

2018年9月18日、立命館大学プレスセミナーが東京都内で行われた。テーマは人材不足を背景とした「ロボットシステムインテグレータ育成」。生産年齢人口の減少を背景として産業用ロボット市場は活性化している。だが一方で、ロボットや設備を組み合わせてシステムにするシステムインテグレーター(SIer)人材は圧倒的に不足している。その現状と課題が、学と産、それぞれの立場からレクチャーされた。
システムインテグレーションの科学はまだまだこれから

まず最初に「学から見たロボットSI研究の課題と実例」と題して、立命館大学理工学部ロボティクス学科教授で、ロボティクス研究センター長、そして立命館大学発ベンチャーである株式会社チトセロボティクス副社長の川村貞夫教授からレクチャーが行われた。
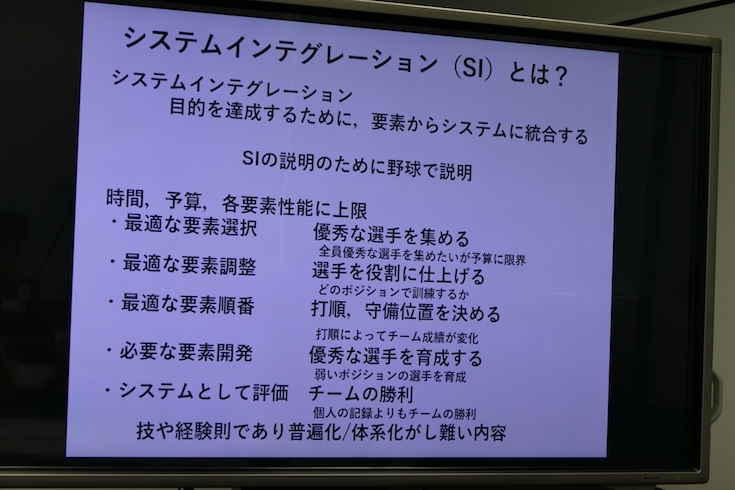
川村教授は最初にシステムインテグレーション(SI)とは「目的を達成するために、要素からシステムに統合する」技術だと紹介し、野球を例に具体的に説明した。時間、予算、各要素性能には上限があり、ばらつきがある。そのなかで最適な構成、要素の順番などを考える。最終的に評価されるのは個人の記録よりもチームの勝利だ。これらは技や経験則であり、普遍化/体系化が難しいという。
いまのロボット開発の方法論は、情報技術、マテリアルとメカニズム、そしてシステムインテグレーションからなると川村教授は考えているという。また科学と技術それぞれの関係を示し、互いに補いあって発展するが、必ずしも同一ではないと紹介。以下の4種類のレベルの違いがあるという。
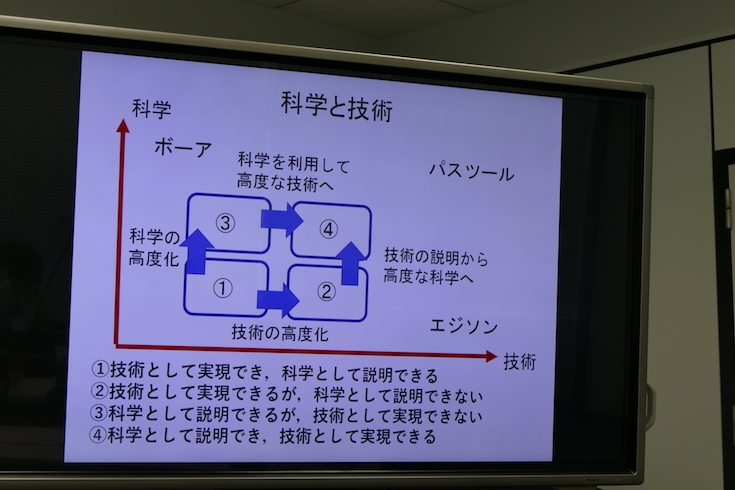
1)技術として実現でき、科学として説明できる
2)技術として実現できるが、科学として説明できない
3)科学として説明できるが、技術として実現できない
4)科学として説明でき、技術として実現できる
1)の段階から、より高度な4)へと移行していくというイメージだ。
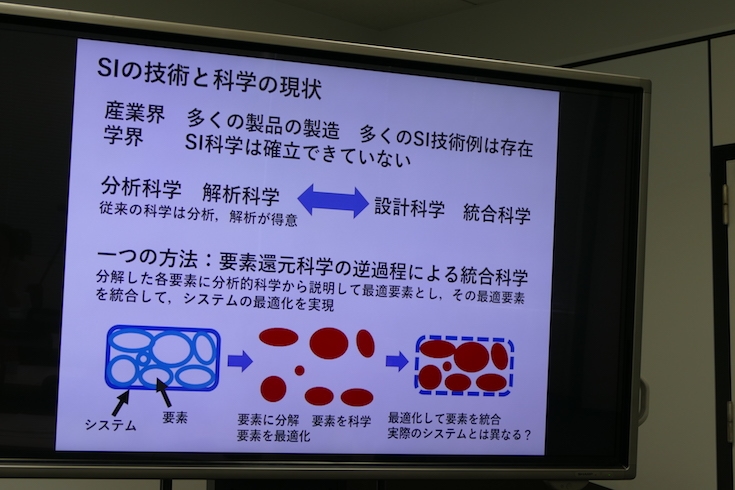
ではSIの科学と技術はどういう関係にあるのか。産業界には多くの素晴らしい技術がある。いっぽう、学のほうではSIの科学は確立できているとはいえない。分析、解析は進んでいるが、設計や統合についての科学はあまり進んでいないからだという。ではどうすればいいのか、一つの方法としては、要素還元科学の逆過程による統合科学が一般的に使われている方法だと紹介した。ただし一つのものをバラバラにしたものを再統合したときに、まったく同じものになるとは限らない。それが要素還元科学の弱点だという。
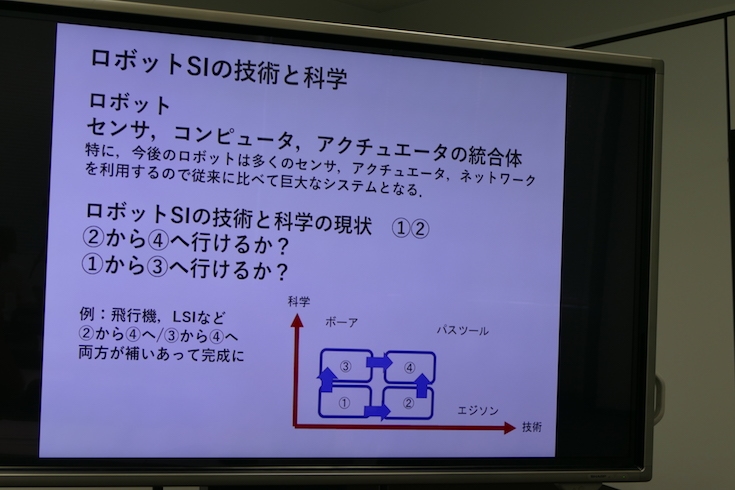
ロボットはセンサ、コンピュータ、アクチュエーターの統合だ。センサーの小型化、ネットワーク化などによって、ロボットはどんどん巨大なシステムになっている。ではロボットSIはどのように発展させればいいのか。ロボットはまだ科学・技術としてもまだまだであり、統合する部分が弱い。今後、大きく発展するためには、SIの科学が必要になると強調した。
優れた産業用ロボット技術や工場設備の科学的説明が必要であり、要素還元型の逆過程だけではない視点でシステムインテグレーションを捉える必要があるという。
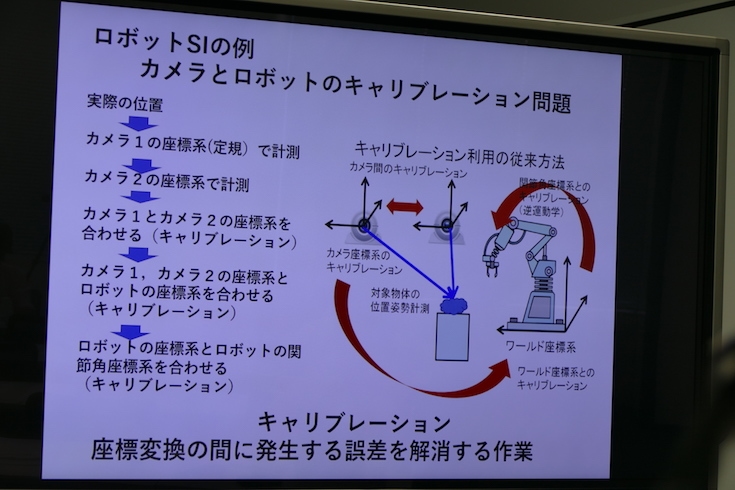
ロボットSIの例として、川村教授はカメラとロボットのキャリブレーション問題を取り上げ、独自のビジュアルフィードバック制御技術「ALGoZa(アルゴザ)」を紹介した。キャリブレーションとは、「物差しの違いのすり合わせ」、すなわち座標変換の間に発生する誤差を解消する作業だ。ロボットの場合は、カメラやロボットの関節角度をすり合わせていく必要がある。
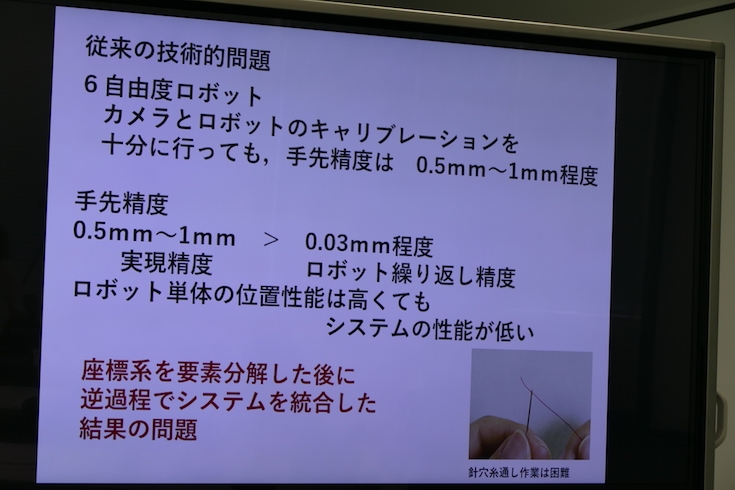
単純な作業に思われるが、現実には難しいのがキャリブレーションだ。6自由度ロボットでは十分にカメラとロボットのキャリブレーションを十分に行なっても手先精度は0.5mmから1mm程度にとどまる。実際のロボット単体の繰り返し位置精度は0.03mm程度であってもそうなってしまうのだ。これでは針穴に糸を通すような作業は難しく、つまり単体性能は良くても、システム全体の性能は低い状態にとどまってしまう。これは前述の「座標系を要素分解した後に、逆過程でシステムを統合した結果の問題」の例の一つだ。
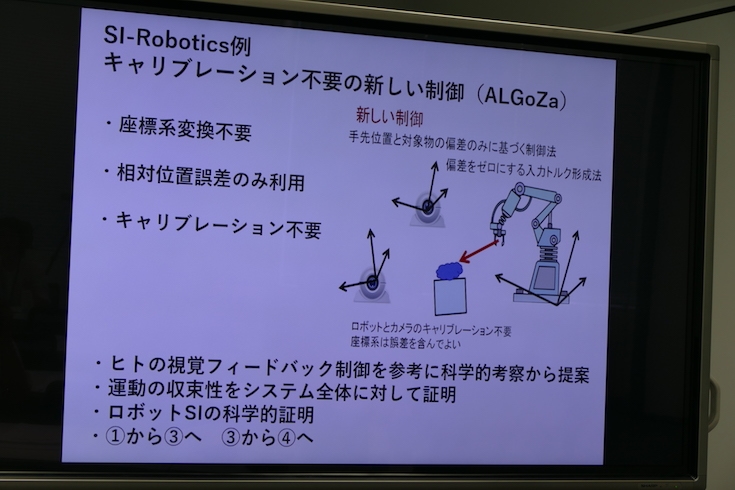
川村教授らが提案する「ALGoZa」は座標変換を行わない。手先位置と対象物の偏差のみに基づく制御方法で、相対位置誤差のみを利用して偏差をゼロにするように入力トルクを生成する。カメラとロボットのキャリブレーションは不要で、誤差を含んで良いという考え方だ。ヒトの視覚フィードバック制御を参考に提案したものであり、運動の収束性をシステム全体に対して証明できるという。
この技術を提案していたが、なかなか使ってもらえるところがなかったので、自らベンチャー「株式会社チトセロボティクス(http://chitose-robotics.com、代表取締役社長は西田亮介氏)」を起こして、現在、事業に取り組んでいると紹介した。
最後に川村氏は、ロボットにはSIの科学と技術の両方が必要であり、学術界はSI科学の高度化に努力すべきであり、人材育成が重要であると同時に、社会的認知度の向上が必要だと締めくくった。学術界でも、これまでは単なるケーススタディとして評価しなかったことも多かったが、それも変化しつつあるという。
生産システムは合理的な妥協の産物、優れたもの=ベストではない

続けて「産から見たロボットシステムインテグレータの現状と課題」と題して、FA・ロボットシステムインテグレータ協会参与、一般社団法人日本ロボット学会(RSJ)フェロー、三菱電機株式会社FAシステム事業本部 主席技監の小平紀生氏がレクチャーを行なった。
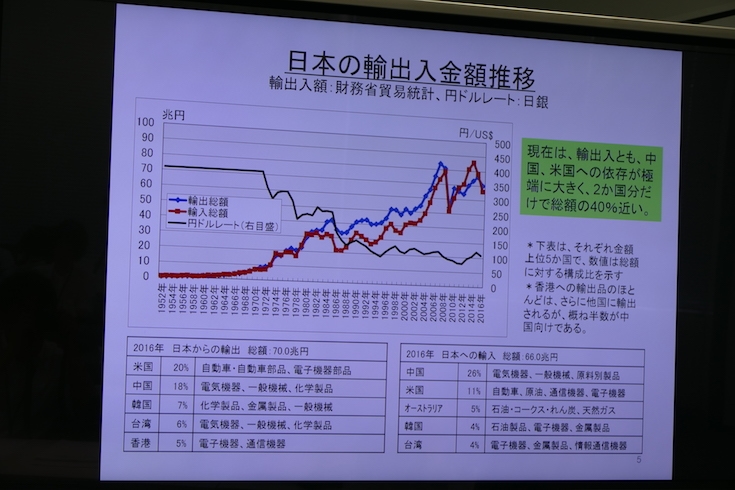
製造業の60年間の発展の歴史を振り返ると、高度経済成長を経て安定成長、そして失われた20年を迎えて苦しんでいる。海外生産も増えているが国内が伸びていない。輸出入で見ると、相手国がアメリカと中国に大きく偏っている。特に2000年代からこの傾向が顕著だ。
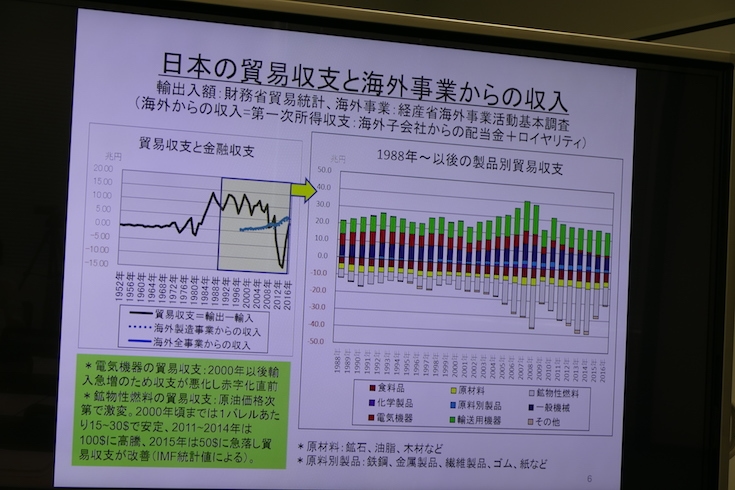
品目別に見ると、電気電子系の黒字がほとんどなくなっていることがわかる。中国からの電気電子系輸入品が増えている。特にハイテク製品の国内生産能力を高める必要があるという。
日本の製造業の根本的問題として、キープロダクトの生産を国内に戻すべきであり、国内の製造業の産業構造改革によって雇用を増やすことが重要だと語り、日本の生産性がよくない状況になってきたことを人件費のせいにしすぎであり、優れた自動化が必要だとと指摘した。
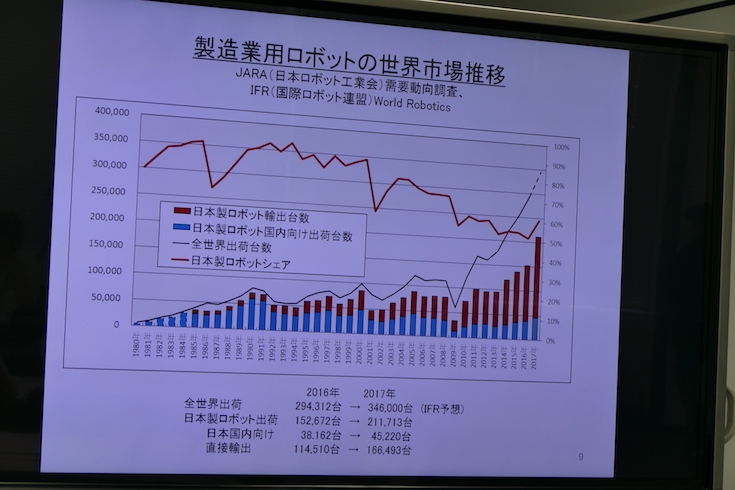
ロボット産業自体は現在絶好調だ。2004年くらいから上向きはじめ、輸出台数も増えている。今年度の受注額はおそらく1兆円を越すと考えられている。だがロボット産業も輸出に偏ってしまっている。輸出先のトップは中国で、作られたロボットの1/3が中国に出荷されている。実際にはもっと多いと考えられている。
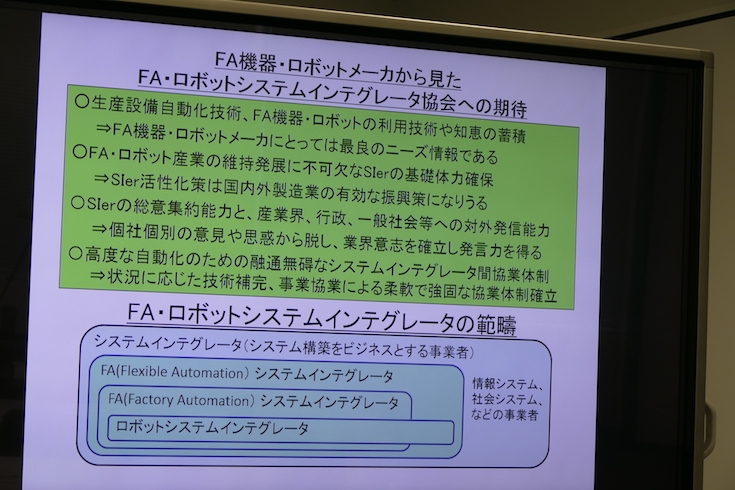
ロボット産業の国際競争力は、材料・要素技術と、システムエンジニアリングの二つにわけて考えられる。両方必要だが、産業界ではロボットを生産システムに組みこむ必要がある。
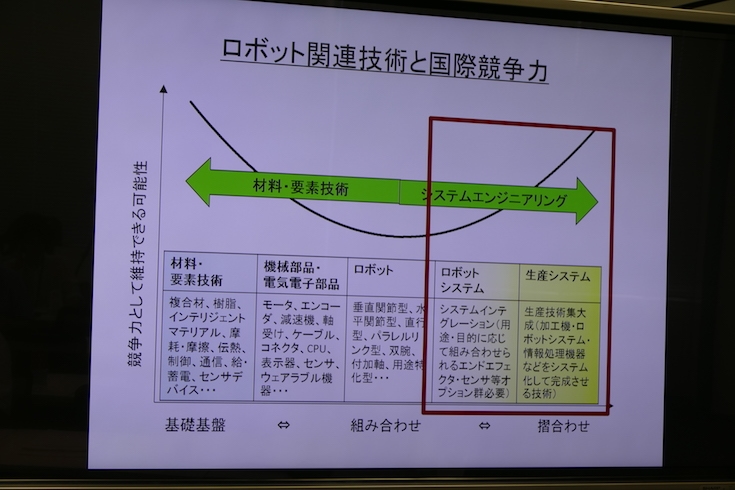
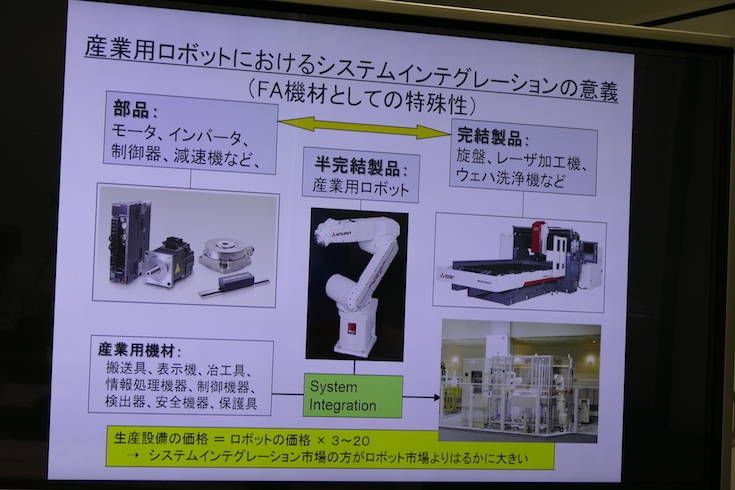
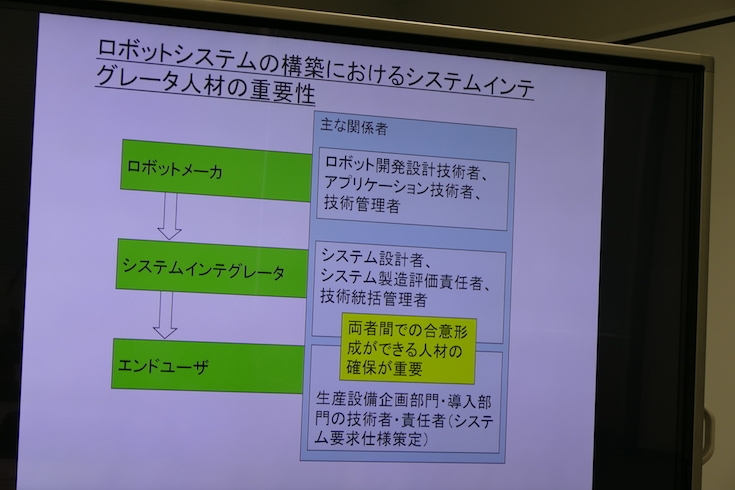
ロボットは「半完結製品」であり、各種部品や設備と組み合わさなければならないからだ。生産設備の価格は、ロボット単体の価格の3倍から20倍くらいにもなる。それを組み上げるのがシステムインテグレーターだ。
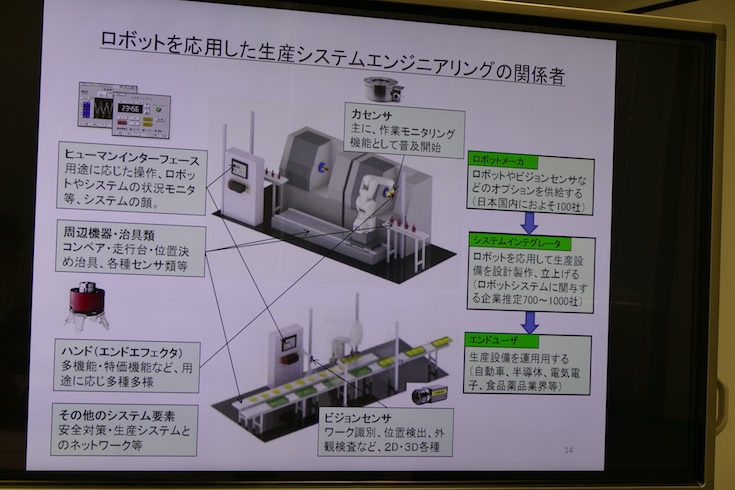
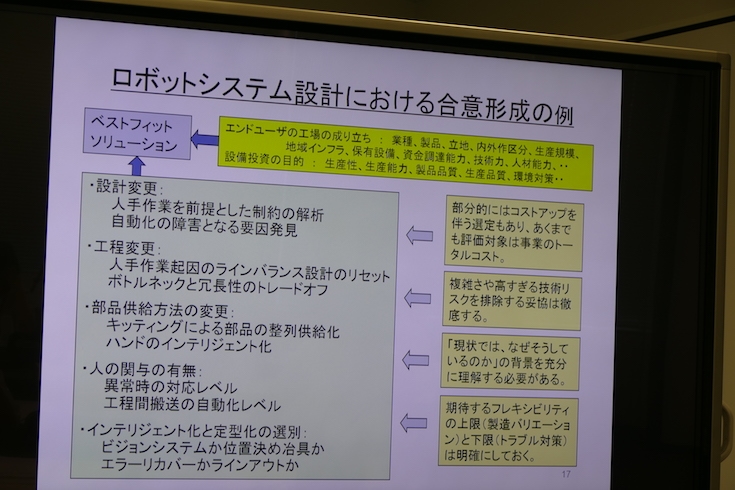
エンドユーザーがシステムインテグレーション能力を持っていることもあるが、専門業者が行なう場合もある。基本的にシステム設計を行なって顧客事情を鑑みながら、達成目標・仕様を決めて組んでいくことになる。顧客・現場の実力によって適した自動化レベルが違うため、技術的にもっとも優れたものが優れているかというと、そうでもない。顧客側に難しいシステムを運用する能力がない場合は、生産能力を阻害してしまう。また市況の変化への対応も必要だ。
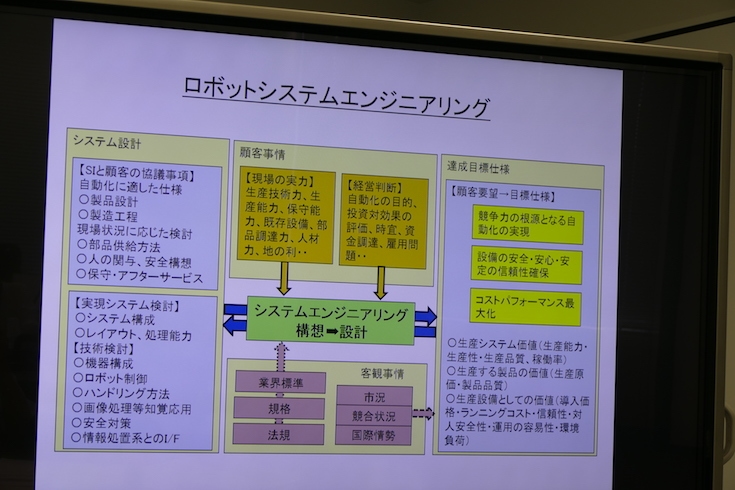
システムインテグレーターとエンドユーザーの合意形成は非常に難しいという。たとえば安全設計はISOや法律による規定がある。だがそこでそれぞれ知識の齟齬が生じる場合が多いのだという。要素選択においては、その顧客に対してベストなソリューションは何かを見つける必要があり、それは千差万別だ。上流、下流、どこまでを自動化するのかはケースバイケースだ。使う道具は一緒でもいろいろなケースがあるという。
JARA(一般社団法人日本ロボット工業会)は「FA・ロボットシステムインテグレーター協会(http://www.farobotsier.com)」を2018年7月に設立した。140社程度の会員企業のマッチング、体質強化、技術強化を目的としている。それぞれ得意な技術が事業者によって違うので、それを相互補完しながら大きな仕事をできるようにしようというものだ。国内には良い技術がいっぱいあるが、どのように組み合わせればいい答えが出るかはこういうところにあるという。
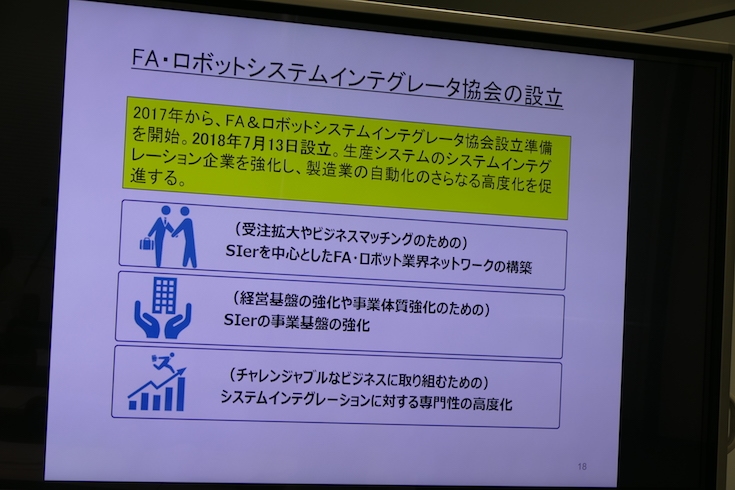
システムインテグレーターには中小企業が多いが、良い技術はそこに蓄積されており、そのためには企業体力もつけてもらわなければならない。またひとかたまりになることで発言力を増したり、さらに高度な自動化にチャレンジするためには技術力向上が重要だと述べた。
これからのシステムインテグレーターはエンドユーザーに積極的に提案する力が必要となる。小平氏は「システムインテグレーターも言われたまま作るのではなくコンサルティング能力を持つ必要がある」と述べ、仕事そのものが経験則ベースから、もっとサイエンティフィックになる必要があると語って、レクチャーを締めくくった。



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
森山 和道PR







このカテゴリの新着記事





注目のロボット









注目のロボット企業







連載・コラム

