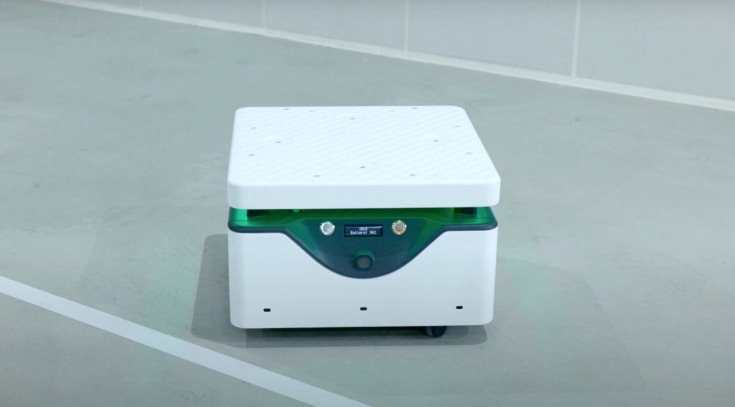
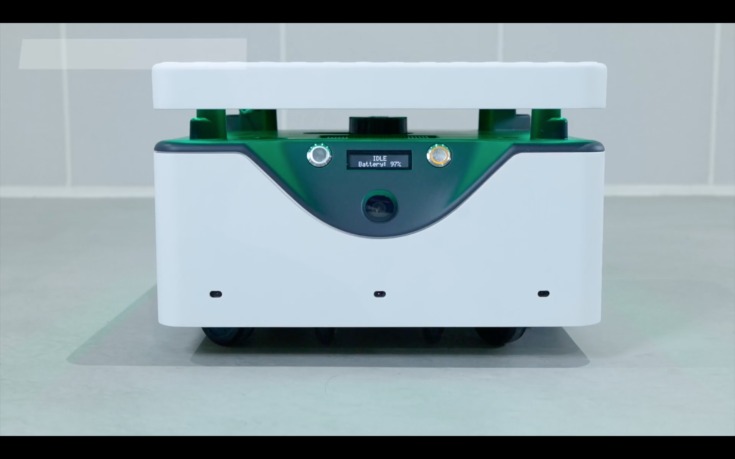
本体外周にはステイタスを示すLEDがある。LEDはウインカーも兼ねている。

バッテリーはリチウムイオンバッテリー(DC24V 22Ah)。充電時間は5時間。連続稼働時間は8時間。または走行距離約5km。

LiDAR(レーザーセンサー)、5つの障害物センサーを搭載しており、障害物は自動で回避する。地図作成と自己位置推定を同時に行うSLAMを行い、ロボット本体を使って事前に作成するマップ上で設定したルートのガイドレス自律移動ができる。環境変化に対しても、多少の変更であれば地図再作成の必要はない。また大手他社の同様の台車に比べて地図作成自体が高速に行えることから、再作成も容易だという。
また、カメラを使ったライントレース(床面のライン追従)走行も可能。磁気式テープに比べると安価なラインテープですむので初期投資を下げることができるとしている。なお途中までガイドレスで移動し、途中からガイドテープを使ってより高精度に動かすといったこともできる。
操作設定はロボットとタブレットやスマートフォンをWi-Fiで本体に接続し、ウェブブラウザからアプリを利用して行う。マップ作成・ルートの設定から実際の運用まで、タッチ操作で素早く簡単に設定することができるとしている。プログラミング知識がなくても使えるという。また開発者向けAPI公開も予定しており、より高度な利用も対応できるという。
本体上部には8箇所にネジ穴が切られており、アルミフレームなどのオプションパーツを取り付けてカスタム化することができる。
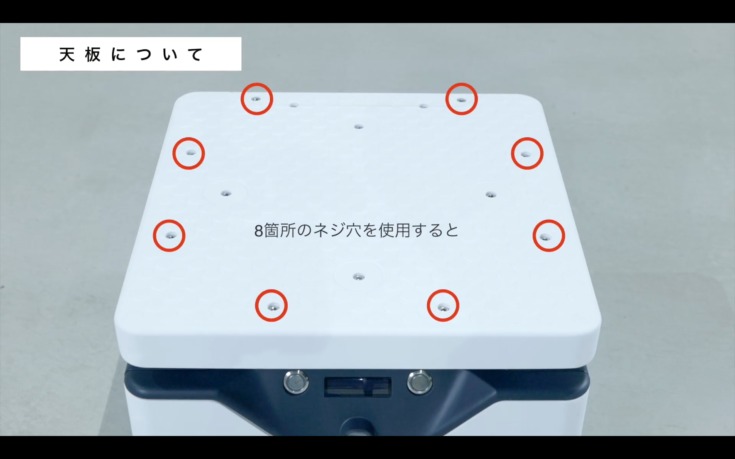
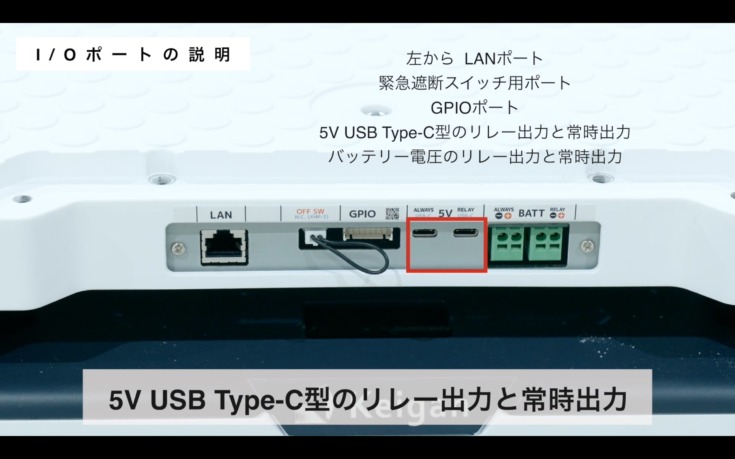
また24V・5V の電源取り出し、動力遮断スイッチ、GPIO、LANポート、Wi-Fiが使える。工場、物流倉庫、飲食店など、幅広い活用を想定している。

価格は100万円。2021年度の販売目標は100台。注文から納品までは1ヶ月〜2ヶ月程度。製造は国内の提携工場で行う。オプション類については詳細を検討中で、3ヶ月以内の製品化を予定する。
■ 動画 自律移動ロボット「KeiganALI」紹介①~ALIから始まるスマートファクトリー~
工場でカラクリを少しだけ知能化するKeiganモーター
Keigan代表取締役の徳田貴司氏に、今回のAMR開発に至る経緯について、話を伺った。徳田氏はシャープ出身で、2014年に独立。2015年に総務省「異能vation」(独創的な人特別枠)に採択され、その資金を使って独自のモーターモジュールを開発した後、Keigan社を2016年9月に創業した。Keiganは「慧眼」に由来する。主力商品は「異能vation」資金で開発した試作品を発展させた独自のモーターモジュール「KeiganMotor(https://keigan-motor.com/)」で、2017年から発売している。モーターにマイコン、無線、センサー類を全て搭載しており、5V 最大2.4Aで動作する。モバイルバッテリーでも長時間使用ができることから「アイデアをすぐにかたちにできるモーター」として販売している。
■ 動画 驚くほど簡単に、ロボットが作れる Keigan Motor
これまでの販売個数は2017年からの4年間で、モーターだけで見るとおおよそ 2,000個程度とのこと。当初はラピッドプロトタイピング、大手企業や大学での研究開発用をターゲットとしていたが、それだけでは、なかなか数が出ない。リピーターがいても一箇所あたり数個程度で終わってしまう。そこで同社では今はターゲットを産業用にシフトしている。

具体的には工場内で用いるAGVキット、そして搬送ローラーキットである。自動車工場などには「カラクリ」と呼ばれる基本的には無動力の仕掛けが多くあり、主に工程間で箱やパレットを運ぶために使われている。だが、ちょっと動力が欲しいときもある。そこでローラーコンベア、コロコンコンベアにワンタッチで取り付けて動力化できるKeiganモーターに目をつけたユーザーが大手自動車メーカーにいた。

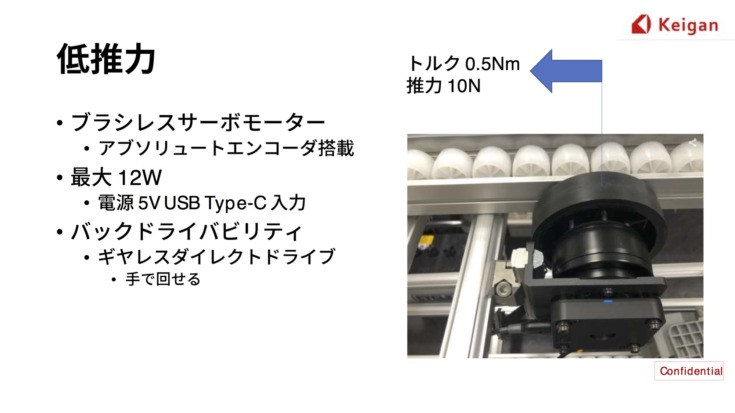
Keiganモーターはモバイルバッテリーでも動くので特別な電源を用意する必要もない。トルクも低推力のため、非常に安全性に厳しい現場でも使えると判断されたことから、搬送以外の用途にも使ってもらえるようになっていた。それをきっかけに、特にここ1年半は、工場内の搬送向けニーズが増えているという。
10kg可搬のKeigan AGV
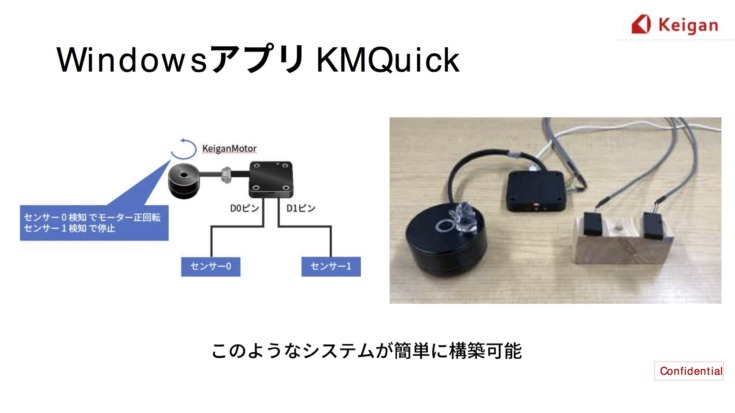
2020年初頭からは産業用のRaspberry Pi に開発環境をインストールしてセットにした製品「KeiganPi スターターキット」も販売している。Python等でも開発できるが、Keiganではプログラミングなしで開発したいというニーズに応えるためにビジュアルプログラミング環境の「Node-RED」や、より簡単に使えるようにするために「KM Quick」という無料のWindowsアプリも開発している。Keiganモーターのコントローラのなかにシーケンスプログラムを全部入れてしまうことで、外部のコントローラーなしでモーターのコントローラーにセンサーをつけるだけで、センサーの前を何かが横切ったら止まる、あるいは動き出すといった動作が可能になる。条件分岐はできないが複数のモーターを使うことで、より複雑な動きもできる。
搬送以外にも、生産設備のベテランも多い自動車工場では様々な用途に使われている。Keiganモーターはトルク制御も可能だ。その特性をいかして測定装置などにも使われており「場合によってはこれでも十分だという評価を受けている」そうだ。なお「Node-RED」よりもPythonを使っているユーザーのほうが増えており、ユーザーのなかには機械学習とモーターを組み合わせて実際に活用しているケースもあるという。

KeiganではPythonでの開発の延長上に、10kg可搬のAGV「Keigan AGVキット」を開発した。オープンソース化しており、ソースコードはGithubで公開されている。KeiganモーターはUSBモバイルバッテリーで動作するので、ちょっと容量があるバッテリーを使えば、それだけで10時間程度動かすことができる。「ちょっと交換すれば2直(8時間+8時間)動かせる。低推力であることから、思い切った運用をしてもらっている」という。なお実際に当たっても大丈夫かどうかも測定した上で、超音波センサーなどもなしの本当に簡易なAGVとして使われているそうだ。価格は20万円以下である。10kg以下しか運べないので部品単位の搬送や廃棄品の搬送などに使われているという。これを踏まえて開発されたのが今回の「Keigan ALI」だ。
なお「Keigan AGV」はライントレースや、二次元マーカーを組み合わせた走行も可能で、一部ユーザーにはサンプルコードを配布している。二次元マーカーを使うことで分岐や複雑な動き、複数台同時運用もできるようになる。ユーザーのなかには、かなり作り込んだ運用をしている人たちもいるとのこと。なおAGVでの二次元マーカーの利用は最近流行りつつある。このAGVによる光学式ライントレース機能は、今回のAMR「Keigan ALI」にも導入されている。

「Keigan ALI」のこだわりは使いやすさとレスポンス

「Keigan ALI」について徳田氏は「小回りがきく。回避性能は高い。スタックしてもすぐに復帰してくれる。機敏に動くのが一つの特徴」と語る。本体幅・奥行きは45cmで、カタログスペックでは70cm以上の通路幅に対応する。足回りや基板もモータードライバー、自律移動のアルゴリズムはすべて自前。組み立てだけは外部OEMメーカーに出しており「今まで懸念だった在庫や部品調達などでは大きなサポートをしてもらっている」という。
可搬重量は30kg。比較的、軽量だ。今後は積載重量がより大きなものも開発していく。用途は工場のほか、物流倉庫でのピッキングロボットや、レストランなどでの活用も期待している。
特にこだわった点は「使いやすさとレスポンス」。「マッピングが他社国産メーカーと比べると速い。およそ半分くらいの時間で済む」という。「毎日スキャンしても手間にならないように、UIも使いやすいように意識した」そうだ。「お菓子工場や食品工場は毎日レイアウトが変わる。レイアウトが変わるとSLAMは位置をロストしやすくなる。もし風景の50%以上が変わるようならもう一度マップを作り直してもらう必要があるが、そのときも大手他社のロボットに比べてすぐに済むので、煩わしくない」(徳田氏)。大手メーカーのロボットに比べても「機能的な面では遜色ない。むしろ上回るところが多い」と胸を張る。
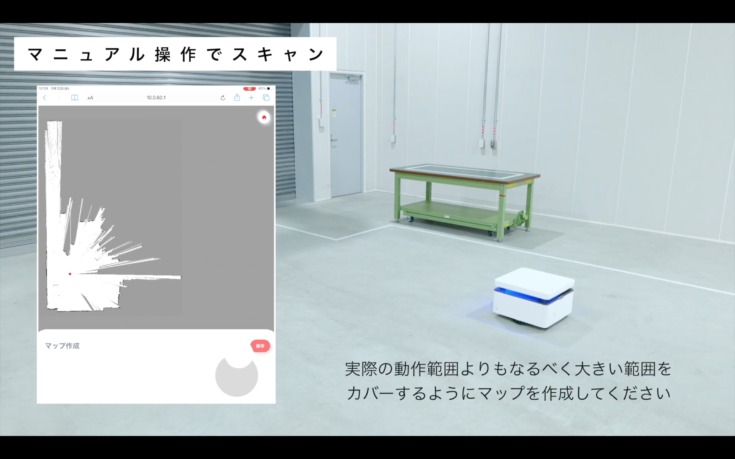
マッピングとタスク設定はウェブアプリで

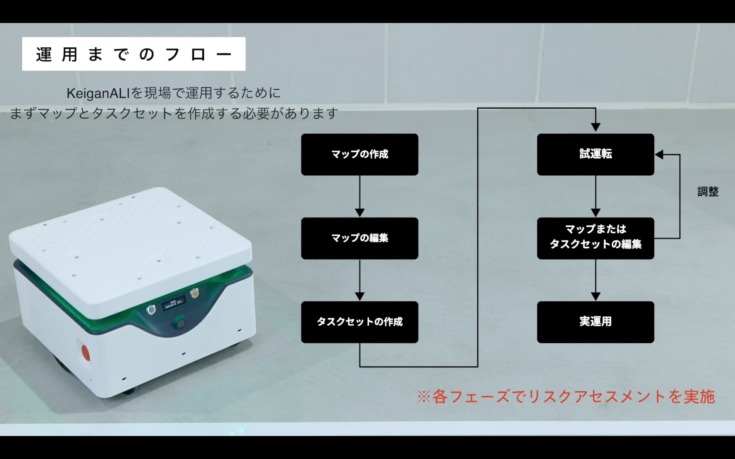
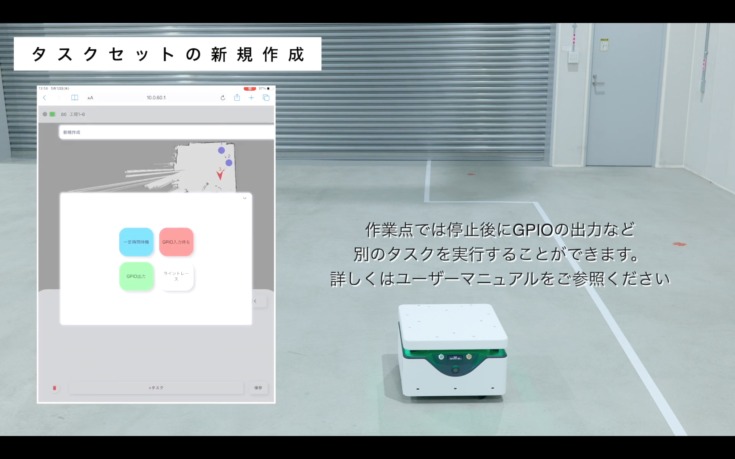
マッピングはロボットを人がタブレットからリモート操作して行う。操作のためのウェブアプリは本体にあってWi-Fiで接続して用いる。「スマホアプリが使える人」なら使えるという。マップ作成ボタンを押すとタブレット上でロボットが操作できるようになるので、ロボットを動作範囲で動かしていく。最後はマップ名をつけて保存し、そのあとに「タスクセット」という画面でロボットの動作(Keiganモーターに与える命令のセット)を設定していく。
実際のマッピングはどのくらいの時間でできるのか。50平米くらいの工場で、細かい入り組んでいるところがなければ、おおよそ5分くらいでマッピングができるという。
人や、普段動かす台車などの削除を含むマップ形状の修正、走行不可領域の設定などは手動で行う。それもGUIで直感的に行えるようになっている。なお、一辺が100-200mといった広い範囲のマッピングも可能だが、一部を変更するだけで全体をやりなおす必要があるので、その場合は複数枚のマップを連続で切り替えて使うほうが現実的だと考えて、その実装も進めている。

指定場所での作業については「タスクセット」で指定する。タスクセットとは指定の場所で実施するタスクやポートの入出力などをひとまとまりにして順番に実行できるようにしたセットのこと。地図上の任意の場所でロボットを動かして、ロボットの向きや位置を決め、停止後のGPIOの出力などを指定する。
実際に見せてもらったところ、工場での作業者ならばまず問題なさそうだった。より簡単にタスクのボタンだけを並べたUIも考えており、たとえばバイトやパートの人は、その画面だけで作業できるような使い方を想定しているそうだ。

なお、これらの作業についても現在、マニュアル動画を作成中で、近日、KeiganのYoutubeチャンネル(https://www.youtube.com/channel/UCkLOcUFznwvs–pmz2M5kiw)上で公開される予定とのこと。
複数台運用への対応はこれから

現在は工場と物流倉庫系の商社からの問い合わせが多いが、Keiganではどちら向けとも絞っておらず、今はまだ車体の開発に専念している。今後は、より荷物を積載できるモデルなどの開発も進める。また、ニーズが予想される複数台の管理については、現時点では実装されていないが視野には入っている。現在のモデルでもAPIは公開されているので、一台一台に命令を送ることはできる。つまりWi-Fiルーターに複数台のロボットを接続して、それぞれに命令を投げること自体はできる。だが統合された配車管理は今はできない。やりたければそれぞれのSIerが自前で開発するしかない。
今はその段階だが、今後、Keiganでも数台のロボットを同一サーバーで管理できるようにしたいと考えて準備を進めているという。物流倉庫などでの運用の場合は、ERP(基幹システム)や在庫管理システムとの連携も必要となるため、現実的にはあいだには別のインテグレータが必要になるが、いずれにしても、より使いやすく、開発がしやすくなる機能を実装しようとしている。
使いやすさでAMRトップを狙う
■ 動画 自律移動ロボット「KeiganALI」紹介②~はじめましてKeiganALIです~
OEMメーカーと一緒に海外展開も視野に入れている。2021年度の販売目標は100台だが、「アグレッシブな目標としては2024年いっぱいで世界で1万台を売りたい。今は生産制限をかけている。半年くらい実績を積んで、どこかのタイミングで国内での販売数量を一気に伸ばしたい」(徳田氏)。
AMRは、いまちょっとしたブームになっている。環境変動への対応についても多くの企業が取り組んでいる。ライバル製品は多い。徳田氏は「群雄割拠で大手からも出ているし、増えている印象は受けている。だが使いやすさの面ではトップを走りたい」と語る。次のステップとしてはKeiganモーターとAMRの連動を考えているという。「AMRは他との連携が意外と面倒なんです。モノを動かす観点ではロボットだけではなくコンベア側で何かすることができればいいのではないかと考えています。既存のコンベアとインターロック信号を取り合うと、それだけで大仕事ですが、それをなるべく減らせるようにKeiganモーターの良さを生かせると差別化になると思っています」(徳田氏)。
運動性能も追求する。「Keigan ALIは10mmくらいの段差なら何の問題もなく乗り上げることができます。駆動輪にはサスペンションも入っています。開発中の可搬重量が大きいモデルでは、もっと走破性や動性能を追求して、他社と比較しても『優れている』と言われるものを目指せる自信があります。しかもリーズナブルな価格で使える。初めて『手軽に使える』と言われるAMRにしたい」。より使い勝手を上げるため、入出力ポート数も拡張する予定だ。
現在Keiganの社員数は7人。今後は人員も強化する予定だ。新型コロナ禍で止まってしまっているが、バングラディシュなど繋がりのある海外からもエンジニアを入れる予定だという。
AMRに限らず、ロボットはいま、中国メーカーの価格と勢いに押され気味だ。「中国メーカーはどんどん実地に導入して、粗を出して、改良を進めていく。失敗を恐れない。そこに勝つためには、ある程度少数で作って、意思決定を速くして、導入していかないといけないと思う」(徳田氏)。
「KeiganALI」の名前の由来は「アリさん」だそうだ。「単純に働きアリみたいに機敏に動き続ける」ロボットをイメージした名前だ。アリさんの活躍に期待している。
株式会社Keigan



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
森山 和道PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

