

第35回日本ロボット学会学術講演会(RSJ2017)が東洋大学にて開催された。そんな中、9月12日(火)にはオープンフォーラム「このロボットがすごい2017(http://konorobo.main.jp/)」が行われた。
略称「このロボ」は「新進気鋭の研究者たちがロボットとロボット研究のおもしろさを社会に向けて熱く語るためのイベント」。2015年から開催されており、今回は多様なテーマに取り組む6人の研究者が、自らが取り組むロボット研究の面白さについて語った。
「このロボ」はニコニコ生放送やYoutubeなどでインターネット中継のほかアーカイブも録画で公開されている。ここでは簡単にレポートするが、詳細に興味を持ったらアーカイブを閲覧してほしい(https://www.youtube.com/channel/UC9nhwffBfUQ3L0O38oUlUJA)。
「プライベートでロボットやるのは楽しい!」

最初に登壇したのは「野生のロボティシスト」を名乗る小倉崇氏。「ROS勉強記録(ROS勉強記録)」というブログや著書『ROSではじめるロボットプログラミング』工学社で、2009年からロボット開発プラットフォームの「ROS(Robot Operating System)」について解説してきた小倉氏は、学生時代に取り組んでいたヒューマノイド「HRP-2」を使ったロボット開発を紹介したあと、社会人になったあとで余暇などの一環として行って来たロボット開発について紹介した。小倉氏が開発して来たロボットの動画は、ニコニコ動画(http://www.nicovideo.jp/mylist/38433301)やYoutube(https://www.youtube.com/ogutti)で公開されている。
矢継ぎ早にルンバを使ったSLAMや自動車にアームを組み合わせたロボット、Pepperを使ったモノマネなどを紹介した小倉氏は「ROSに限らず、プライベートでロボットやるのは楽しい!」と語った。
なお最近はROSではなくRust(Mozillaが開発しているシステムプログラミング用のプログラミング言語。メモリ安全性の保証に特徴があり速度や並列性にフォーカスしている)を使っているとのことで、氏のブログもRustのブログになりつつある。
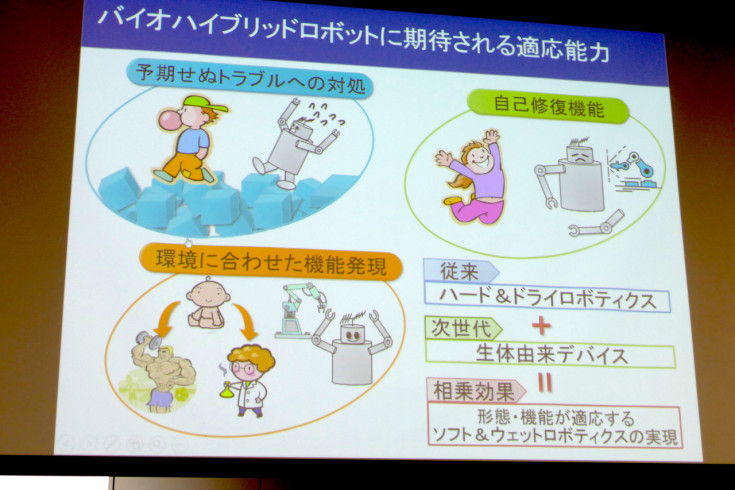
ソフト&ウェットなロボティクスにつながる筋細胞アクチュエータ

大阪大学基礎工学研究科 准教授の清水正宏氏は「生体-機械融合型ロボットのつくりかた」と題して、「究極のソフトマテリアル」である筋肉細胞を使って輪ゴム型アクチュエーターを作る研究を紹介した。生物には自己改変能力がある。だが今の技術ではそれらを人工的に実現して実装するのは難しい。そこで生体自体を直接ロボットに埋め込んだらどうだろうという視点の研究だ。
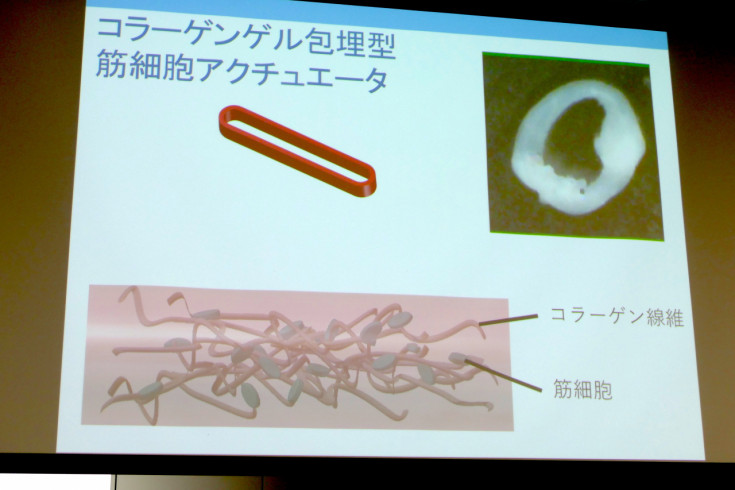
機械部品の場合は特定の機能や仕様を設計して、それに合わせて作る。細胞の場合は環境を使ってうまく誘導してやる必要がある。デバイスの元となる細胞の環境を操作し、形態・機能の発現を誘導する。そのために使えるのが細胞の機械刺激応答だ。細胞は外界からの機械刺激で分化していく細胞の種類を変えることができる。そのような特性をうまく使うことが細胞を部品として使うばあいのコツだとし、コラーゲンゲルを使った筋細胞アクチュエータを紹介した。
細胞とコラーゲンゲルをを培養しながらひっぱってやる。そうするとスパゲッティをフォークで引っ張ったときのようにコラーゲンゲルの方向がある程度そろった状態に配向するのだそうだ。
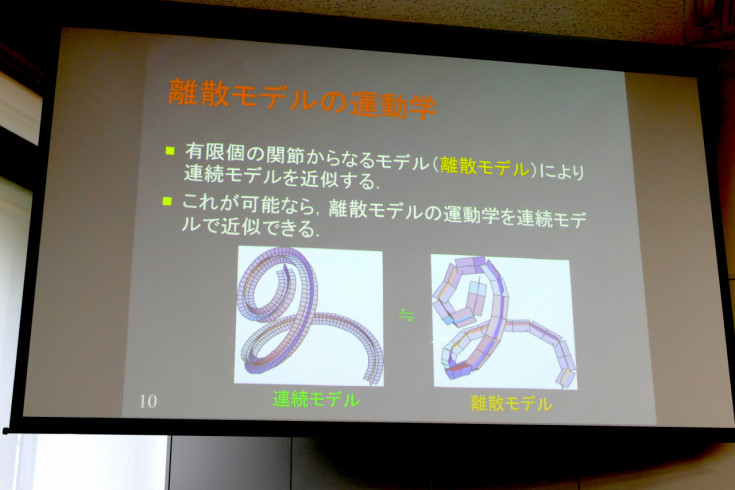
ヘビ型ロボットの実用化

株式会社Hibot メカニカルエンジニアの山田浩也氏はヘビ型ロボットの実用化について語った。ヘビは胴体だけで多様なな動きや作業ができる。その動きを数式で表現できるように解析し、有限個のリンクで作られたロボットで実現できるようにしたのがヘビ型ロボットだ。
山田氏は、実用化に向けた課題を一種の淘汰圧としてロボット研究を推進したいと考えているという。実際に福島第一原発で使われたロボットや、ルクセンサを使って凹凸のある地面でも動けるので巣穴に住んでいる動物の様子を見ることができるロボットなどを紹介した。
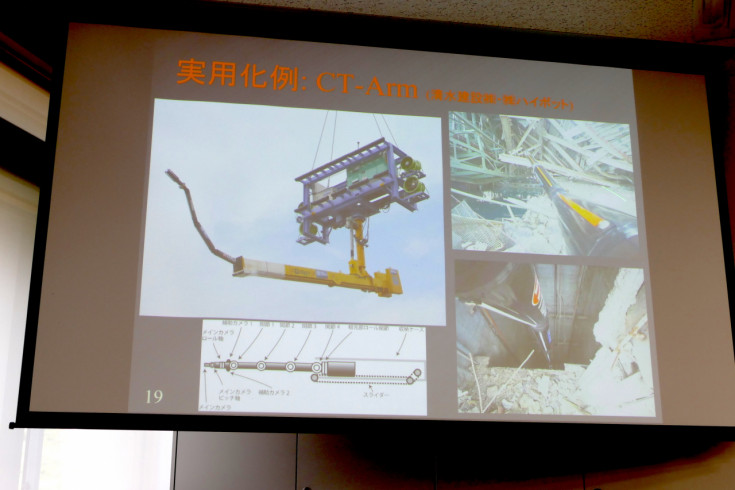
実用化に関して必要なことは、故障しても回収できることや小型化、センサ機能、環境適応力の向上であり、必要以上の機能を省くことだという。
またコストに関してはロボット自体の部品などの費用よりも、人件費の割合のほうが大きいため、むしろ早く作るための工夫がむしろ大事だという。
甲虫の飛行や歩行をコントロールするサイボーグ昆虫

シンガポール南洋工科大学(Nanyang Technological University) Assistant Professorの佐藤裕崇氏は、昆虫に無線コントロールできるチップを埋め込み、筋肉を電極刺激することで、飛行や歩行をコントロールできるようにする「サイボーグ昆虫」の研究を紹介した。
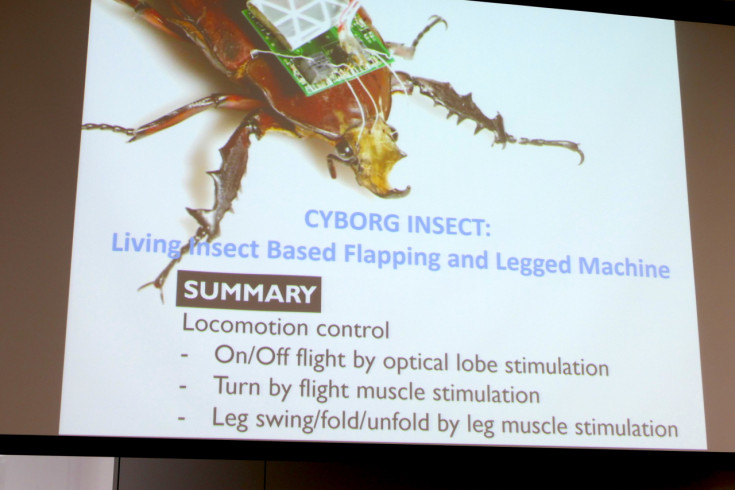
小型飛行体があれば、たとえば災害時に被災者を探索するようなことも可能になる。だが昆虫に匹敵する能力の小型飛行体を作ることは現在の技術では難しい。そこで大型の昆虫である甲虫(カナブン)を使えないかというのが基本的な叶え方だ。カナブンは自分の体重(8g程度)の3割程度のものを載せてもまだ飛べるだけのパワーがあるのだという。
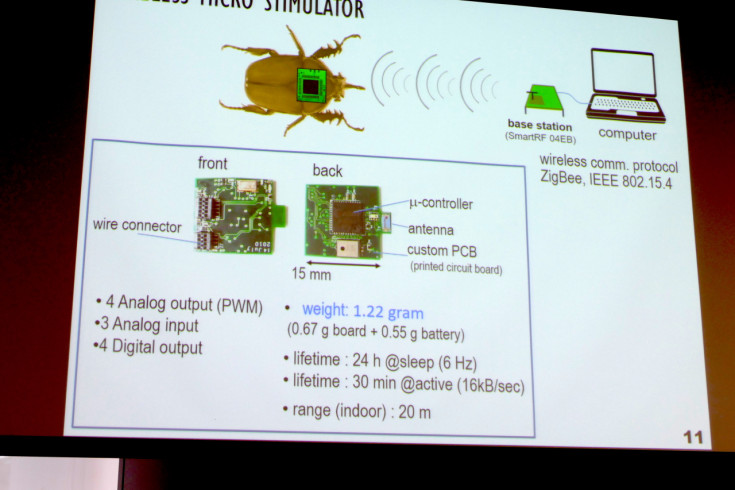
佐藤氏は実際のサイボーグ昆虫を紹介した。TI社のマイコンにZigBee、バッテリを搭載した1.3gくらいのユニットを使ったものだ。目の神経に電極を差し込んで100Hzの信号を与えると離陸する。
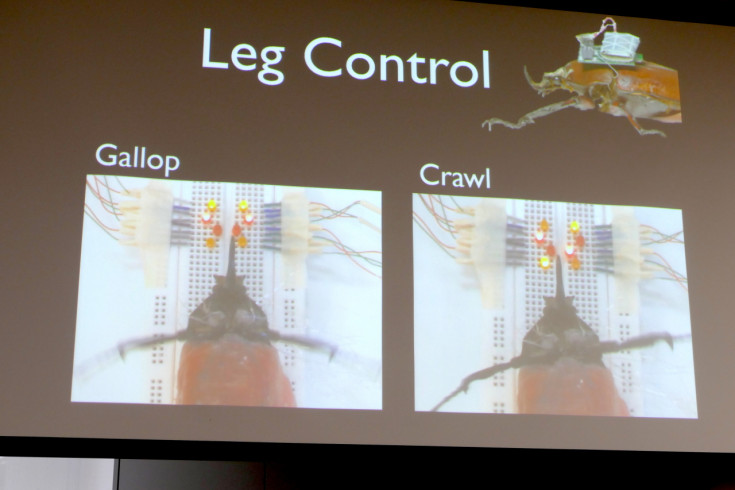
旋回は筋肉を刺激する。カナブンには左右9対の筋肉ががあるが、刺激しているのは、200年間、羽を折りたたむ筋肉だと言われていた「wing folding muscle」。だが佐藤氏は観察と破壊実験などから、この筋肉が旋回にも使われていることを確かめた。そして実際に電極で筋肉を刺激することで、左右旋回の制御性を実現することができている。
歩行制御も同じで、足に電極を打ち込むことでバタフライやクロールなど異なる動きを実現することができるという。また昆虫自身のセンサーを使って、8の字を描かせることなどもできている。今後もあくまでレスキューの支援ツールとして使うことを目指して研究しているという。
なおサイボーグ昆虫の施術時間はおよそ1時間くらい。将来は手術自体をロボットを使って自動化することも可能ではないかと考えているという。昆虫自体は埋め込まれたあとも数ヶ月は普通に暮らしているという。また、ボディエリアネットワークを昆虫に適用することで、ワイヤレス化を今後考えているとのことだ。
子供型アンドロイド「Affetto」

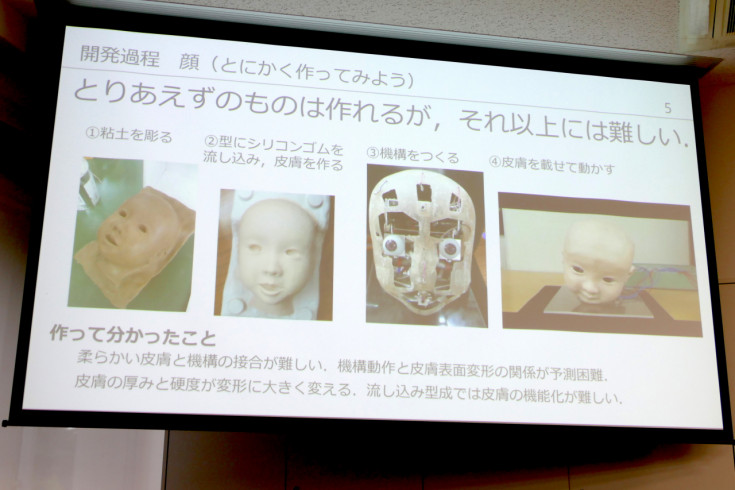
大学院工学研究科 知能・機能創成工学専攻 創発ロボティクス研究室(浅田研究室)テニュアトラック助教の石原尚氏は子供型アンドロイド「Affetto」について紹介した。
ロボットに対して人は豊かに反応を返すとは限らない。だが赤ちゃんや子供には反応する。そういった問題意識から、石原氏は人がちゃんと反応を返せるような子供型ロボットのハードウェアを実現しようと考え、研究を続けている。将来的には積極的に人と触れ合うなかで豊富な情報を得られるようにして、そのふれあいの中からロボットが育つことを目指す。

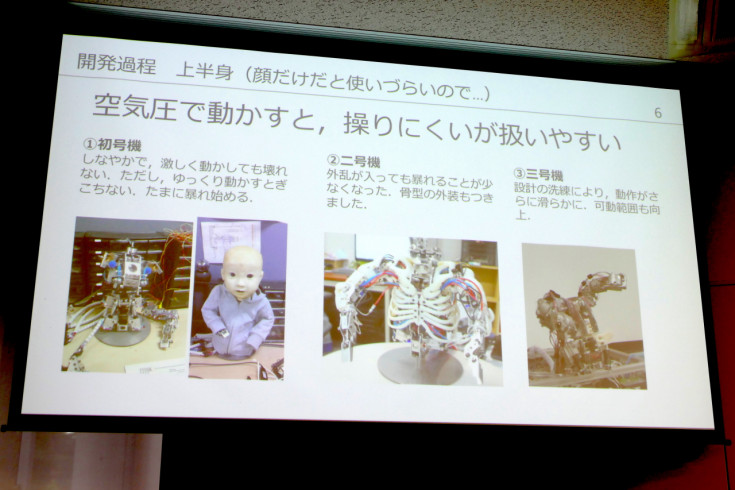
石原氏は、空気圧を使った柔らかくて機敏に動ける機構、柔軟で壊れにくいセンサーを内蔵した機能化した皮膚、そして表現などについて紹介した。「とりあえずのものは作れるが、それ以上は難しい」のが課題だという。
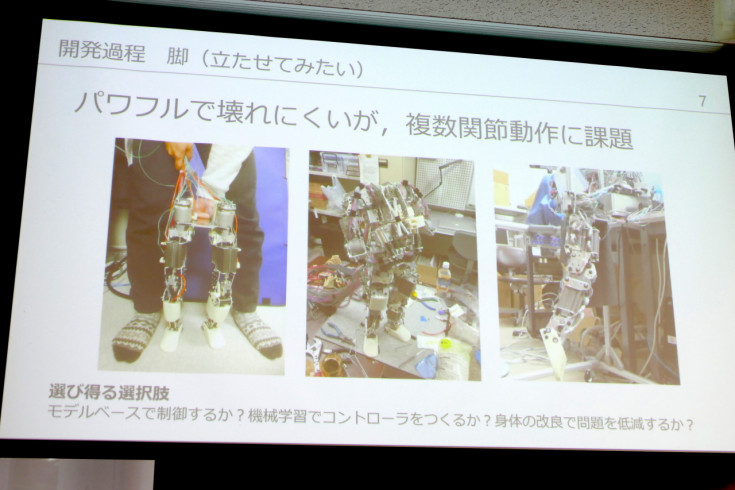
脚の制御についても、モデルベース制御か、学習で制御するようにするほうがいいのかは、まだ悩んでいると語った。
まだまだロボットと人の体はだいぶ異なる。触れ合うことで情報をどれだけ豊かにできるのか、質がどう変わるのかはわからない。難しいことが多い。「だから、まずは作ってみようということでやっている」という。
人をデジタル化して理解する「デジタルヒューマン」

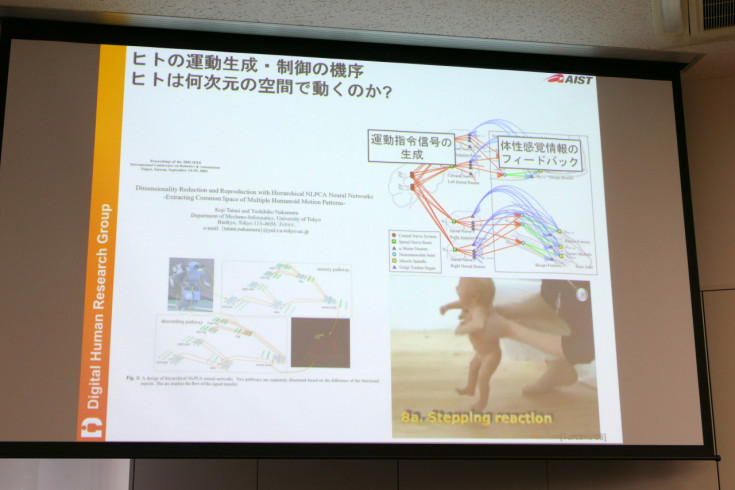
最後に、産業技術総合研究所(産総研)デジタルヒューマン研究グループの村井昭彦氏は「ヒトの作り方・測り方・動かし方」として、ヒトの筋骨格や神経系、動力学モデルを計算機内で再現して動きを生成する研究について紹介した。人には600個以上の筋肉があるが、それぞれを独立制御しているわけではない。それらがどのように連携して動くのか、どのような次元で動いているのかを探る研究だ。
最初は東大の人類学教室から骨格標本を借りてCTスキャナーで計測し、形状モデルを作成、各関節間にジョイントやパラメータを設定するところから始めたという。
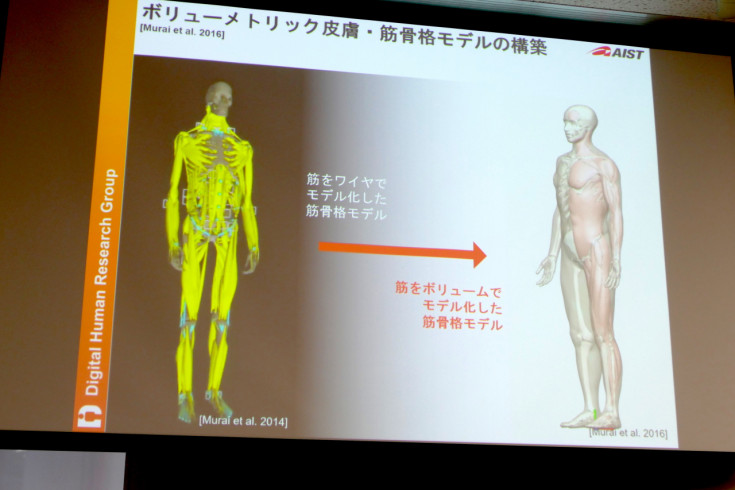
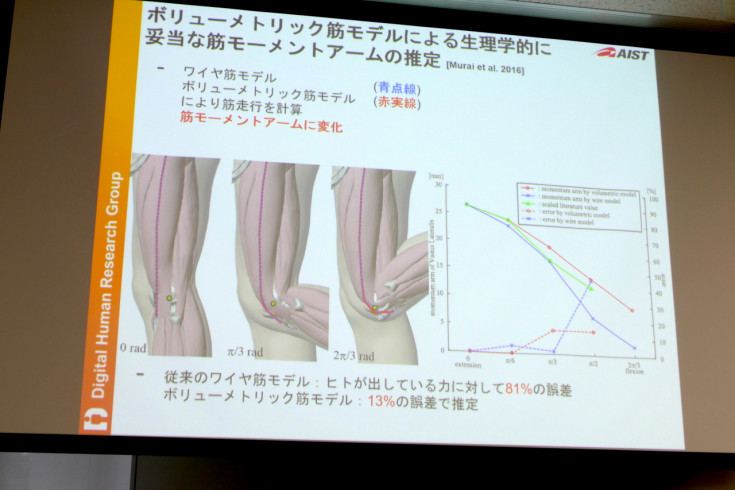
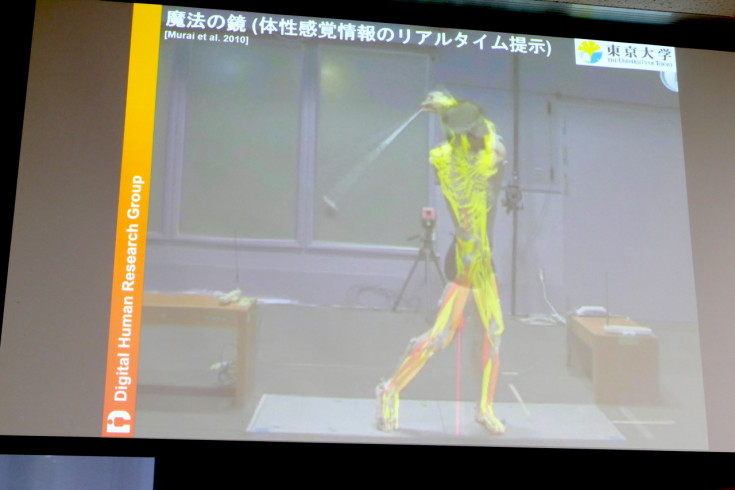
人の動きの把握にはモーションキャプチャーを用いる。位置を検出するマーカーや力を計測するフォースプレートを使って人の動きを計測し、姿勢や筋出力を再構築して再現する。だが力を計測するだけでは十分ではない。たとえば同じ関節トルクでも、筋肉自体のボリュームによる変形、そして関節と筋肉の位置関係の変化を考慮に入れると、現実に近いトルクが計算できるようになるという。これらの技術はリアルなアニメーションを生成するためにも使える。
全身が調和した運動は、どのように生まれてくるのか。面白いことに、人の歩行の運動を使ってネットワーク構造を与えたモデルに対して、膝に衝撃を与えると、実際の人と同じような膝蓋腱反射が起こるのだという。つまり膝がぴょこんと上がるのだ。
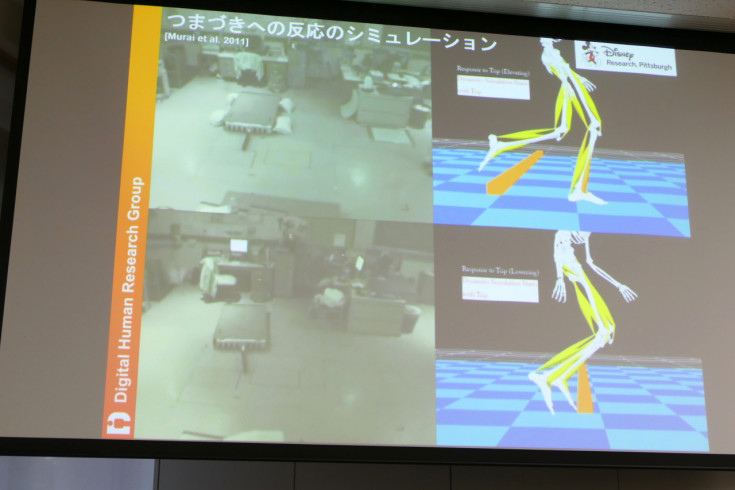
また、歩行しているときにつまずくと、つまずいたあと、運動コントローラーが切り替えられる前に反射的な活動が現れる。反射システムがコントローラの中に入れておくことで、運動パターンを新たに生成しているのではないかという。このような反射や自動的な運動と随意的な運動がどのように生成されるのかが面白いポイントだ。
このような研究を応用すると、人と何かのあいだのインタラクションを定量化したり、学習スキルにどのような影響があるかを調べることができる。そうすることで、人と製品のあいだのインタラクションをより健康、快適なものに変えていくことができる。そのためにデジタルヒューマン技術を発展させていきたいと村井氏は語った。
次回の「このロボットはすごい」は福岡、2018年2月に開催、ロボット出展を募集

次回の「このロボットはすごい(http://konorobo.main.jp/)」は、2018年2月3日、福岡市科学館で開催される予定だ。科学技術振興機構(JST)の科学コミュニケーションイベント「サイエンスアゴラサテライト in 福岡」の一部としての開催で、大阪大学の浅田稔教授が特別講演を行うほか、「越境」をテーマに異分野クロストークセッション「ロボット×???」として、Xiborg代表取締役の遠藤謙氏、三菱電機の児島諒氏、東北大学准教授の多田隈健二郎氏、karakuri products代表の松村礼央氏らがトークする。これまでどおり、ネット中継も実施する。
会場となる福岡市科学館(https://www.fukuokacity-kagakukan.jp)は福岡県福岡市中央区六本松に2017年10月にオープンする予定の新しい科学館だ。
現在、イベントにあわせて2月3日から4日の予定でロボットの展示・イベントを行う人を募集している。ロボットの運搬費は出ないが、人員については旅費が2名分まで出るとのことだ。応募多数のは場合は選考になる。出展希望者は fuk2018@konorobo.main.jp まで。



この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
森山 和道PR







このカテゴリの新着記事




注目のロボット









注目のロボット企業







連載・コラム

