
株式会社チトセロボティクスはロボットシステム開発者向けのプログラミングソフトウェア「crewbo studio」の提供を開始したことを発表した。同ソフトウェアはキャリブレーション不要、ティーチングレスで、柔軟物の高精度ハンドリングを可能にする、新しいリアルタイムビジュアルフィードバック制御を活用できる。メーカーの生産管理部門やロボットシステムインテグレータの活用を想定する。
キャリブレーション不要で0.02mmの高精度制御
「crewbo studio」はチトセロボティクスの独自制御技術を実装したプログラミングソフトウェア。カメラなどのビジョンセンサ情報を即時にロボットにフィードバックすることで、環境の変化や外乱に強い制御技術=リアルタイムビジュアルフィードバック制御に特化している。カメラによって周囲を常に認識し、ロボットの手先軌道を調整することで、キャリブレーション不要で、移動する対象物のトラッキングや、柔軟なワーク物体の高精度な位置決めを可能にする。
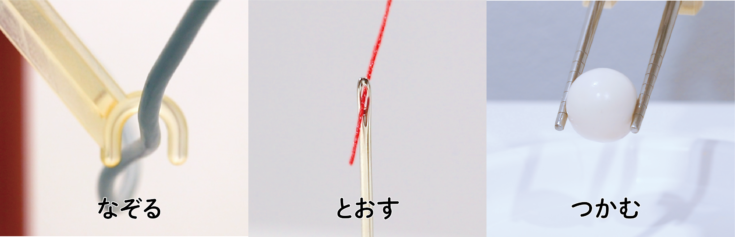

「crewbo studio」で制御プログラムを作成することで、製品やロボットシステムを環境の変動に強い、柔軟性のあるシステムにすることが可能。たとえば、変形しやすい食品やケーブルのハンドリング、移動するAGV搭載ロボットアームの制御、変更頻度の高い商品の仕分けなど、これまで実装が困難だった案件を自動化するロボットシステムを構築できる。
「crewbo studio」の特長
・手先位置決め精度0.02mmまで制御可能
・変形しやすいワークも高精度に制御できる
・ロボット・カメラキャリブレーション不要
・カメラは固定しなくてもOK
・ロボットアームのたわみに影響されない
・力覚センサなしでも高精度挿入を達成
・柔軟エンドエフェクタにも対応
高機能なアドオンキット
crewbo studioは基本パッケージにアドオンキットを導入することでさらに機能が拡がる。
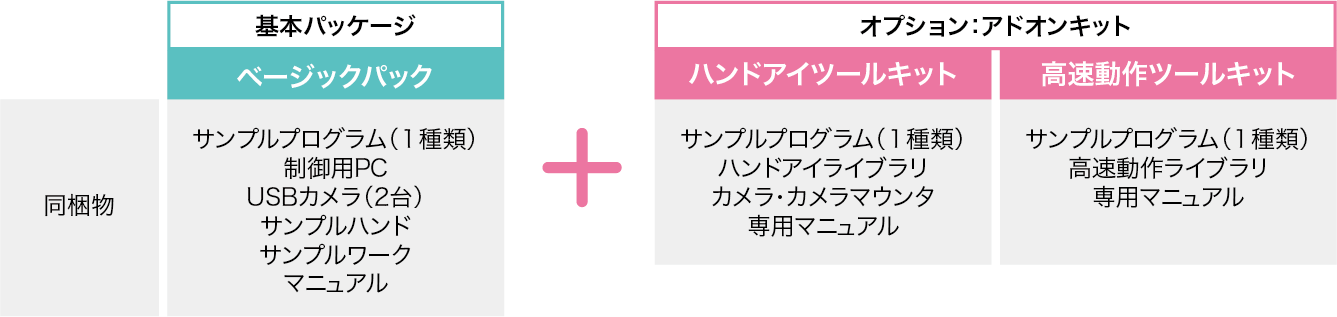
<ハンドアイツールキット>
ロボットアームの先端にカメラを搭載するハンドアイ構成によって、カメラの視野が拡がり、実装できる自動化作業が増える。「ハンドアイツールキット」はリアルタイムビジュアルフィードバック制御をハンドアイ構成で使用するためのアドオンキット。カメラが常時動き続けるハンドアイならではの制御の難しさをなくす。移動物体のトラッキングや、エンドエフェクタ(ロボットハンド)制御との相性もばっちり。
<高速動作ツールキット>
チトセロボティクス独自の軌道生成技術を適用することで、ロボットアームの現在の速度ベクトルを破壊しないように新軌道を生成して誘導し、タクトタイムを犠牲にせずにリアルタイムビジュアルフィードバック制御を活用できる。crewbo studioと高速動作ツールキットなら、ワンタクト2.0秒以下も実現可能。
トレイの洗浄業務を自動化するロボットシステム「crewbo トレイ system」チトセロボティクスが提供開始
チトセロボティクスが時給980円の「ロボット労働力」サブスクを発表!初期導入費なく、ロボット導入を手軽に安く
チトセロボティクス関連記事



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
山田 航也PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

