


2020年に本大会が行われるWRS(ワールドロボットサミット)のサービスロボットカテゴリーの1種目として「Future Convenience Store Contest(FCSC)」が企画されている。FCSCとは、コンビニエンスストア店舗における各種業務(品出し・入替え、接客など)の自動化を対象としたロボット技術コンテストだ。ホームページの趣旨では「新たな近未来のコンビニ像」の創造を目指しているとされている。
2018年3月9日、中央大学後楽園キャンパスにて、「WRS Future Convenience Store Challengeシンポジウム」が開催された。主催は計測自動制御学会システムインテグレーション部門空間知部会。経済産業省からWRSの紹介が行われたほか、スポンサーであるセブン‐イレブン・ジャパンからの講演、2017年12月に仙台にて開催された計測自動制御学会システムインテグレーション部門講演会で行われたFCSCのトライアル大会の報告が行われた。
店舗業務の自動化チャレンジ「FCSC」

最初に経済産業省 製造産業局 産業機械課 ロボット政策室 栗原優子氏は「ロボット革命実現会議」や、2015年の「ロボット新戦略」など政府の取り組みについて改めて紹介。政府は、2015年度からの5年間を「ロボット革命集中実行期間」と位置付けて様々な取り組みを続けている。
WRSのコンセプトは「人間とロボットが共生し協働する世界の実現」。4カテゴリからなる競技会と展示会から構成され、技術開発・社会実装を加速させることを狙う。2020年には本大会、2018年10月には東京ビッグサイトでプレ大会が行われる予定だ。
「フューチャーコンビニエンス・ストア・チャレンジ(FCSC)」は、サービスカテゴリのなかの一種目。店舗業務(陳列・廃棄、接客、トイレ清掃)の自動化チャレンジを目指す。競技参加チームの一部には渡航費などのサポートもある。募集期間は3月15日まで。サポートキャラクターはドラえもん。
自動化できれば恩恵も大きいコンビニ業界

続けて、「WRS Future Convenience Store Challenge トライアル大会2017」について、首都大学東京システムデザイン学部の准教授 和田一義氏が講演した。まず和田氏はFCSCの背景や、前身である「Future Service Design Award」について触れた。背景は少子高齢化による生産年齢人口の減少がある。一方、現状のロボット技術には限界があり、人間の代替は難しい。指示された物体を棚から持ってくることさえ難しいのが実情だ。
これに対してコンテスト方式による技術開発を行おうという試みがいくつか進められている。ただ、目標設定が未来で、現状の問題解決にはつながっていない。
和田氏は大きな市場、要求が明確なユーザー、5年後程度に実用化できるレベルの課題設定、多くの人が参加でき、世界にインパクトを与えられるものということで、コンビニを舞台にしたロボコンを思いついたと語った。コンビニは店舗でやることが明確でマニュアル化されており、市場も大きい。また課題を要素に分解しやすく、ロボコンにしやすいと考えたのだという。労働集約型産業であり、自動化できれば恩恵も大きい。
技術ができるだけではなく、技術が生まれることで、新たなサービスやコンビニのデザインが生まれるのではないかと考えているところがこれまでのロボコンとは違うところだと語り、デザインコンテストの取り組みも紹介した。ロボット技術導入を前提とした店舗のデザインが生まれることを期待していたが、そこまでドラスティックなものは出てこなかったようだ。
トライアルとして2017年に仙台で行われた「WRS FCSC 2017」では、陳列・廃棄や接客、トイレ清掃の技術競技を行った。他のロボコンと違った特徴は、会場側に独自インフラを仕込むことができるところだ。
コンビニの現状と課題、ロボットへの期待は「無人化ではなく省力化」

次に、株式会社 セブン-イレブン・ジャパン オペレーション本部 イノベーション開発部 副総括マネージャーの田尻雅幸氏が「コンビニにおける課題,ロボット技術に期待すること」と題して、コンビニの現状と課題を紹介し、セブン-イレブンの歴史や理念を解説した。
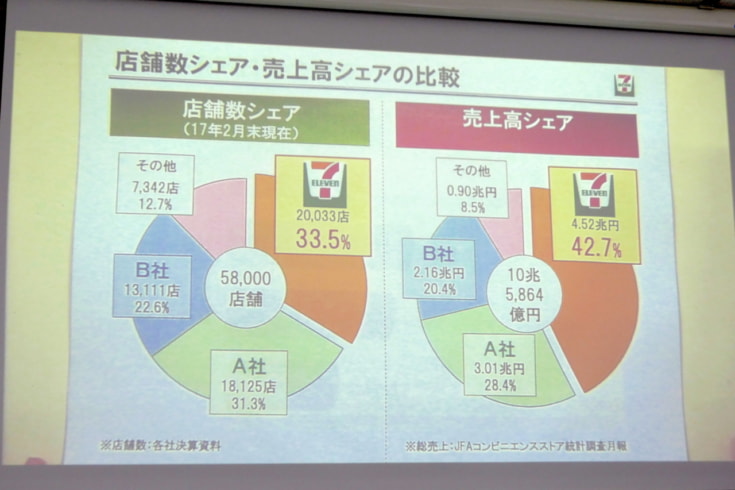
現在、セブン-イレブンは世界17カ国で計64,244店の店舗がある。日本にはそのうち2万店がある。店舗あたりの1日平均来客数は1,054人。年間総来店客数は、のべ約77億人。店舗数シェアは33.5%。売上高シェアは42.7%。つまり1店舗あたりの売上高が他チェーンよりも高い。田尻氏は「ただ無人化・省力化だけではこの差は出ない」と強調した。
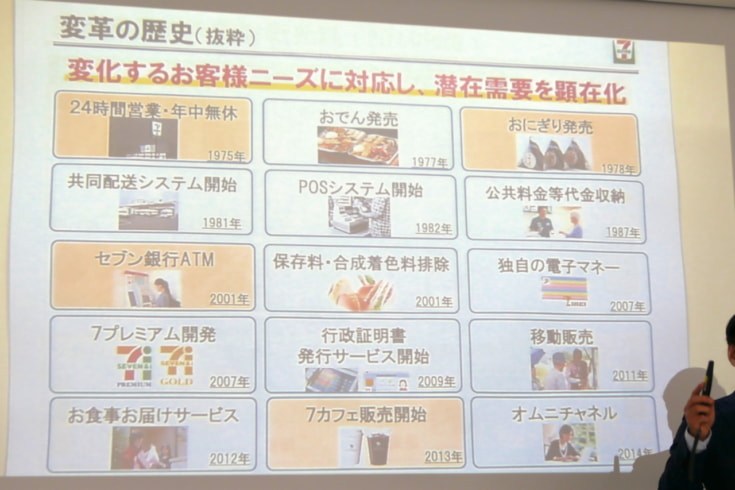
セブン-イレブン ジャパンが創業されたのは1970年代。大型店が進出し始め、一方それまでの中小規模の小売店は低迷し始めていた。商品調達力が低く、資金不足、情報不足といった課題があったと述べた。そんな状況のなか、フランチャイズ経営が始まった。本部が店舗経営をバックアップし、加盟店は商品と人、経営数値のマネジメントを行う。セブン-イレブンでは週に150点の新商品が出るという。その中から売れるものだけが残り、売れないものは消えていく。
24時間営業・年中無休を始めたのは1975年。最初は福島県の店舗で始めたという。おでん発売が始まったのは1977年、おにぎり発売が始まったのは1978年。1982年にはPOSシステムが導入された。これで何がいつどのくらい売れるかという仮説立案ができるようになった。たとえば、2016年度、おにぎりは年間21億個、弁当は5.8億個売れている。
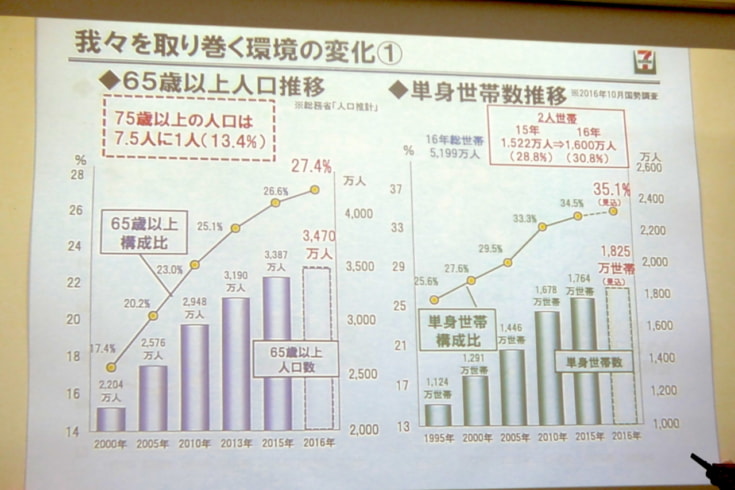
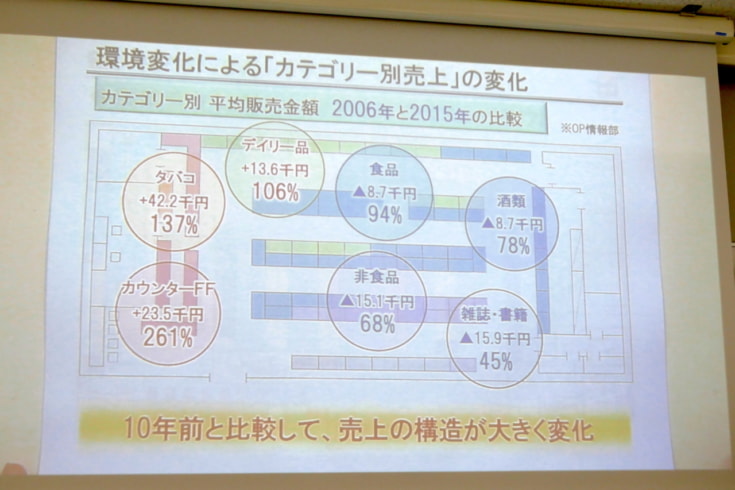
いま日本はどんどん高齢化しており、単身世帯数も増えている。20-64歳女性の7割は何らかの仕事をしている。そのぶん食の外部化(外食+中食)も進んでいる。セブン-イレブンの使われ方も変化しており、女性比率が増え、50歳以上来店比率も上昇している。
コンビニは昔は若者が使う店だったが、今はもう客層が変化している。そのため、品揃えもこの10年で大きく変化している。パウチ惣菜などが増えた。昔はスーパーで買っていたものもコンビニで買う動きが増えている。当然、売り上げ構成も店舗内のレイアウトも変わっている。
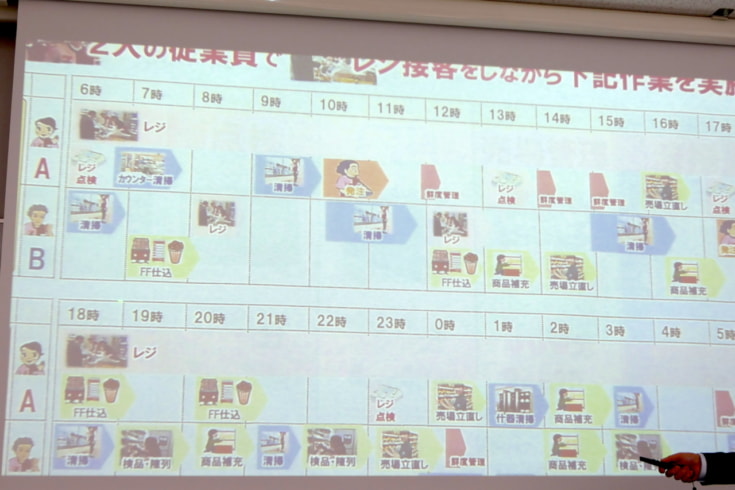
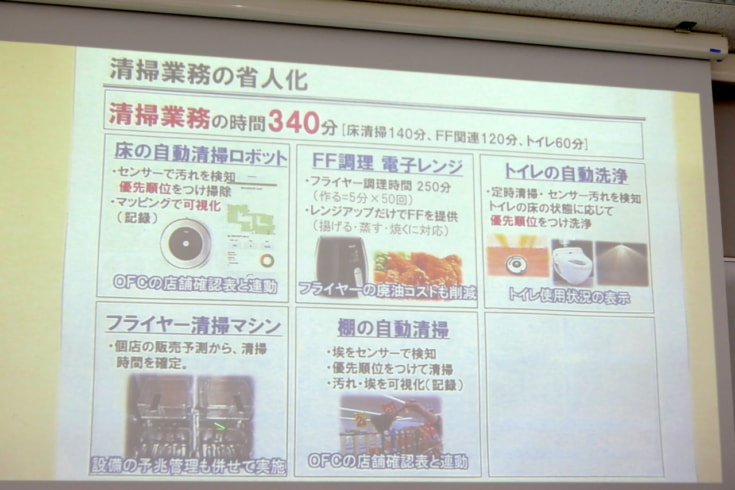
いまセブン-イレブンの従業員人数は40万人。1店舗あたり20人が在籍している。人材は多様化・高齢化している。田尻氏は「無人化ではなく省力化したい」と再び強調し、従業員が1日のあいだにどんな仕事をしているのかを紹介した。朝ピーク、お昼ピーク、それぞれに対応・準備し、清掃を行い、夕方ピーク前に備えて商品を補充し、空いてる時間には全2,500アイテムの発注を随時行う。節目節目にはレジ点検をして銀行に送金するといったサイクルだ。
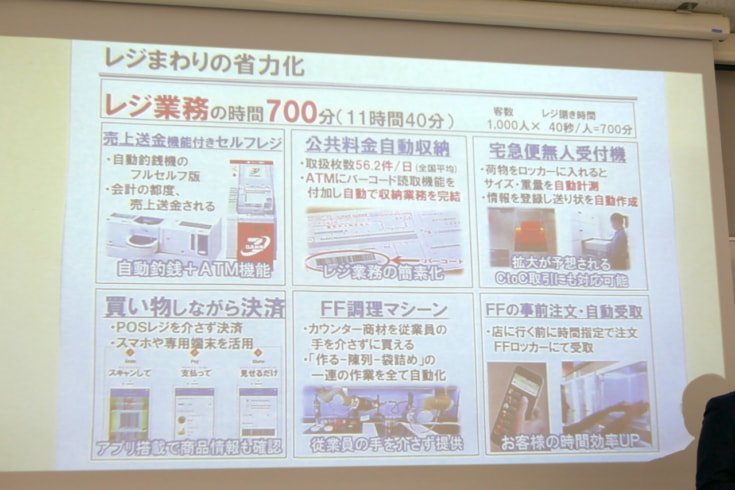
セブン-イレブン・ジャパンでは、レジまわりの省力化に向けて、売り上げ送金機能付きのセルフレジ、公共料金自動収納、宅急便の無人受付、スマホを使った買い物しながらの決済、中華まんや揚げ物などの自動調理マシン、事前注文・自動受取などの声があがっていると紹介した。
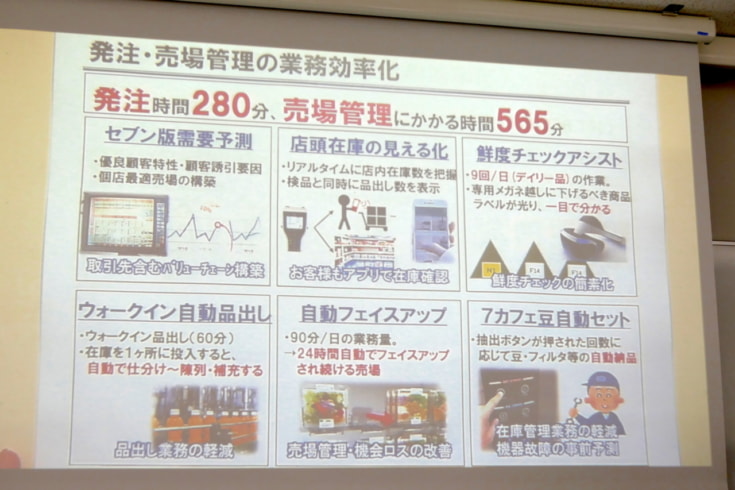
発注作業・売場管理の業務効率化も期待されている。需要予測、店頭在庫の見える化、鮮度チェックアシスト、ウォークイン自動品出し、自動フェイスアップなどが挙げられている。
田尻氏はロボットへの期待として「完全自動化ではなく、作業の省力化によって、接客の質向上をしたい」と強調した。売場を作るためのサポートを行い、人は接客改善で売り上げを伸ばす。そして食洗機導入のような省力化効果によって空いた時間を使うことで欠品を改善したり接客改善によって売上をあげたいと考えているという。田尻氏は「コンビニを大きな自動販売機にしたいわけではない」と述べ、単なる自動販売機では客はすぐに飽きてしまい、売り上げはやがて下がる。だから接客と商品の質向上を狙いたいと考えていると述べた。

なおコンビニに導入されている機械のうち、もっとも高価なものは、レジの「ストアコンピュータ」だという。高級車両くらいの値段だそうだ。カネさえかければ技術でできるからといって、ビジネスになるとは限らない。田尻氏は「どんなすごい技術でもビジネスにならないものは無用の長物になってしまう。どこまでお金をかけるべきか、採算性が合うかどうかを考えなければならない」と強調して締めくくった。
トライアル大会での東大JSKチームの戦略

このあと、2017年12月に行われたトライアル大会での「セブン-イレブン賞」贈賞式が行われた。セブン-イレブン賞受賞者は東大JSKによるCチーム。理由は「一番商品に対して愛情を感じられるチームだった」こととされた。
贈賞式に続いて、東大JSK Cチームの矢口裕明氏からの「ロボット、競技会、社会問題」と題された講演が行われた。東大JSKはロボット系で最も有名な研究室の一つ。教員7名、学生数も55名と規模も大きい。矢口氏は近年は目標設定が明確な競技会に注力しており、積み重ねの重要さを実感しているという。矢口氏は、DARPAロボティクスチャレンジや、九工大で行われているトマトロボコン、アマゾンピッキングチャレンジ(APC)他、展示会などでの様子を動画で紹介した。

3年間ずっとTHKのロボット「SEED-Noid(http://seed-solutions.net/?q=node/1)」を使って改良を続けており、用途に応じた部品換装が簡単に行える点が特徴だと述べた。モーターとモータードライバー、そこに指令を送るコントローラーを一体化したスマートアクチュエータ間をデイジーチェーン接続したシステムになっているため、簡単に手先だけを交換するといったことが可能になる。上半身と下半身は電源も含めて別系統のロボットになっている。また、各関節に安全機構があり、ロボット自体が初心者が動かしても壊れにくいロボットとなっている。
APC以降、モノをAからBへ移動させるピック&プレースに力を注いでいるという。倉庫や家庭ではそれぞれものの扱い方が違うが、共通点をあぶり出して抽象化に取り組んでいると述べた。何がどこにどのようにあるのか、どこに移動させるのか、その物体を掴むときにはどのように扱わなければならないのか。それぞれの問題に取り組むことで、陳列廃棄などのタスクが行える。
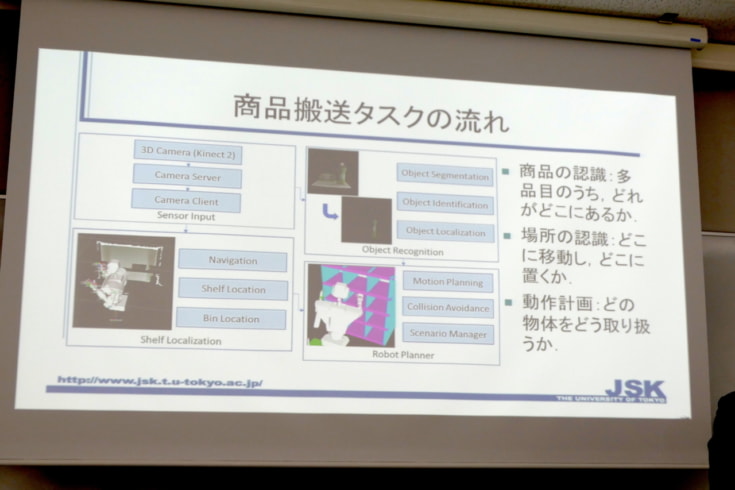
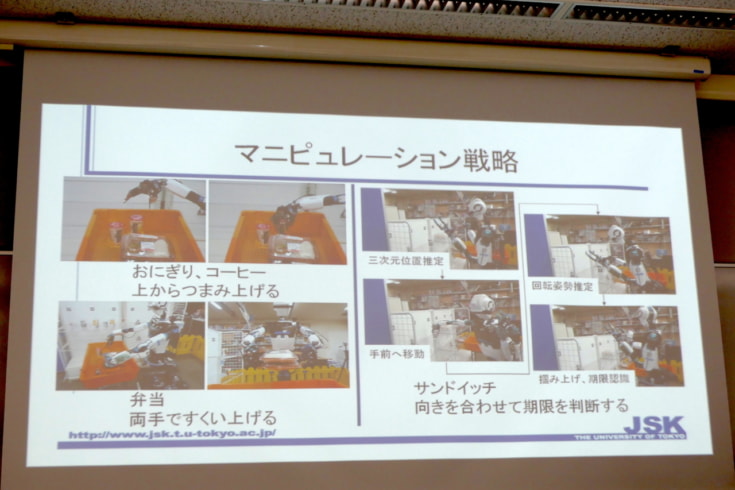
FCSCでは、ディープラーニングベースのSSD(Single Shot Multibox Detector)によって物品認識を行い、特徴点マッチングで回転姿勢を認識させたりしていた。マニピュレーション戦略については、おにぎりやコーヒーは上から掴めばいいが、弁当は両手で掴ませたり、サンドイッチは消費期限がわかるまで手のなかで回転させて掴ませた。
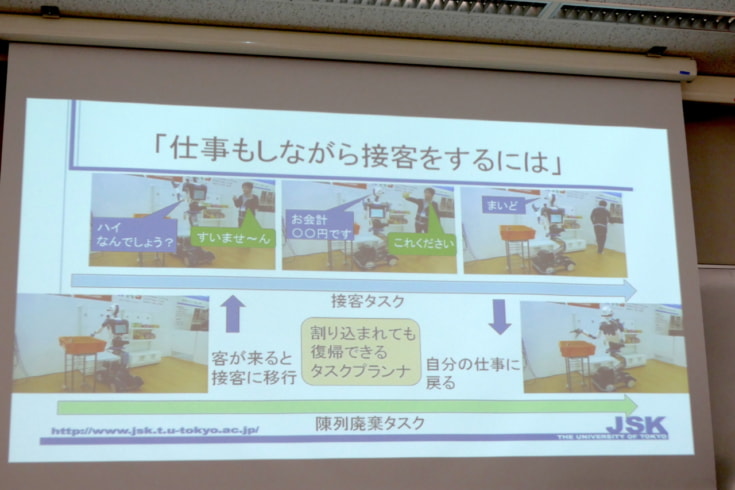
また、陳列廃棄作業中に接客作業を割り込ませることもできる。呼びかけられたときに、自分の腕が何かを持っているのかどうかを把握させて、きれいに中断させて、また復帰させるタスクプラン二ングを行わせた。要素は4つ。割り込みハンドリング、エラー対応のために人を呼ぶエラーハンドリング、ちょうどいいところまでタスクを進めてから中断・再開するリバックハンドリング、エンティティハンドリングだ。ロボットはまず話しかけられたことを理解できなければならない。自分に興味を持っている人間が誰なのか、その上で自分の作業を中断するべきか、続けるべきなのかを検討する必要がある。
矢口氏はロボット競技会は「社会問題の縮図」だと述べた。DRCは福島第一原発事故を受けて生まれたロボコンだし、トマトロボット競技会は農業の諸問題、APCは流通における問題を背景としている。ではFuture Convenience Store Challengeはどのような社会問題を背景としているのか。
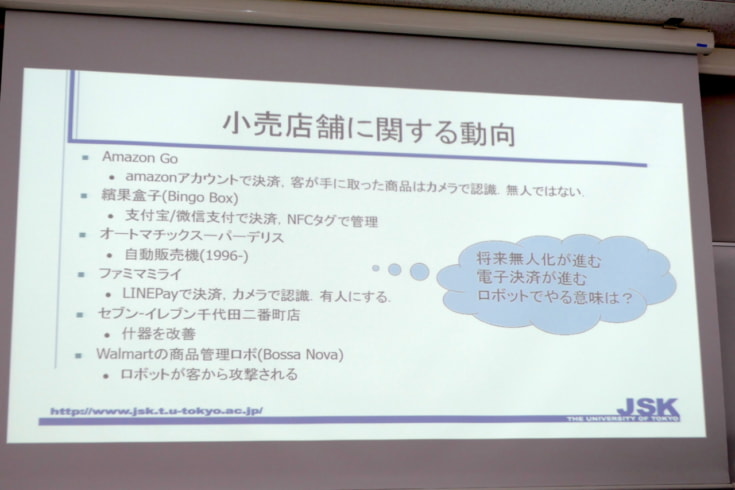
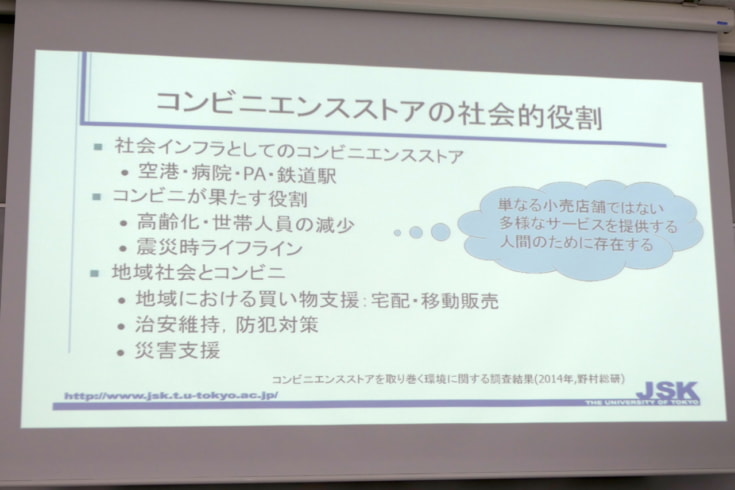
矢口氏はAmazon Go、BingoBox、オートマチックスーパーデリス、ファミマミライ、什器を改良しているセブンイレブン千代田二番町店、ウォルマートの商品管理ロボット導入などを背景として紹介した。「コンビニは単なる小売店舗だけではなく、多様なサービスを提供する社会インフラとなりつつある」と指摘し、「小売店舗だから単純にこうすればいいというわけではないだろう」と語った。「それぞれの問題共有の場になることを願っている。参加者だけが見せられる未来があると思う」と、アラン・ケイの有名な言葉 “The best way to predict the future is to invent it.(未来を予測する最善の方法は、それを発明することだ)” を引用して講演を締めくくった。
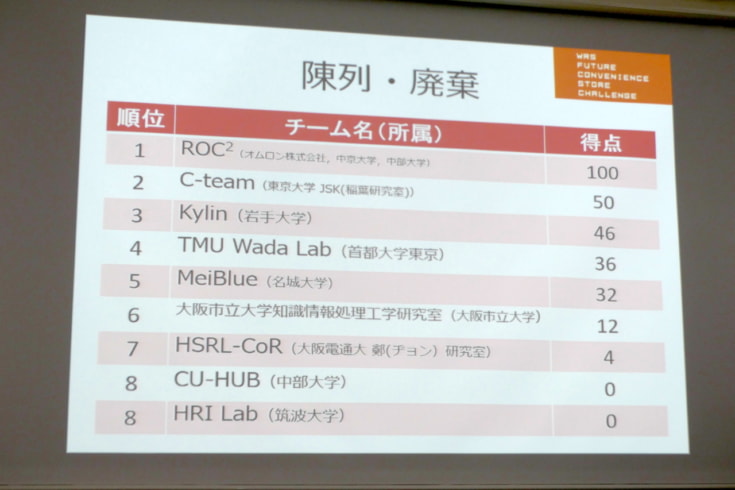
トライアル大会の各参加チームのプレゼン

午後は、2017年末に行われたトライアル大会の各参加チームからプレゼンテーションが行われた。「MeiBlue」の名城大学理工学部 准教授の大原賢一氏は、FCSCへのモチベーションとして小売店での軽作業実現のためのプラットフォーム構築を目指していきたいと考えて取り組んでいる。ロボットはTHKの「SEED-Noid」、システムは「RTミドルウェア」を用いている。各作業のなかから共通要素を見出し、そこを磨くことで様々な作業ができるようにシステムを開発しており、モデルから実装へと落とし込んでいる。大原氏は「モデリングから実装という手順を取る場合は、ROSよりもRTミドルウェアのほうが使い易い」とコメントした。物体認識にはOpenCVベースのARマーカーであるArUcoマーカを用いた。とにかくモジュール化し、入れ替えができたり、他にも応用できるように意識して開発しているという。今後も経験を積んでいき、基本的な部分は定期的にGithubに公開し、プラットフォームロボットとしての完成度を高めていきたいと述べた。

「HRI Lab」チームの筑波大学システム情報工学研究科 教授の中内靖氏は、7名のチームで取り組んだが「全然動かなかった」と振り返った。中内氏らのチームでは移動台車+腕のモバイル・マニュピュレター方式ではなく、唯一、棚をロボット化する方法を選んだ。棚の裏側にXYステージを設置した自動陳列棚だ。コンテナにある商品を認識して、マニピュレータでピックアップして棚板に載せる予定だったが、諸問題があり、動かなかったという。将来的にはより一般的な状況に対応できることを目指し、再チャレンジする。

「TMU Wada Lab」の説明は首都大学東京システムデザイン学部准教授の和田一義氏が行った。B4二人、M1一人の学生が主に開発し、トイレ清掃と陳列・廃棄にチャレンジした。トイレ清掃ロボットは、壁の中に入っていたロボットが掃除のときに出てきて、終わったらまた壁のなかに戻るというものにした。実際に考案したのは2リンクのアームロボットで、尿はねが多い領域を床清掃シートで掃除するというもの。競技会では動かなかったが、その後学生が頑張り、動くようになったとのことで動画が紹介された。擬似尿を使った床掃除の評価システムも作り、その結果、94%くらい取れていると出たが、実際には薄く伸ばしているだけで、なかなか清掃は難しいと語った。陳列には陳列と棚ロボットの二種類のロボットを使い、作業の単純化を目指した。商品把持用のハンドを作り、XYステージで商品を持ち上げ、棚ロボットが棚を自らせり出して商品を受ける。これまた競技会場ではうまく動かなかったがその後学生が頑張って動くようにしたとのこと。今後はセンサーを組んで商品を認識させる。

チーム「H3(エイチキューブ)」は Human Robot Analysis 株式会社 取締役 CTOの村上奨氏が解説した。FCSCではトイレ清掃にチャレンジした。相撲ロボット用のベースロボットを使った小型の移動ロボットで床を清掃し、同僚が捨てる予定だった掃除器を転用して作った「アクティブゴミ箱」で吸引させた。カメラとマーカを使ったロボット位置・角度のセンシングにはChainerを利用。OpenCVの機能を利用して大量の学習データを作成して学習させた。走行制御には未来の応答を予測しながら最適化を行うModel Predict Control(MPC)という手法を用いた。ロボットの目標の移動量・回転量をパラメータとして最適化問題として解いた。センシングに時間がかかっても制御系が破綻せず、通信遅延が非常に大きかった競技会本番でもうまく動き、賞金も得た。今後について実験環境の解放や技術共有、共通プラットフォームの必要性などを訴えた。ビジネス展開も考えていきたいという。
満点を取ったチームは「本気」だった

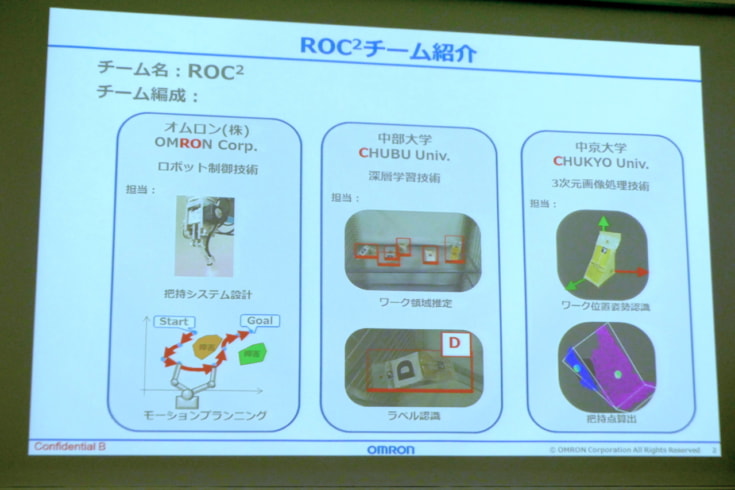
最後に、ロバストなピック&プレースシステムを作り、「陳列・廃棄」で満点を取った「ROC2」チームについて、オムロン株式会社 技術・知財本部 知能システム研究開発センタ AI制御研究室 青木豪氏が紹介した。「ROC2」チームは、オムロン、中部大学、中京大学がそれぞれ技術を持ち寄っている。
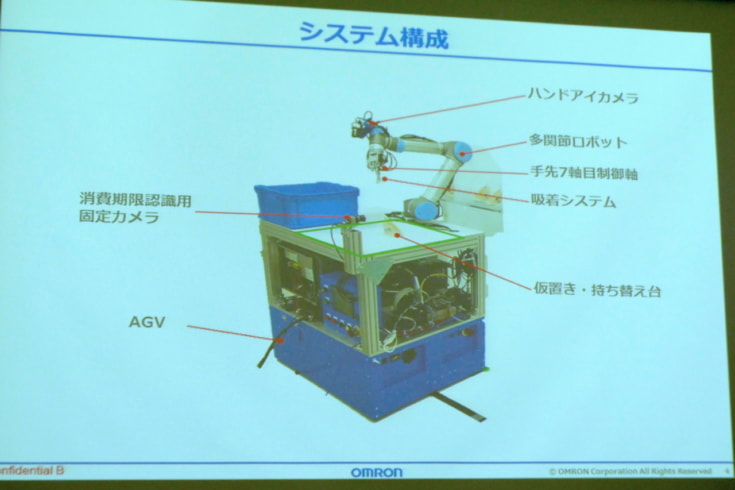
ロボットにはハンドアイカメラと6軸アームに加え、手先にも7軸目をつけた。エンドエフェクタは吸着。仮置き用、持ち換え用の台も備えており、消費期限は、専用のカメラで認識するしくみ。
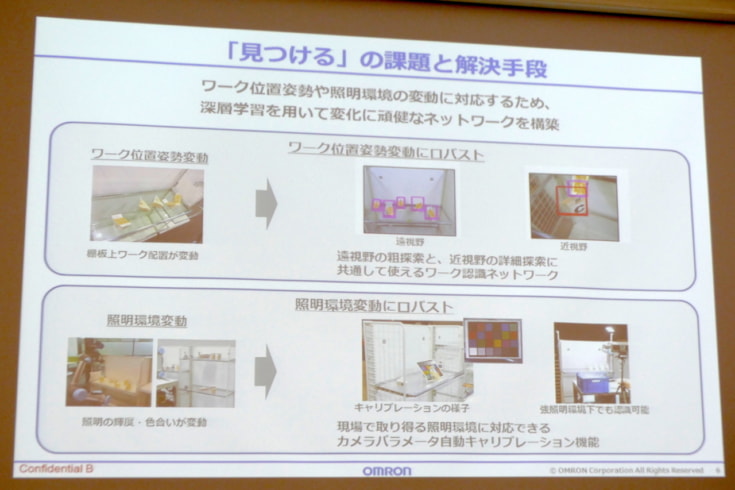
本番と準備環境の違いに苦しんだチームが多かったそうだが、「ROC2」チームでは最初から「最重要は、変動要因に対するロバスト性の確保だ」と考え、照明やワーク配置、相対位置関係、ワーク自体の変形、吸着負荷などの変動要因を事前に整理して検討した。

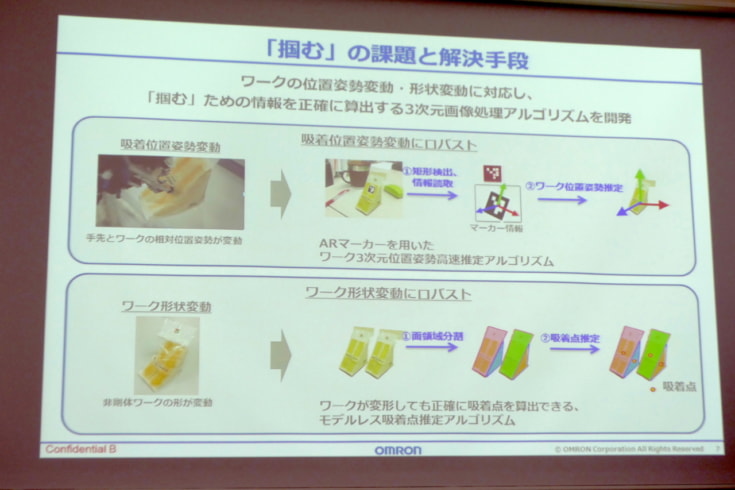
各問題に対してロバスト性を向上させるためにワーク位置姿勢にロバストな認識ネットワーク、白飛びしてしまうような照明環境下でも認識できる技術、相対的な吸着位置姿勢を吸収するためのアルゴリズムや、ワークが変形しても正確に吸着点を算出できるモデルレス吸着点推定アルゴリズムなどを開発した。
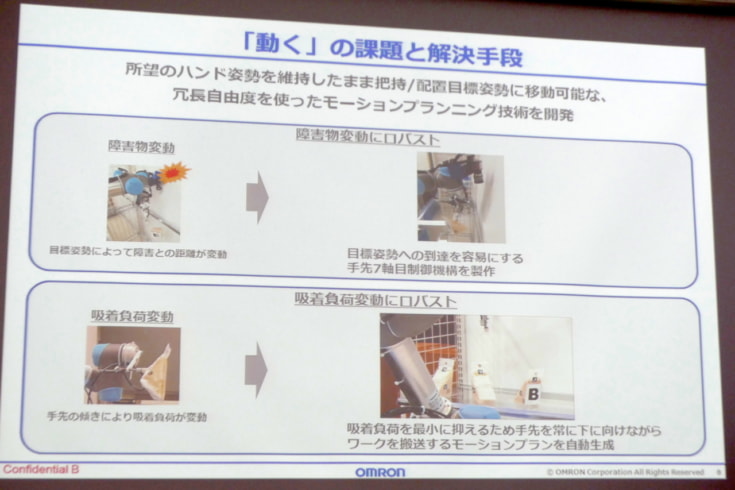
オムロンがもっとも力を注いだのは吸着負荷が変動してもワークを安定して扱える経路計画技術。ロボットがワークを振り回して落下させてしまったりすることがにないように、負荷を最小にするために、手先を常に下に向けながらワークを搬送するモーションプランを自動生成させた。
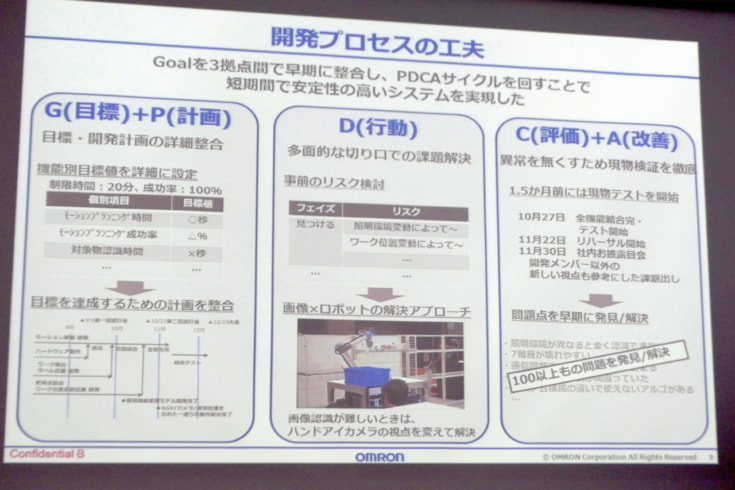
3チーム合同チームなので、目標や機能を詳細に落とし込み、そのなかで目標を設定することで、3拠点で足並みを揃えることができたと紹介。複数の技術をまたいだ課題解決においては大事なことだ。1ヶ月前にリハーサルを行い、1日最低一回は行えるようにスケジュールも組み、1.5ヶ月前には現物テストを開始。社内のお披露目などを通して、「事前に100以上の課題を発見することができた」と述べ、青木氏は「本気でやってきたんだということを示したい」と語った。
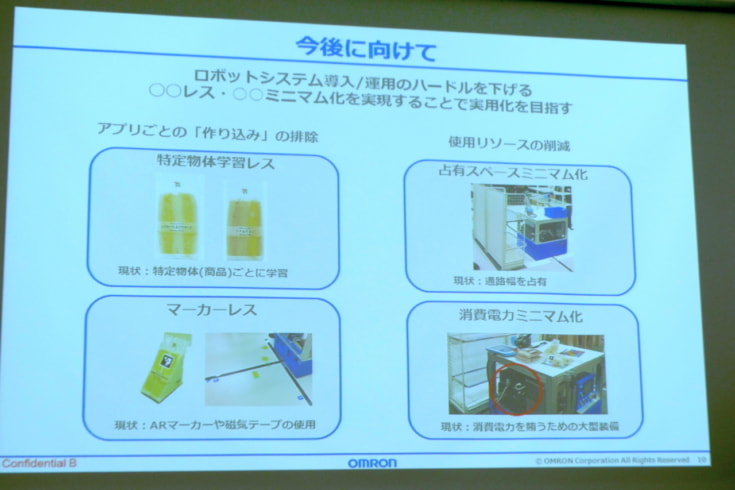
今後は、ロボットシステムの導入/運用のハードルを下げるために、アプリごとの特定物体学習レスやマーカーレスなど作り込みの排除、占有スペース・消費電力など使用リソースのミニマム化を目指す。たとえば現状では、たまごサンドとツナサンドは別々の学習が必要なので、それらを排除してより簡単に現場に導入できるものにしたいという。
「WRS FCSC 2018」は、10月17日〜21日に開催

最後に、FCSCの技術部門長である産業技術総合研究所ロボットイノベーション研究センター ロボットソフトウェア研究チーム チーム長の安藤慶昭氏らから、今年の「WRS FCSC 2018」の規定の説明と、意見交換が行われた。
10月17日〜21日まで東京ビッグサイトで開催される「Japan Robot Week」のなかで、東6、7、8ホールで行われる。賞金は1位300万円、2位が100万円、3位が30万円。競技は2017と基本的に同じで、陳列・廃棄、接客、清掃の3競技。接客を最大限にするために、それ以外の部分を省力化することを目指す。
1チームの持ち時間は20分。インフラ設置にかけるリフォームタイム、セッティングタイム、デモンストレーションの3つを、各チームが自由に時間配分して競技を行う。大きな変更点は商品の種類が増えること。これによって商品認識や把持戦略がより複雑になる。陳列も、決められた棚の決められた場所に置くことが求められるようになる。棚仕様も変わる。
そのほか競技にも変更点がある。たとえばトイレ清掃においては、トイレの便器ごと交換してしまうことも可となった。詳細は、ホームページ(http://www.f-csc.org)をご覧いただきたい。




この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
森山 和道PR







このカテゴリの新着記事




注目のロボット









注目のロボット企業







連載・コラム

