
人間共存ロボットの実現を目指す東京ロボティクス株式会社は新型の全身人型ロボット『Torobo』の性能動画を公開したことを発表した。
人型ロボット『Torobo』について
Toroboは人と共存するロボットの研究を加速するために開発された全身人型ロボットで、人間のように重たい物を持ち上げる力を持ちながら、関節を柔らかく制御することで、人や環境、対象物との接触を安全に行うことができる。JSTムーンショット型研究開発事業(目標3:一人に一台一生寄り添うスマートロボット)における早稲田大学AIRECプロジェクトにおいても、一部改造して使用されている。

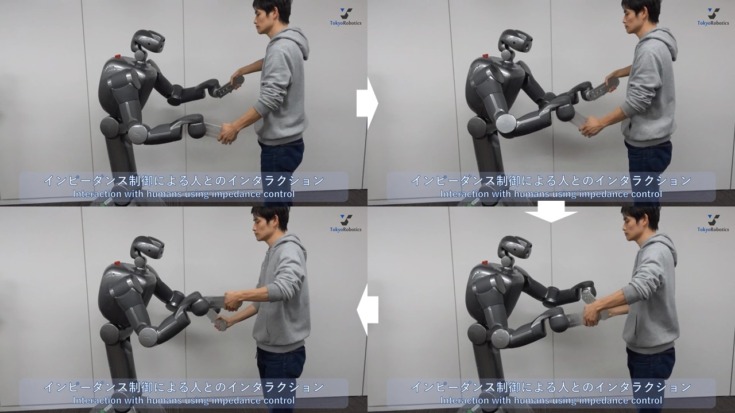
人とのインタラクション
Toroboは各関節に高分解能トルクセンサを搭載し、人との接触において柔らかく動作できるため、人との積極的なインタラクションが可能。
両手を握って上下左右に大きく振る動作
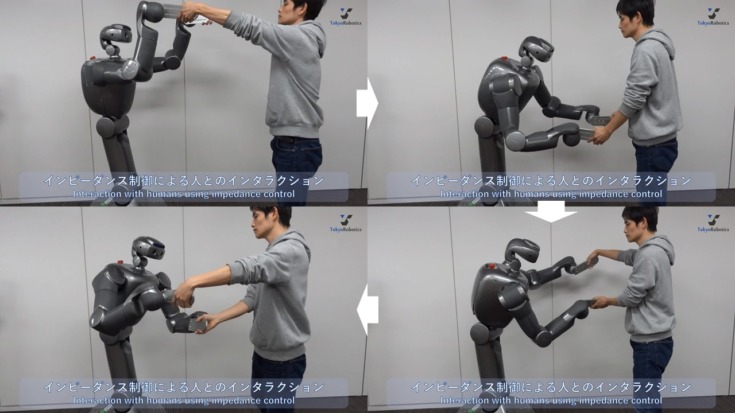
両手を握って腕をしならせる動作
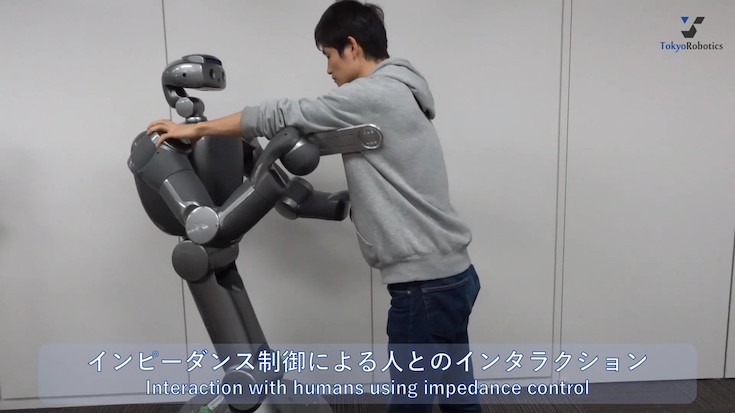
人に前方から押された動作
高度な力制御
カルテシアンインピーダンス制御により高度な力制御を実現している。X,Y, Z軸のそれぞれで柔らかさを変化させることや、手先位置を固定したまま姿勢変更を行うことができる。
X,Y,Z軸の柔らかさの設定

手先位置を固定したままの姿勢変更

卵を使った柔らかな接触動作

産業用水準の高い剛性と可搬重量
産業用としても通用する高剛性・高出力の機械設計を行っており、振動の抑制と人並みの重量物の把持が可能。

胴体と肘の接触回避
冗長自由度をうまく活用し、胴体と肘が接触しないような干渉回避制御を行っている。

ダイレクトティーチングからの軌道の自動生成
Dynamic Movement Primitivesという手法により、一つの動作を教示した後に、スタート位置、ゴール位置、軌道、および遷移時間をある程度変化させてもタスクを遂行できるような仕組みを実装している(社内研究開発用)。
力制御技術により軽い力でダイレクトティーチングを行うことができる。

軌道の所要時間を指定してプレイバックが可能。
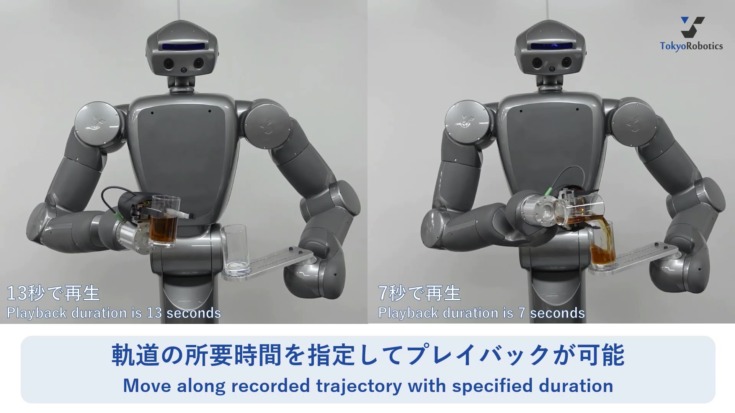
スタート位置・ゴール位置の変化に自動で対応する。

東京ロボティクスについて
東京ロボティクスは『人間共存ロボット』の実現を目指す早稲田大学発のロボティクススタートアップ。同社が目指す『人間共存ロボット』とは、製造現場だけでなく私生活を含めた様々な場面で、人に寄り添うロボットを指している。創業間もない時期は力制御可能なロボットアームや双腕ロボットの開発を中心に行ってきた。近年はこれまでの研究成果を更に前進させた力制御可能な最先端人型ロボットを開発するとともに、人間共存ロボット実現に必要な要素技術として、ビジョン(3次元カメラ)や画像認識・機械学習、遠隔操作など研究領域を広げている。また、研究開発にとどまらず社会実装する事業も加速し、多くの大手企業と共同開発を進めている。「買ってもらえるロボット」を常に意識し、創業以来7期連続増収・全期黒字を達成している。

東京ロボティクス株式会社
【動画】ネットワークを介して人型ロボットを力制御 東京ロボティクス、NTTコム社との取り組みを公開
東京ロボティクス モータメーカの五十嵐電機製作所と資本業務提携 2億円を資金調達
東京ロボティクス、小・中規模の物流施設向けロボット『モバイルグリッパ』を開発 異なる段ボールを潰さずに把持、運搬
東京ロボティクス関連記事



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
山田 航也PR







このカテゴリの新着記事

注目のロボット









注目のロボット企業







連載・コラム

