

立命館大学は、理工学部 川村貞夫教授が研究責任者を務める研究プロジェクト「CPS構築のためのセンサリッチ柔軟エンドエフェクタシステムの開発と実用化」について、報道関係者向けに説明会を開催した。
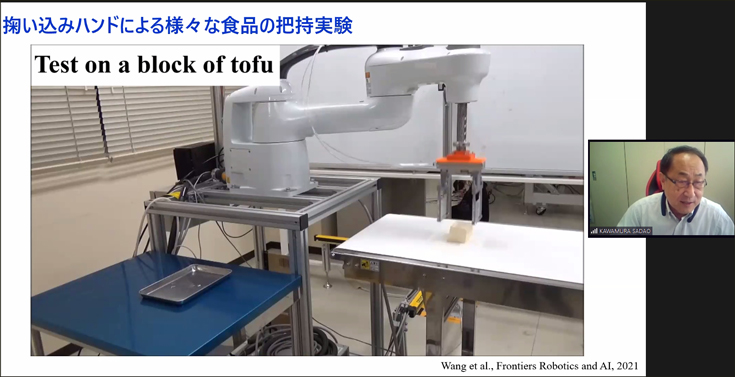
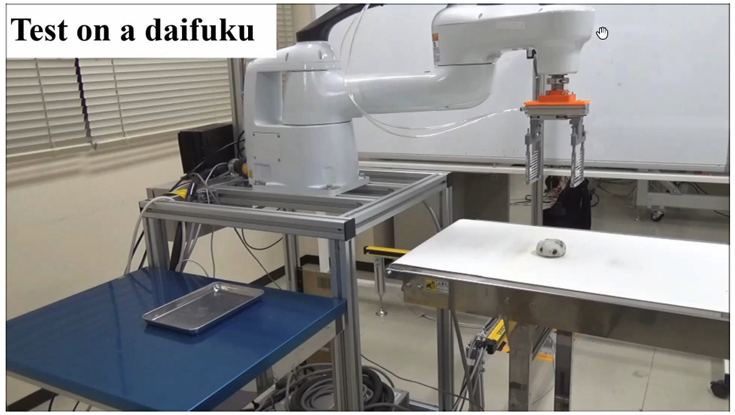
主に飲食業界に役立つと思われる「モノをつかむ」(把持)作業に役立つ技術研究で、デモ動画ではロボットハンドで、大福、天ぷら、たこの足、豆腐、うずらの卵など、様々の形状や硬さのものを把持する様子を公開して基礎研究技術を発表した。これはロボットによる盛り付け作業の自動化に繋がる技術だ。


また、宴会後の下膳作業を移動式ロボットが片付ける様子なども披露した。

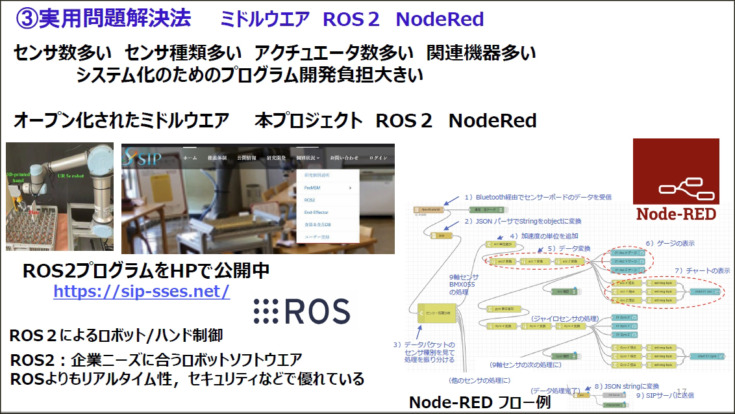
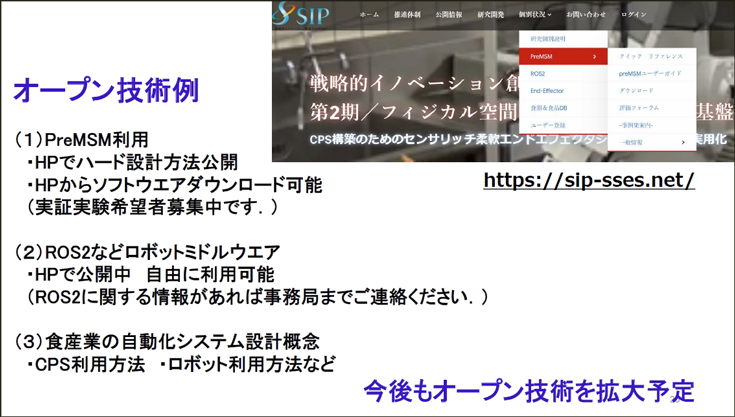
なお、これらはROS2環境で開発されていて、研究結果の一部は既にホームページ(https://sip-sses.net/)等で一般公開が開始されている。
■天ぷら盛り付け実験
■モバイルマニュピレータによる食器自動回収
■食洗器 最新研究 業務用無人食洗機ロボット
なお、運動知能研究室の発表「食器洗浄と天ぷら盛り付け自動化のためのロボットシステム」がFOOMA2021のAP賞グランプリを受賞した。
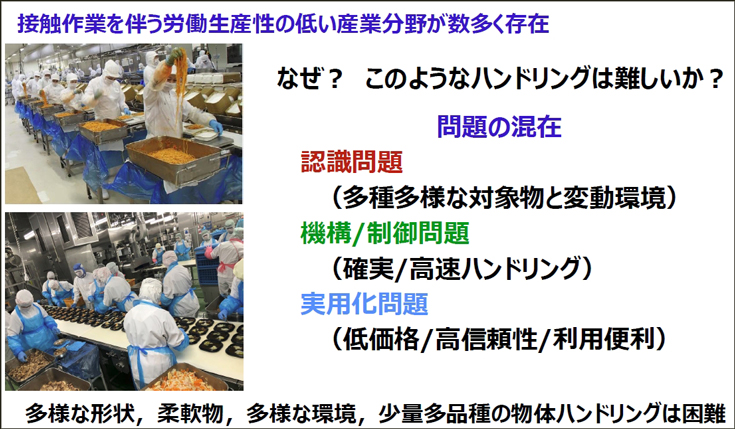
食品産業・飲食業界でのロボット活用の課題
川村教授らが携わるこのプロジェクトは、内閣府が中心となり関係省庁・機関が連携して推進する「戦略的イノベーション創造プログラム(SIP)第2期/フィジカル空間デジタルデータ処理基盤」の一部として実施されている。
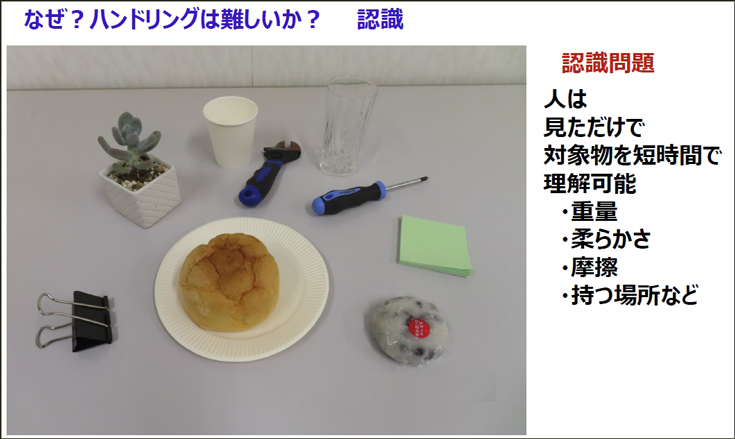
解決すべき課題は「労働力不足」。既に工場ではロボットの導入が盛んに行われ、自動化の推進と労働力不足への対策が進められているが、食品産業・飲食業界でのロボット活用はこれまで難しいとされてきた。その最も大きな理由は「人の手のようにきめ細やかで柔軟な作業をつかむ」ことがロボットでは困難だったこと。
「センサリッチ柔軟エンドエフェクタシステム」(SSES)はこの課題を解決し、飲食業界の自動化を進める一端となることが期待される。川村教授は「この技術は将来、メーカーやSIerによって飲食業界等のロボットに活用され、自動化による労働力不足の解決に貢献できればうれしい」と語る。
サイバー空間とフィジカル空間のつながりを容易に
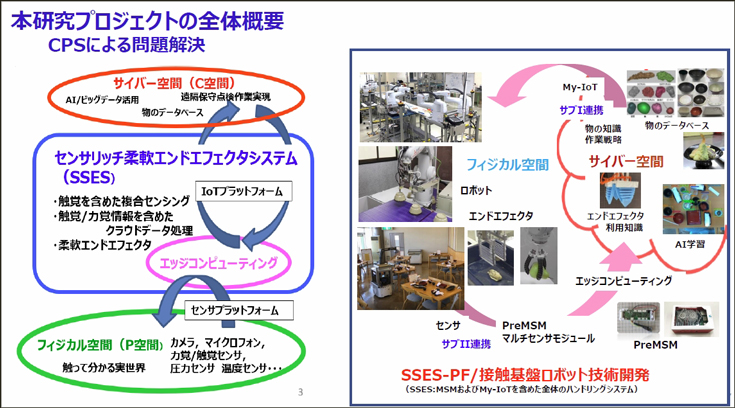
このプロジェクトでは、C空間(サイバー空間)とP空間(フィジカル空間)のつながりを容易にするためのシステム開発や、機構的に柔軟性をもつエンドエフェクタ(ロボットアームの先端につけるハンド部分:グリッパ等)などの開発に注力している。
前者はいわゆるデジタルツインで、リアル(フィジカル)な環境の情報をデジタル空間(サイバー空間)に送り、最適な把持や作業をリアル空間にフィードバックする(返す)システムだ。これによって、従来の単一作業が得意なロボットアームに対して、人間に近い「見て・判断して・加減して」つかむ、作業することが可能になる。
なんでもつかめるロボットハンドの研究
後者はロボットハンドで、大福やコロッケ、豆腐など、様々な形状・柔らかさのものを把持する技術だ。考え方で面白いのは「機能と知能に分けて考えた場合、あまり知能に負担を掛けないことが大切」(川村教授)ということ。機能で実現できるものはやろう、言い換えれば必要以上に知能に依存しないこと、と説明する。
■飲食業界向けロボットハンドのデモ動画(報道発表会にて) 立命館大学提供
川村教授は「ディープラーニングによるモノの判別を必要とする把持技術は、今回のようなケースでは賢い選択ではないと考えている」と続ける。
例えば、AIと画像認識の技術によって、つかむモノに合わせて把持する技術を開発する方法もあるが、それよりもなんでもつかめるハンドができないか、まずはそれに挑戦するという考え方だ。
「モノを判別したり、特性に合わせた把持を工夫しなくても持てるハードウェアがあれば、判断時間も不要になって作業時間も短縮できる。ロボットによる自動化で作業時間が早いということはとても重要なこと。とはいえ、そうは言ってもハンドのハード技術で掴めないものは出てくるので、そのときはAIを投入して対応していく」(川村教授)と語った。
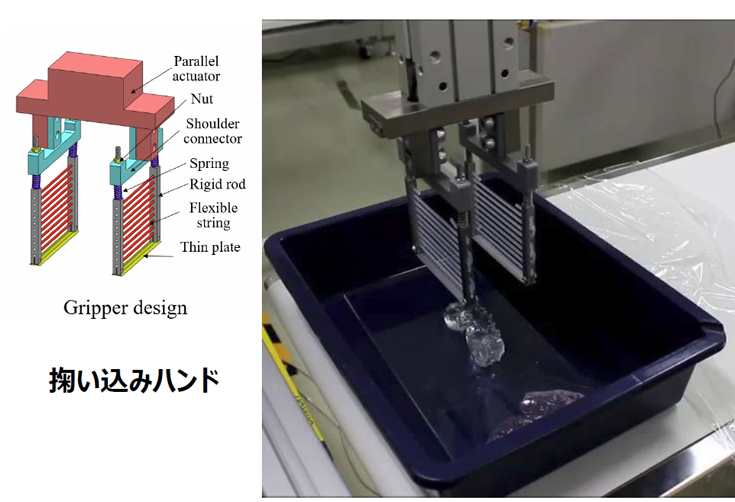
ロボットハンド(エンドエフェクタ)を柔軟化することで、環境や対象物による違いを柔軟性によって吸収し、ロボットと対象物間に大きな力の発生を避けることが第一の作業だ。
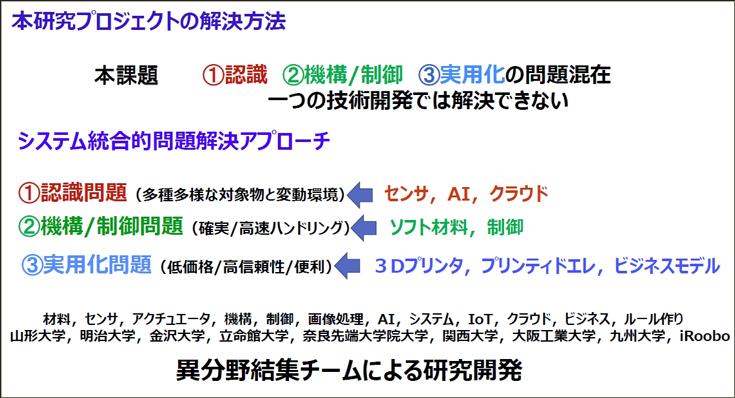
そして、画像では得られない粘弾性や摩擦などの情報を、逆に積極的に対象物や環境に機械的に接触することで取得する。「力/接触の情報を加えたAI/IoT技術」は、従来の視聴覚情報に力/触覚情報を加え、AI技術を活用してエッジコンピューティングによる認識やクラウドでの認識を行うことに繋げることで「認識問題」を解決しようという試みだ。
多数の企業/団体に協力を呼びかけ
このプロジェクトでは、前述のように自律移動型ロボットを使って、全自動での下膳システムの実用化にも取り組んできた。下記の動画ではAlexaを通じて音声コマンドにも対応している。
■モバイルマニュピレータを使った下膳作業(Node-REDを使ってセンサデータの収集)
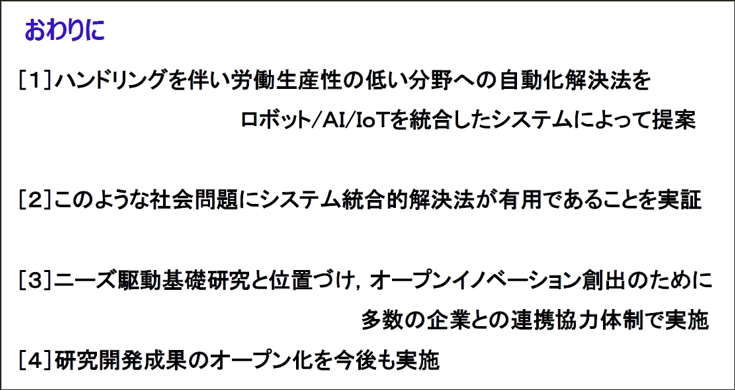
川村教授は「ロボット/AI/IoTを統合したシステムによって、ハンドリングを伴い労働生産性の低い分野への自動化解決法を提案したい」とし、「これをニーズ駆動基礎研究と位置づけ、オープンイノベーション創出のために多数の企業との連携協力体制で続けていきたい」と語った。
研究を開始して3年半(全期間は5年)。このタイミングでプレス説明会を行った意図について川村教授は「この研究を事業化として本格的に実現するためには、より多くの実施者や協力者が必要であり、これらの技術が必要な多くの日本企業に広く展開されることが重要」とし、「協力支援企業/法人。推進協力企業/法人など、この技術や実用化に興味のある方は事務局まで連絡をください」と呼びかけた。
「なぞる・とおす・つかむ」を簡単に実装 チトセロボティクスが開発者向けソフトウェア「crewbo studio」を発表
トレイの洗浄業務を自動化するロボットシステム「crewbo トレイ system」チトセロボティクスが提供開始
油圧や空圧、「フルードパワー」がロボットを動かす 課題は売り方? IFPEX2021レポート
自律式の果実収穫AIロボットのプロトタイプを発表 人とほぼ同じ速さでリンゴなど果実を収穫 農研機構/デンソー/立命館が開発
立命館 関連記事



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
神崎 洋治PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

