シルバーウィークの9月22日(火)、23日(水)に開催された「特大ペッパソン」に行ってきました。

参加者75名が2日間かけて行う史上最大のPepperハッカソンなので「特大ペッパソン」なのです。
イベントの説明はこちらになります。
https://mashupawards.doorkeeper.jp/events/30795
今回のAPIパートナーから今回提供いただけるAPIのご案内です。みんなで今回のペッパソンに使えそうな機能をメモしていきます。
最初はPepperの紹介で、ソフトバンクロボティクス(アルデバラン)河田さんです。
河田さんの自己紹介です。小学校からプログラミングしていてIT業界の技術者として20年。2010年にNAOに強く可能性を感じ、2012年にNAOを個人所有しました。2015年にAldebaran Robotics に転職されて、現在は、ソフトバンクロボティクスにて Pepperコミュニティを広げる取り組みに従事しています。
河田さんの個人ブログは、僕らも以前から何回も読んでいました。まだ読んだことのない方は、是非ご覧ください。ロボット愛がビンビン伝わって来るブログです。
アンオフィシャル – Aldebaran Robotics NAO とそのほかロボットについて
http://tkawata.hatenablog.com/
今日の特大ペッパソンに参加した人への参加特典をご案内。

特典その1。Pepper公式開発本を無料プレゼント!
特典その2。Pepper App Challenge 2015 Winter の応募支援!

ということで、今日のペッパソンは Pepper App Challenge Winter 2015 の前哨戦だったりします。
Pepper の機能概要を説明です。
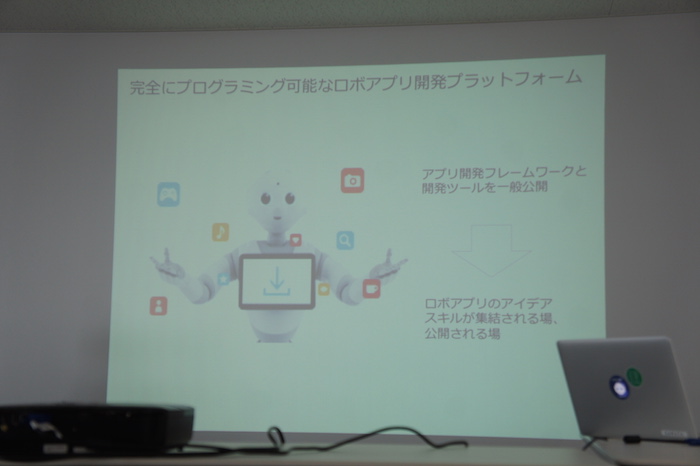
Pepperは、完全にプログラミング可能なロボアプリ開発プラットフォームです。アプリ開発フレームワークと開発ツールが一般公開されています。ロボアプリのアイデアスキルが集結する場、公開される場でもあります。
Pepperが行えることの一覧です。
動かす
・オリジナルの動きを作る
・すでに用意されている身振りを自分のアプリの中で使う
・移動
コミュニケーションをとる
・音声認識
・音声合成
・音楽を再生
タブレットを利用する
・画像、HTMLページ、動画
・タッチ検出
人を認識する
・顔認識
・感情認識
・年齢推測
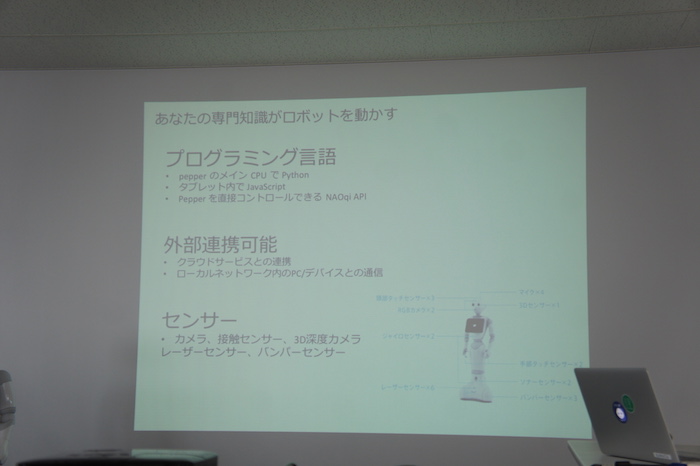
Pepperのハードウェア、ソフトウェア等です。
プログラミング言語
・PepperのメインCPUでPython
・タブレット内でJavaScript
・Pepperを直接コントロールできるNAOqi API
外部連携可能
・クラウドサービスとの連携
・ローカルネットワーク内のPC/デバイスとの通信
センサー
・カメラ
・接触センサー
・3D深度カメラ
・セーザーセンサー
・バンパーセンサー
Pepperで出来ないこと、してはならないことです
・(Pepperが手を使って)ものを持ち上げる
・フラットではない場所での移動
・外見の改変
本日のペッパソン内で、初心者向けミニワークショップを開催します。
2日間のペッパソンを支えるPepper技術サポートスタッフも、会場の奥でバッチリ待機しています!困った時は駆け込みましょう!


ソフトバンクロボティクス(アルデバラン)河田さんからは以上です。



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
北構 武憲PR







このカテゴリの新着記事





注目のロボット









注目のロボット企業







連載・コラム

