
近年、物流現場や店舗などで自律型のロボットがさまざまな現場で活躍を始めているが、常識や社会的文脈に沿った臨機応変な対応などができるように、事前にその状況をすべて洗い出してAIに教え込ませることは不可能だ。
そのため、僅かに残存する異常状態への対応ができないために自律ロボットの導入に踏み切ることができないか、導入できる業務が限定されてしまうという課題がある。また、既に導入済みの場合でも、AIの限界によってロボットが停止してしまい、現場での復旧作業が必要となり、運用効率が低下するケースも見受けられる。
そこで、東京大学の人型ロボット研究室JSK(情報システム工学研究室)出身者が中心となり2011年に創業した、知能ロボットの開発を行うベンチャーである株式会社キビテクは、高度自律型遠隔制御システム(HATS/ハッツ)の開発を進めており、2021年8月26日、株式会社ピーエムティーのオフィス内において、同システムの実環境における試験運用を実施したことを同年9月13日に発表した。

HATSについて
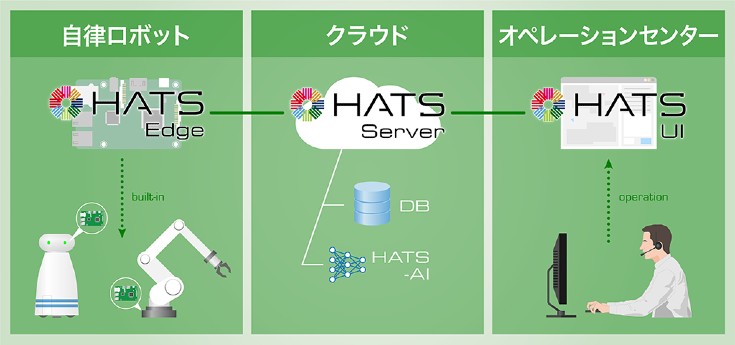
HATSは、遠隔オペレータが簡単な操作で要点のみをロボットに指示することで、これにより停止したロボットの復旧などの対応を効率的に行えるようにするサービスだ。AIの限界という課題に対し、オペレーションセンターから「人がAIをアシストする」ことで、さまざまな高難度の業務への自律ロボットの導入を促進するとともに、円滑かつ効率的な自律ロボットの運用を実現する。
HATSの仕組み
自己位置の喪失で動けなくなるなど、自律ロボットへの介入が必要となったときのみ、遠隔のオペレータが簡単な操作で要点のみのアシストを行う。
試験運用の内容
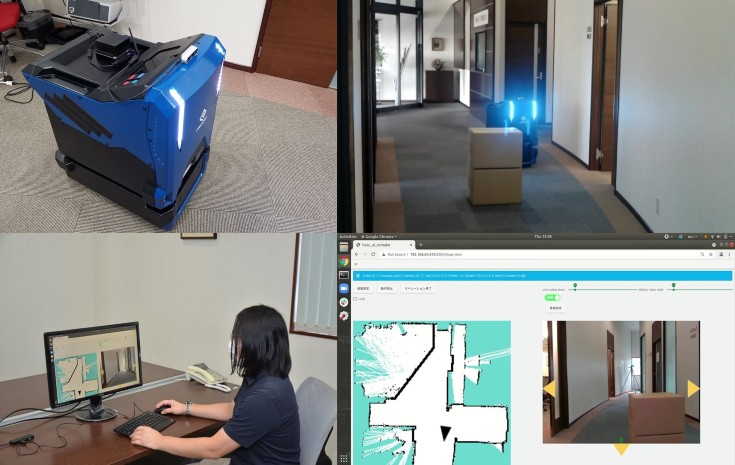
自律搬送ロボットは、自律走行の際に経路上に障害物が存在すると、安全機能により停止してしまう場合があり、復旧作業が必要だ。HATSは、既存の自律搬送ロボットにアドオンすることで遠隔制御を可能とするため、今回の試験運用では株式会社匠が開発している、オゾンガスによる空気除菌を行う自律搬送ロボット「タクミクリン」に遠隔制御用の装置をアドオンし、HATSのシステムと接続することで、遠隔のオペレータからの制御を可能とした。
具体的には、自律走行中のタクミクリンがオフィス内の通路上に置かれた障害物により停止した際に、HATSのシステムにより、ネットワーク経由で遠隔のオペレータに通知が送られ、オペレータが状況確認と復旧作業を行って再び自律走行の状態に戻す、という一連の流れで運用。その結果、自律搬送ロボットの停止状態からの復旧を、遠隔からスムーズに行なうことができ、効率的な運用が可能になることを実証した。
今後の展開
同社は今後、さまざまな既存の自律搬送ロボットにHATSのシステムを搭載し、オフィス環境の巡回以外にも、物流・工場等の施設内の搬送や、警備・清掃・点検等のサービスへの適用も視野に入れ、実運用に向けて開発を行って行くと述べている。
(株)ピーエムティー ソリューションプロバイダーグループ グループ長 西山氏
今回は、当社のオフィス内で試験運用を行って頂きました。ロボットの活用が増えている中、必要に応じて遠隔から操作出来るサービスに利便性を感じました。また、PCから簡単に接続しマウス操作出来る手軽さに仕上がっています。自律走行との組合せのため、必要な時のみ遠隔操作をする点も、利用の幅が広がるポイントかと思っております。
■【動画】純国産自律搬送ロボットメーカー 株式会社TAKUMI が手掛けるタクミクリン
■【動画】高度自律型遠隔制御システム(HATS)のご紹介 (30秒)
新型コロナが不活化する濃度のオゾンを噴霧できる自走型空気清浄ロボット「タクミクリン」 ロボットメーカーのTAKUMIが発表
純国産自律搬送ロボットメーカーのTAKUMI、棚搬送ロボットを試験導入できる「TAKUMI シンプルパッケージ」提供開始
自動搬送ロボット関連(ロボスタ)



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
ロボスタ編集部PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

