

2021年9月11日、第39回日本ロボット学会学術講演会オープンフォーラムとして、ムーンショット型研究開発 目標3 「自ら学習・行動し人と共生するAIロボット」に関するセッションが開催された。
まず、ムーンショット3 プロジェクトディレクターである名城大学 理工学部 教授の福田敏男氏が概要を紹介した。ムーンショットとは、大きなゴールを設定し、難しい問題を目指すプロジェクト。破壊的イノベーションに挑戦する。基礎研究力の引き上げも目指している。JSTに関しては4つのムーンショット目標を掲げている。このうち、主にムーンショット1と3が、ロボットとAIに関連している。
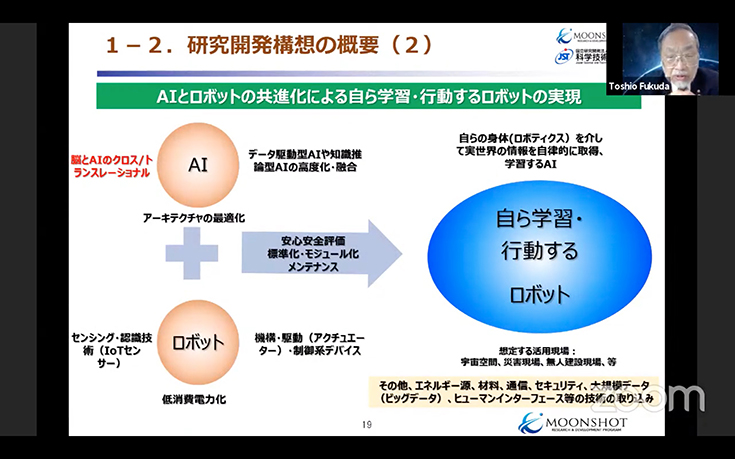
「2050年までに、AIとロボットの共進化により、自ら学習・行動し人と共生するロボットを実現」では、AIとロボット、そして人による共進化の相互作用を目指している。自ら学習・行動するロボットを実現し、様々な新しい発見をしたり、一生人と寄り添うロボットの実現を目指している。
内閣府からは以下の3つのターゲットが示されている。
1)2050年までに、人が違和感を持たない、人間と同等以上な身体能力をもち、ヒトの人生と共に一緒に成長するAIロボットの開発
2)2050年までに、自然科学の領域において、自ら思考・行動し、原理・解法の発見を目指す、自動化AIロボットシステムを開発する
3)2050年までに、人間が活動することが難しい環境で、自律的に判断し、自ら活動し成長するAIロボットの開発
これに対して、それぞれバックキャストして、今から何をするべきかが検討されて、4つの研究開発プロジェクトが採択されている。ここでは、4人のプロジェクトマネージャー(PM)による講演をまとめてレポートする。
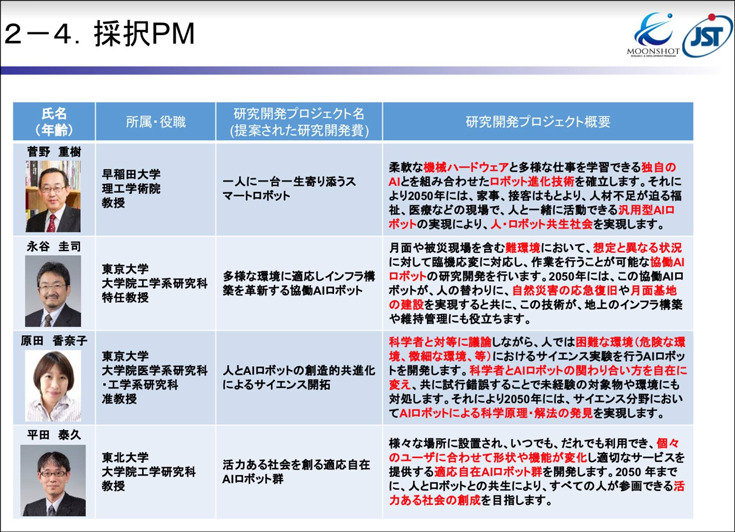
・一人に一台一生寄り添うスマートロボット
・多様な環境に適応しインフラ構築を革新する協働AIロボット
・人とAIロボットの創造的共進化によるサイエンス開拓
・活力ある社会を創る適応自在AIロボット群
「一人に一台一生寄り添うスマートロボット」

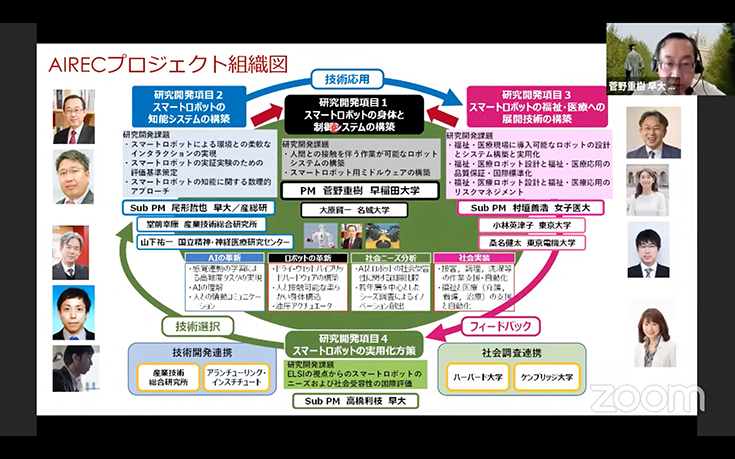
最初に早稲田大学 創造理工学部 総合機械工学科教授の菅野重樹氏が「一人に一台一生寄り添うスマートロボット」と題して「AIREC」を紹介した。「AIREC」とは「AI-driven Robot for Embrace and Care」の略称。「人を包み込む」ところがポイントだという。一台で様々なタスクをこなし、様々な業種で活躍できる汎用ロボットを開発し、社会実装することを目指している。専用ロボットではなく同じロボットが動き回る、様々な作業を一台でこなすことがポイントだという。

早稲田菅野研究室では以前、人間共存ロボット「TWENDY-ONE」を開発していた。移乗介助やストローの操りなどができた。だが人への対応、様々な条件への自律対応についてはAIとハードウェアの進化が必要になる。
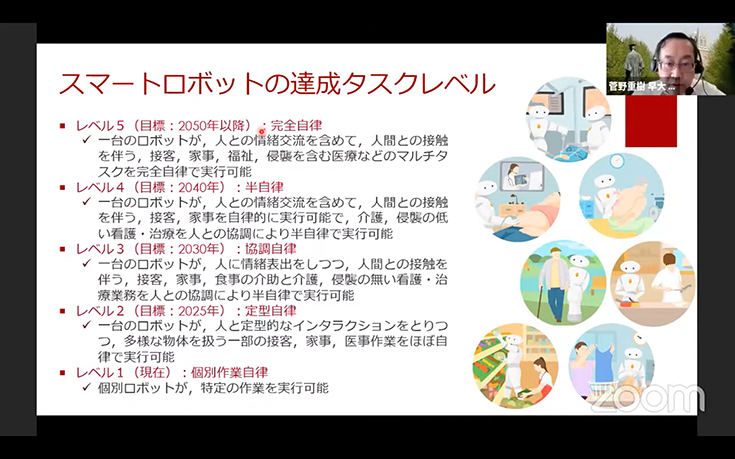
スマートロボットの達成タスクレベルについては自律運転になぞらえて、「レベル1」から「レベル5」まで切り分けて研究に挑んでいる。最重要課題はAIとロボットが社会ニーズに基づいて共進化すること。AIの革新とロボットの革新を相互に進めることで、AIを「ソフトウェア」から「ソフトウェア+ハードウェア」、「身体知(Embodied Intelligence)」として変革することを目指す。
社会ニーズの把握と実用化も重視する。AI世代のニーズを見て評価実験も重ねる予定だ。「身体知(Embodied Intelligence)」については、簡単な教示によって、従来はできなかったタスクをこなすことを目指す。プロジェクトはハードウェア、AI部分、福祉・医療への展開、社会受容性の調査の4つで進める。
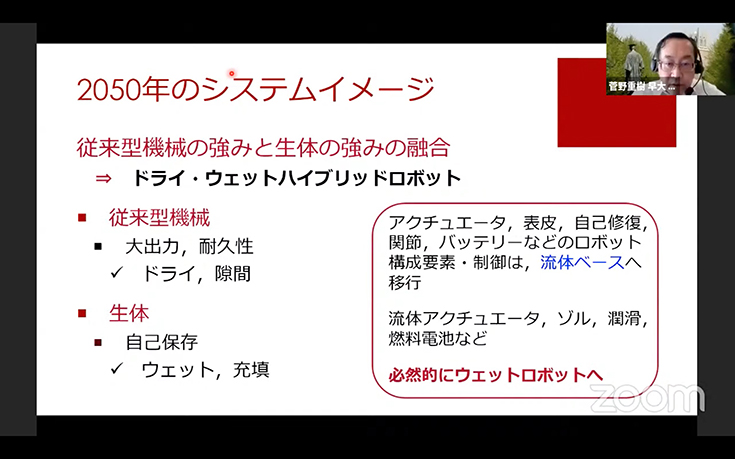
2050年には「ドライ・ウェット ハイブリッドロボット」の実現を目指す。菅野氏らは、アクチュエータや表皮、関節そのほかは流体ベース技術に移行すると見ているという。具体的には油圧人工筋肉や燃料電池、ゾルによる表皮、循環系や自律神経系の開発に挑む。
とはいえ新しいハードウェアはすぐにはできない。そこで、まずは学習を行い人と関わる技術の実験のために学習用ドライロボットを用いる。そのために開発されたロボットが「Dry-AIREC」だ。
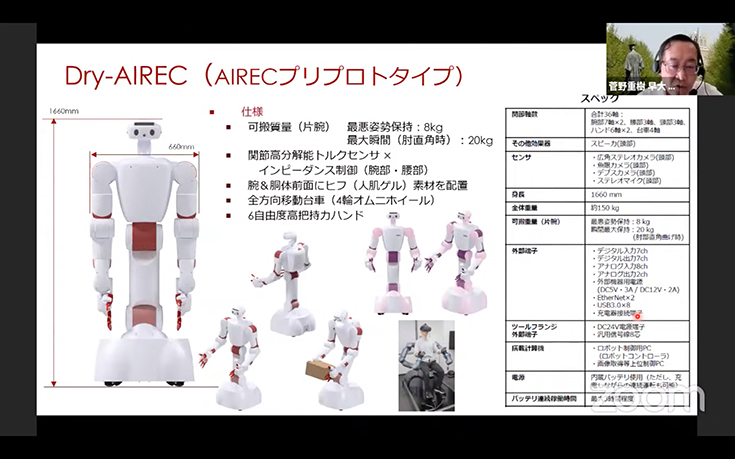
合計36軸を持った上半身型ヒューマノイドで、全方向移動台車の上に乗っている。可搬重量は瞬間的には片腕20kg、両腕で40kg。関節には高分解能のトルクセンサを内蔵している。ほぼ人の作業ができる可動範囲はカバーできているという。これをマスターフォロワー機能を使って教示をするところから開発を進める。菅野教授は関節インピーダンス制御によって人の動作への追従や、環境への接触を伴う作業が比較的容易にできる様子を示した。人とのコミュニケーションやインタラクション、医療福祉への適用など、これから様々な実験を行う。

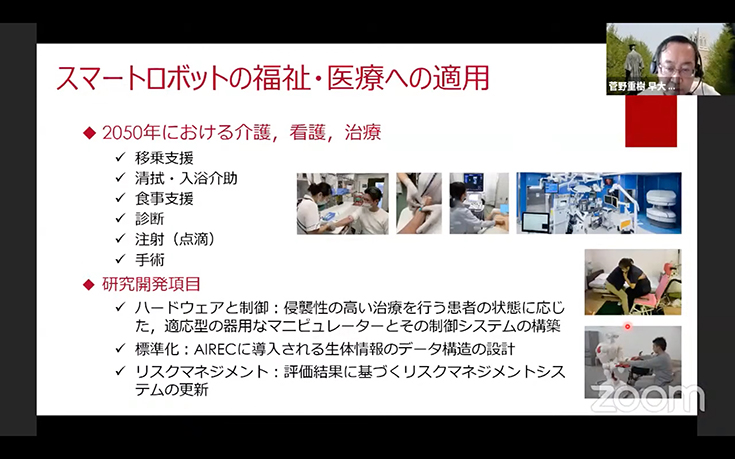
さらに将来は、侵襲性の高い治療を行う患者に対するアプローチの実験も行う。ELSI、大規模な社会ニーズや受容性の評価も並行して行う。
「多様な環境に適応しインフラ構築を革新する協働AIロボット」

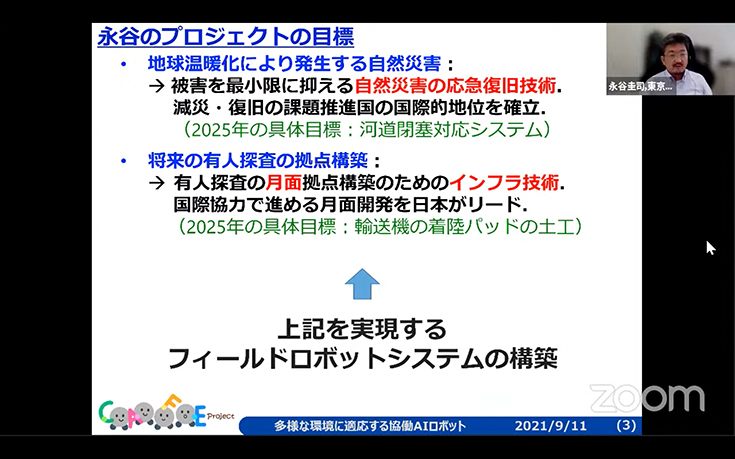
東京大学大学院工学系研究科 総合研究機構 i-Constructionシステム学寄付講座 特任教授の永谷圭司氏は「多様な環境に適応しインフラ構築を革新する協働AIロボット」について紹介。は通称「CAFE(Collaborative AI Field Everywhere) Project」と呼んでいるという。そして「開いた設計」という考え方を重視しながらプロジェクトを進めていると語った。
2050年におけるフィールドロボットには、地球温暖化により発生する自然災害の応急復旧や、将来の有人探査での月面拠点構築のためのインフラ技術などが期待される。つまり、人が入れないところでも活躍できるロボット技術だ。これに対してバックキャストして今は何が必要かと考えたとき、2025年においては「河道閉塞対応システム」と「輸送機の着陸パッドの土工」の2つの技術構築を目標とした。
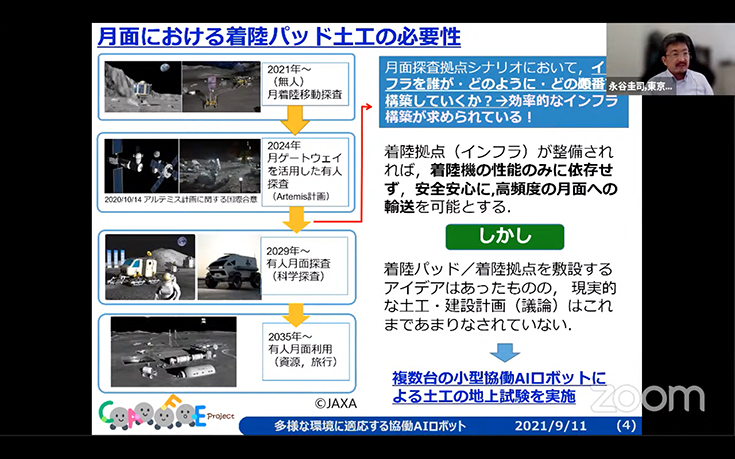
後者は月面での着陸拠点の土工・建設を想定したもので、複数台の小型協働ロボットによる土工の地上試験を考えているという。
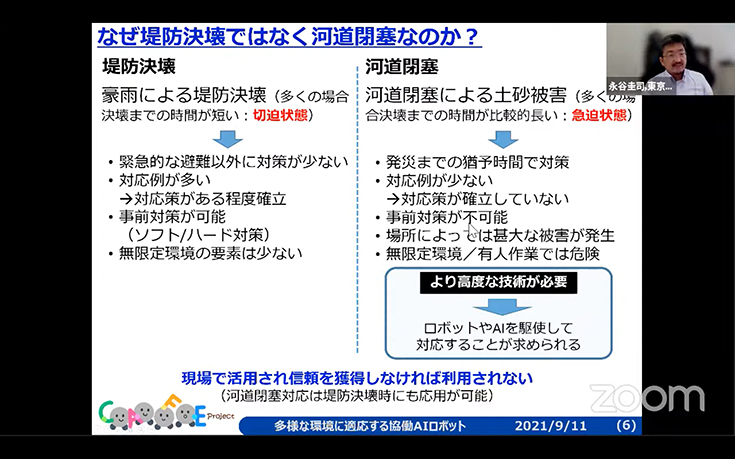
前者の「河道閉塞対応システム」とは、地滑りなどによって河川がせき止められ天然ダムになり、大きな土石流を起こしてしまうようなケースを想定したもの。水位を下げる作業をロボットにやらせようとしている。堤防決壊は緊急避難以外に対策がないが、河道閉塞は徐々に水位があがっていくため対策が可能であり、そこにAIやロボットを投入することで、有人による危険性を減らし、予定外の事象にも対応させようというわけだ。
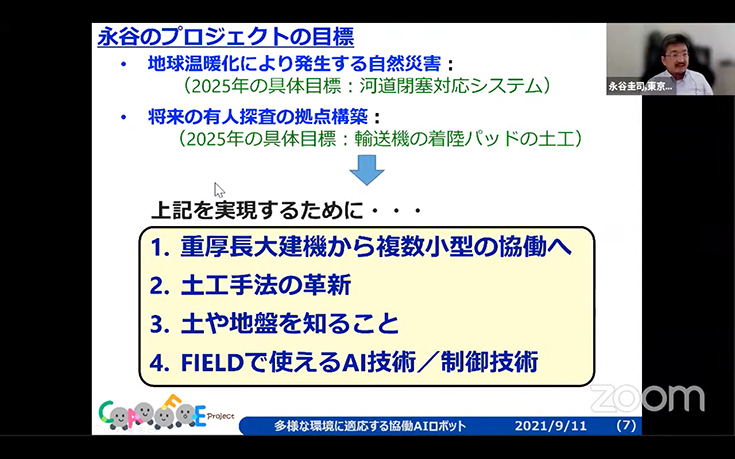
このために、「重厚長大建機から複数台小型の協働へ」、「土工手法の核心」、「土や地盤を知ること」、「FIELDで使えるAI技術/制御技術」を実現しようとしている。つまり小型のロボット機器を使って、新しい手法で、扱いが難しい土を操作し、そのための技術を開発しようというわけだ。
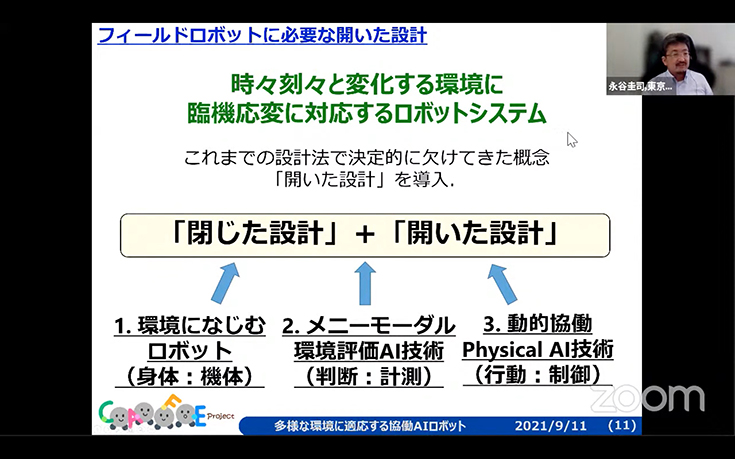
その4つを行うためには、「開いた設計」が重要だと永田氏は続けた。閉じた設計とは現在の主流アプローチで、既知の場面を想定してハード・ソフトウェアを設計して挑もうというものだ。だがフィールドではそれはうまくいかない。あらゆる場面を想定すると発散してしまう。状況把握が重要になるがセンシング・作業能力にも限界がある。だから時々刻々変化する環境に対して臨機応変に対応するロボットシステムが必要であり、そのために「開いた設計」が重要だと考えていると述べた。
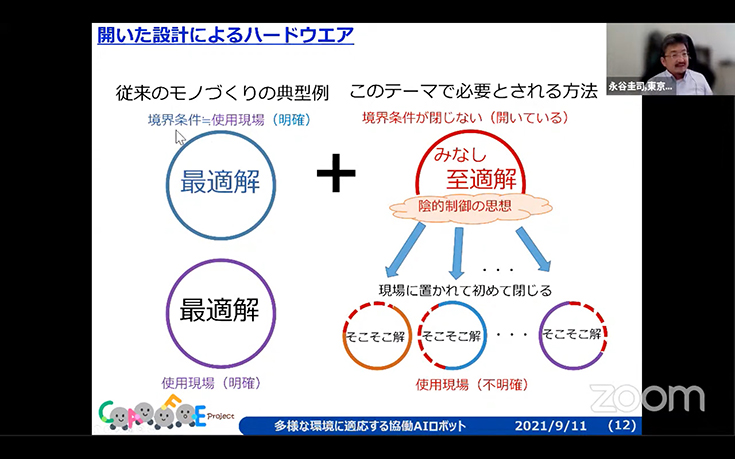
従来は境界条件を考えて使用現場を考えるので最適解で動かすことができるが、だが実際の野外現場で境界条件は作る段階ではわからない。そのため「見なし至適解」を考える必要がある。これを大阪大学の大須賀教授がいうところの「陰的制御」の概念を使って解ける、そこそこ解で対応していく必要がある。そのためのキーが小型、ヘテロ、軽量、柔軟、冗長ロボットが重要になるという。
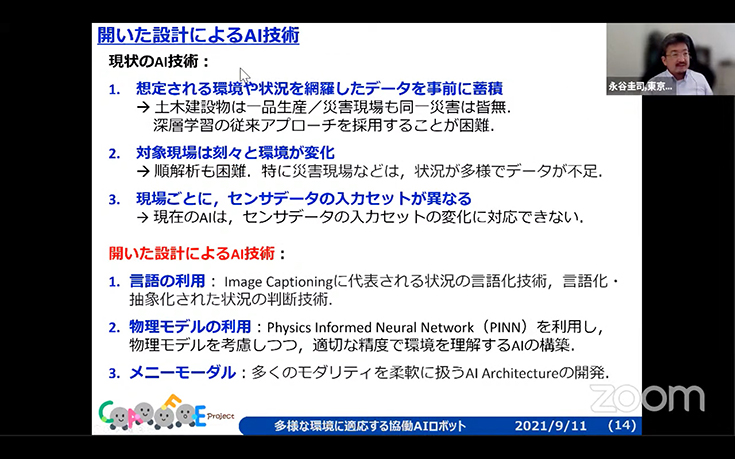
AIに関してもロボットに対してはまだまだのレベルにある。今後は言語、物理モデル、メニーモーダル(多数のモダリティ)を利用することで対応しようとしている。制御にもAIを用いる。ドメインランダム化シミュレーションという手法を使って、戦略転移学習を用いる。複数台のロボット制御についても環境やモデル、目的のダイナミクスの埋め込みを行なった上で協調できるようにする。
「人とAIロボットの創造的共進化によるサイエンス開拓」

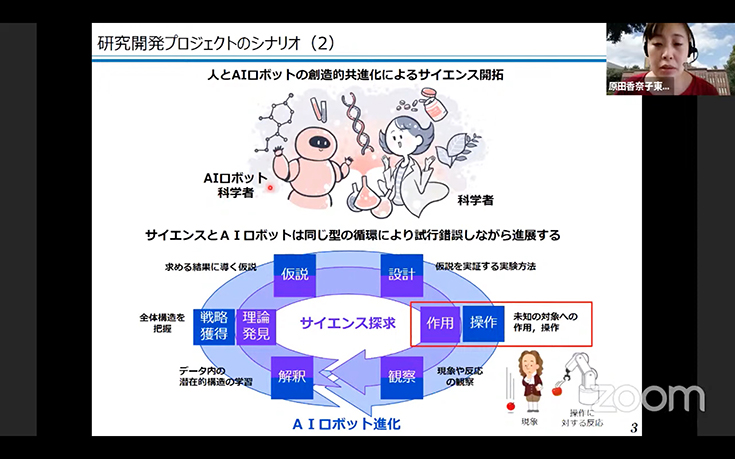
東京大学大学院工学系研究科 准教授の原田香奈子氏らは、自動でサイエンスを探求する自律型AIロボットの開発に挑んでいる。AIロボット科学者と科学は、同じ型の循環により試行錯誤しながら進展しているという。求める結果に仮説を立て、実験方法を立案し、観察し、そのなかの構造を発見する。これが理論発見になるし、AIロボットの戦略獲得になる。ロボットを使うことで単に観察するだけではなく、意図的に対象に操作を加えることがメリットだという。
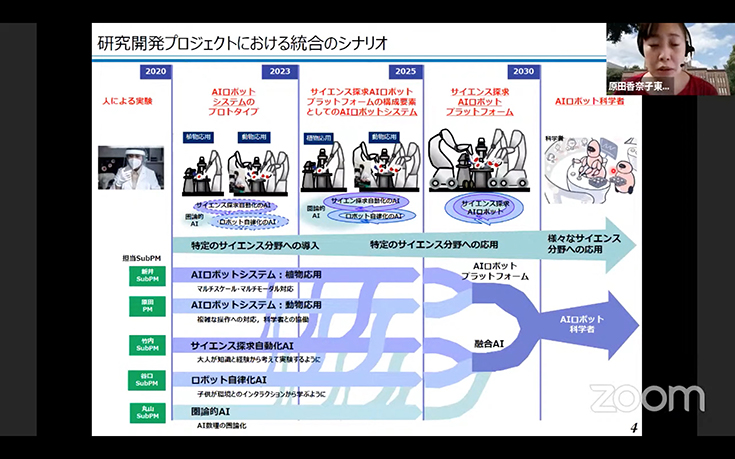
ムーンショットはバックキャスト型プロジェクトだ。2050年に様々なサイエンス分野に使えるロボットを開発するために、2023年にはシステムプロトタイプ開発を目指す。柱は5つ。マルチスケール・マルチモーダル対応のAIロボットシステムの導入、複雑な操作の対応や科学者との協働に重きを置いたもの、大人が考えるように探求するAI、そして環境とのインタラクションから学ぶAI、そしてAI数理からのアプローチを行う圏論的AIを重視する。
対象分野は植物と動物。植物については遺伝子改変なしで過酷環境でも植物を育てることを目指す。シロイヌナズナをモデルとし、植物の薬、農薬を代替できるバイオスティミュラントを開発する。また栄養面でも好適培地を探索し、豆苗のように何度も何度も刈り取れるような植物栽培の実現を目指す。
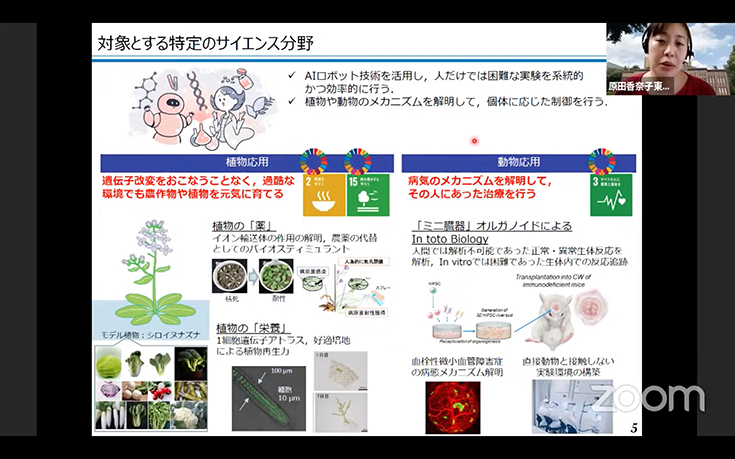
動物については病気のメカニズムを解明して、その人にあった治療を行うことを目指す。具体的にはオルガノイド(ミニ臓器)を用いる。オルガノイドをマウスの頭蓋内に移植して、人間では解析不能だった生体内での反応を観察する。病態メカニズムを観察したり、直接動物と接しない実験環境を構築する。
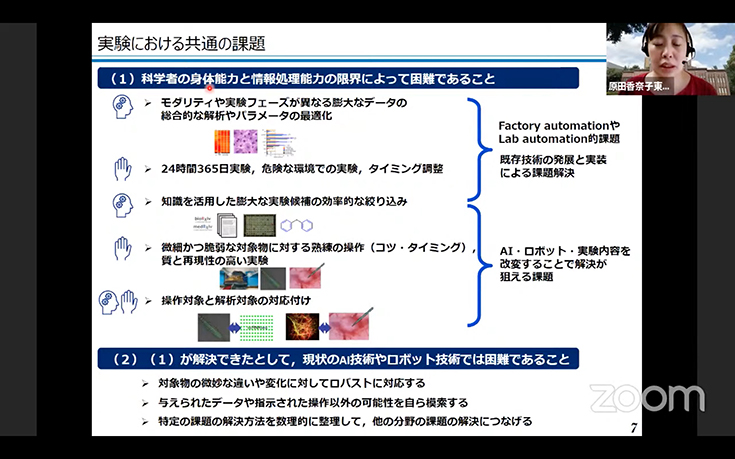
最終的には科学研究での汎用化を目指すため、現在、それぞれの実験の共通点を洗い出しているという。膨大な文献のサーベイや、膨大なサンプルに対して詳細な解析を行うことが共通していると見て、それらの自動化を目指す。単にロボットを並べるだけではできない実験の改善なども目指しているという。また、対象物の微妙な違いや変化に対するロバストな対応、与えられたデータや指示以操作以外の可能性の模索、特定課題の解決方法を数理的に整理して、他の分野の解決につなげることなども目指す。
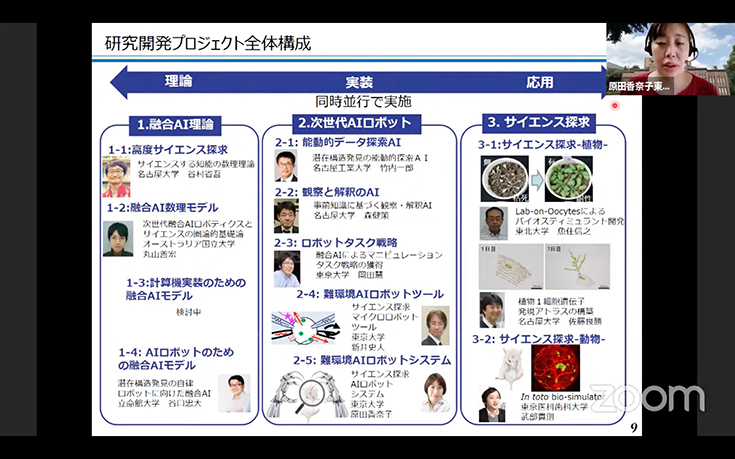
サイエンス探求自動化のループと、ロボット自律化のループを組み合わせて、実際にロボットが実現できるサイエンス構築を目指す。そして汎用化への数理基盤の構築を目指す。理論と応用を同時平行で行うことが特徴で、プロジェクトマネジメント面でもチャレンジングだという。
「活力ある社会を創る適応自在AIロボット群」
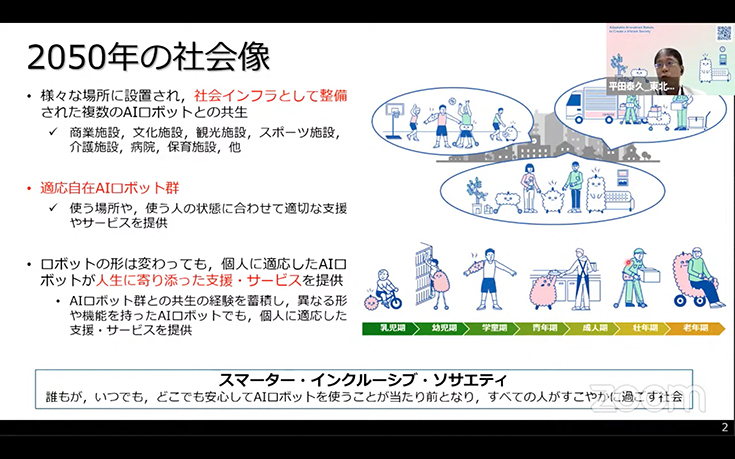
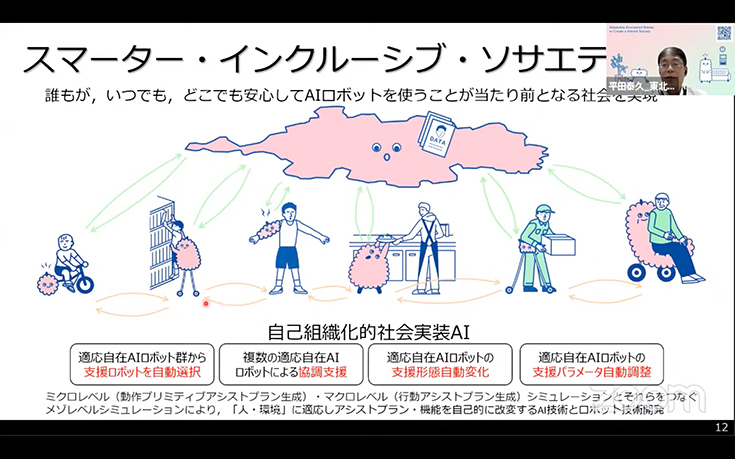
東北大学大学院 工学研究科 ロボティクス専攻 教授の平田泰久氏は、複数のAIロボットを使って人を支援するプロジェクトについて紹介した。様々な場所に、様々なかたちのロボットが社会インフラとして整備され、誰もが使える社会を実現したいと考えているという。そのためには適切な適応能力が必要になる。そのようなロボットが多数で人を支え、最終的には人生によりそい、人をサポートすることを目指す。かたちを変え、使い分けることで途切れのない社会を実現し、それを「スマーター・インクルーシブ・ソサエティ」と名付けている。
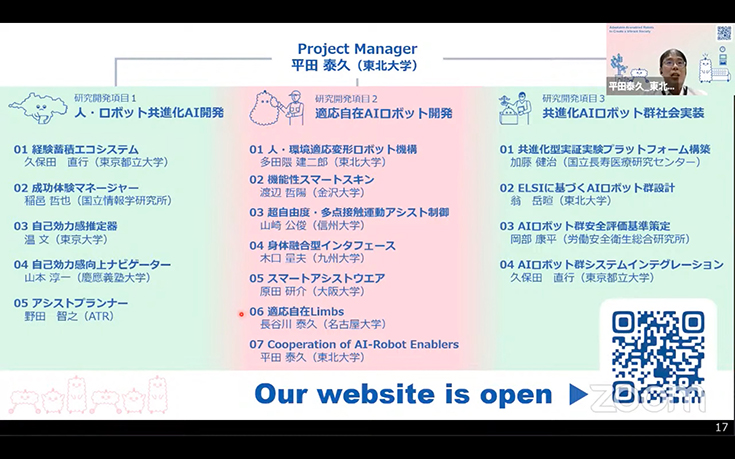
このために3グループを作っている。ロボットのAIを開発するグループ、ハードウェアを開発するグループ、最終的社会実装を進めるグループだ。
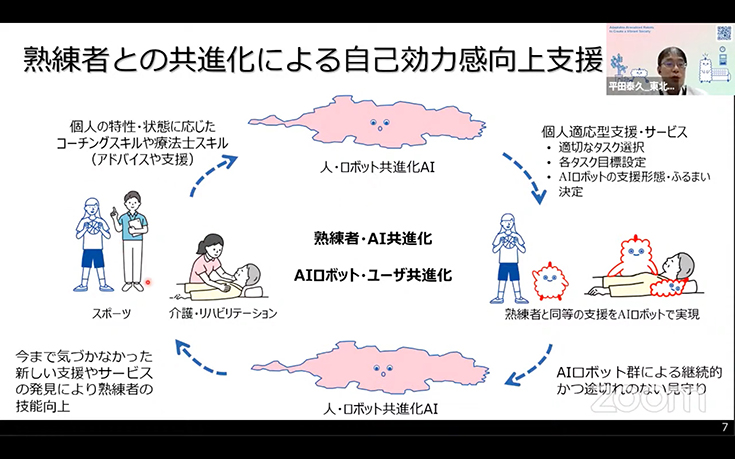
まずAIは、ロボットによる過度な支援を提供せず、人が自ら行動するための適切な支援をするためのAIを開発する。キーワードは「自己効力感」。「ある効果を生み出すために必要な行動を、どの程度うまくできるか」という感覚で、自分の行動の可能性の認知として捉えることができる。そして、人が、ロボットと一緒ならば新しいことに挑戦できると思えるようなAIの実現を目指す。まずはスポーツや介護・リハビリをアプリケーションとして、熟練者と同等の支援をAIロボットで実現する。そうすれば人とロボットの共進化が可能になり、新しい支援への気づきが生まれると考えているという。それがさらに好循環を生み出すことを目指す。
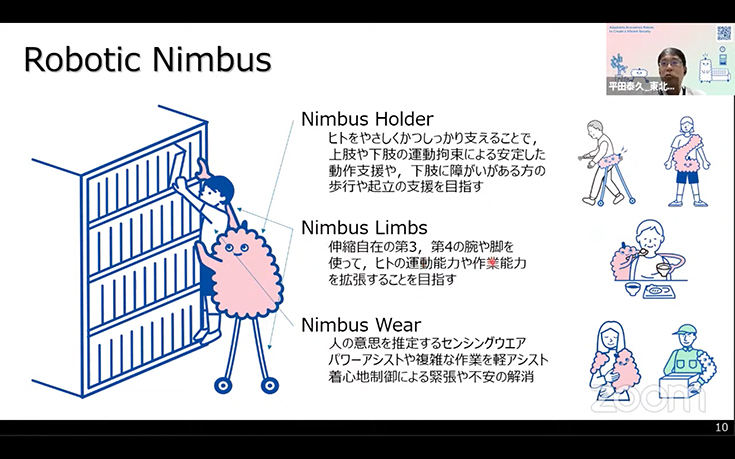
ハードウェアについては、人に安全かつ適切な支援を行うために、「西遊記」に出てくる「如意棒」や「筋斗雲」のようなものを想定し、人や環境に自由自在に適応できる適応自在AIロボット、人を支援する「Robotic Nimbus(ロボティック・ニンバス)」を提案する。Nimbusとは地上におりた神の周囲を取り巻く光の 雲、人の身辺や物の周囲に漂っている雰囲気を意味する。必要なときにやってきて、意志通りに動かせるようなロボットだという。
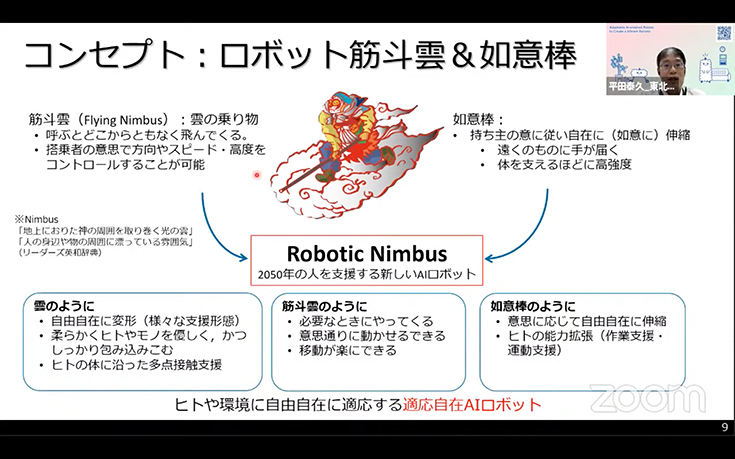
具体的には、様々な形状に変形して人を支えるアームやレッグ、ウェアのようなものを目指す。
社会実装に関しては、「スマーター・インクルーシブ・ソサエティ」実現のために適切なロボットの選定、複数ロボット協調、支援形態自動変化、支援パラメータ自動調整などの研究を行う。シミュレータを使い人と環境に適応できるロボットシステム開発を目指す。
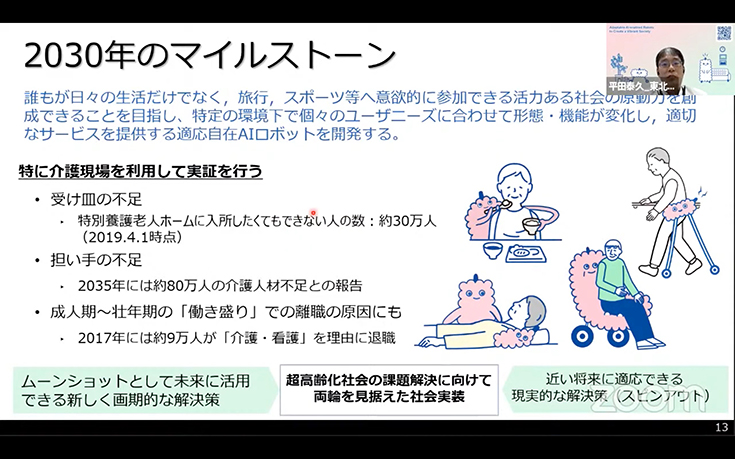
2030年のマイルストーンとしては介護・看護を対象とし、適応自在ロボットを開発する。全く新しい画期的解決策を目指すという。人ができること・できないことの指標は現状では人が目で判断しているが、AIによって自動判別させる。さらに自己効力感も加味して、自信の有無も自動判別。どのくらい人が実際にできる・できないかを判定し、ケアプランを自動作成し、いつどこ誰にどんな「Robotic Nimbus」を適用すればいいのかを自動決定するシステムを目指す。
社会実装については、安全の評価基準、ELSIなども考慮した研究も並行して行う。自己効力感を取り入れた従来にないリスクアセスメントも取り入れる。平田氏は「ロボットを使って人を支援するときの問題をきっちり考えたい」と述べた。また情報管理の研究も行う。



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
森山 和道PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

