


米国科学振興協会/AAASが発行する「Science」誌が、2018年3月12日から14日の3日間の日程で、東京・台場のプラザ平成で「Science Robotics Meeting in Japan 2018」を開催した。AI、IoTならびにCPS (Cyber Physical System)、HRI(Human Robotics Interactive)の3技術カテゴリーからサービスロボットや製造用ロボットに関する様々な研究発表が行われた。
3日目にはセイコーエプソン株式会社 ロボティクスソリューションズ事業部 RS企画設計部宮澤比呂之氏が「エプソンの目指すロボティクスイノベーションと自律型双腕ロボット”WorkSense”」と題して講演した。レポートする。

エプソンの「省・小・精」と統合化技術
セイコーエプソン株式会社のロボット関連売り上げは169億円。同社は長期ビジョン「Epson25」を掲げ、「省・小・精の価値」で、人やものと情報がつながる新しい時代を創造すると掲げて事業に取り組んでいる。国際ロボット展に出展された双腕ロボット「WorkSense」もこの一つだ。
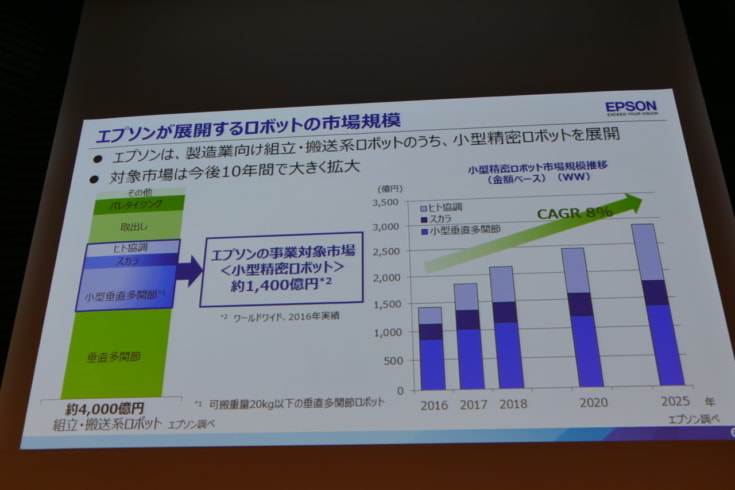
製造業における組み立て・搬送ロボットのうち可搬重量20kg以下の垂直多関節ロボットを小型精密ロボットと呼ぶ。この領域には1,400億円くらいの市場規模があり、今後、年平均8%くらいのペースで上がっていくと考えられている。エプソンはここを事業対象領域としている。
製造現場は、いま、曲がり角にある。背景には新興国の所得水準向上、先進国の少子高齢化、製品の高度化・複雑化、自動化エンジニアの不足などがある。そして人の手では実現できない精度のものづくりが求められるケースが増えている。
エプソンのロボットのルーツは腕時計の組み立て工程にある。自社でのロボット開発・販売は1983年から。以後、スカラ型を中心に販売台数を伸ばしてきた。近年は独自構造の小型垂直多関節ロボットも展開している。
エプソンは、エネルギーを省く、ものを小さくする、精度を高くする「省・小・精」の技術と、力覚センサなどのセンシング、画像処理、統合ソフトウェア技術などを持っている。また、ロボット単体だけではなく、周辺機器のパッケージ化によるソリューション提供による、生産技術、ものづくりの高度化技術を持っている。ワールドワイドな製造販売ネットワークも同社の強みだ。
自律型双腕ロボット「WorkSense」
自律型双腕ロボット「WorkSense(http://www.epson.jp/osirase/2017/171122.htm)」は、エプソンのロボット技術の集大成として、スタンドアローンで人が行う作業の自動化を目指している。
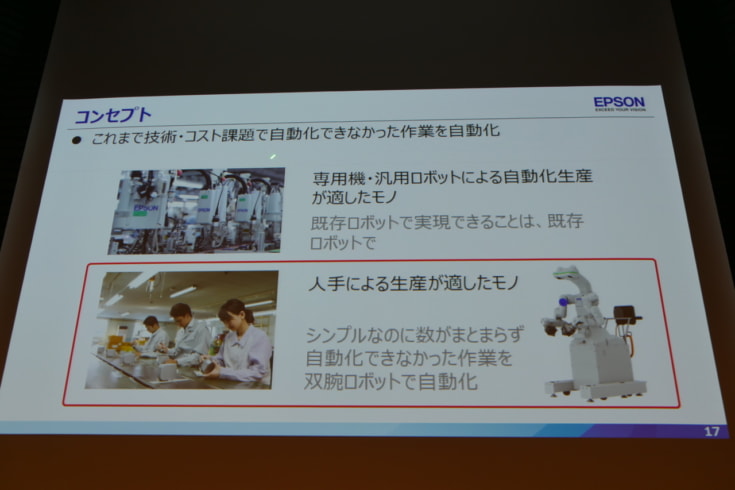
自動化ニーズは各所にある。だが経済合理性の問題から、生産性が高い部分から自動化は進められている。品質よく、人よりも早く生産できるものでなければ自動化できない。カスタム設計のラインを作ると、ロボット単体以上に、そのコストのほうが上回ってしまう。このような事情から、なかなか自動化が進まないのが現状だ。たとえば、ロボットハンドにしても用途に応じて作り込むのが普通だ。
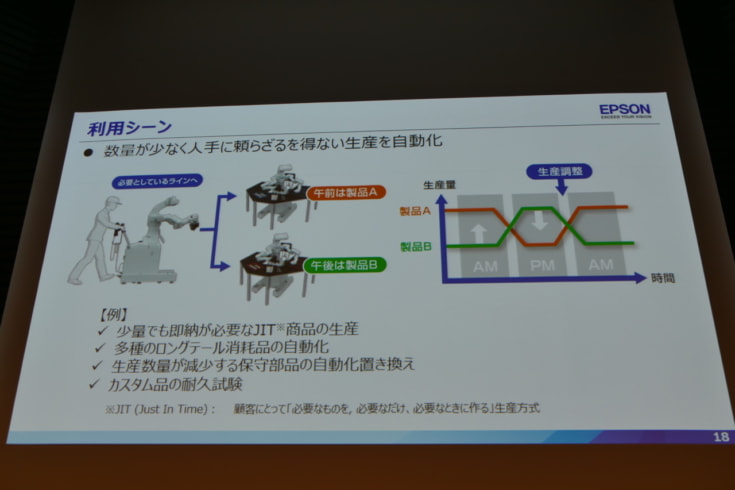
エプソンでは、いま人手で行われている作業を、双腕ロボットを使って自動化することを目指している。対象はスピードを求めない多品種少量生産用途だ。たとえば、ロボット単体で生産現場に持っていき、遅くても、簡単でもいいので、午前と午後で異なる作業をやらせる。
具体的な作業としては、少量でも即納が必要なジャストインタイム商品の生産、多種のロングテール消耗品の自動化、生産数量が減少する保守部品の自動化置き換え、カスタム品の耐久試験などを考えているという。
普通の産業用ロボットはアンカーボルトで床に固定されるが、WorkSenceはキャスターを使って移動可能だ。ハンドは専用品ではなく標準装備。I/Oを使った機械間のやりとりは基本的にしない。複数台を使ってもらうことを想定している。
こういったロボットをプラットフォームとして、まずは使いはじめ、良い例を収集してライブラリ化していこうとしているという。宮澤氏は「なんとか育てていく」という発想でやっていけないかと語った。
「WorkSense」の技術
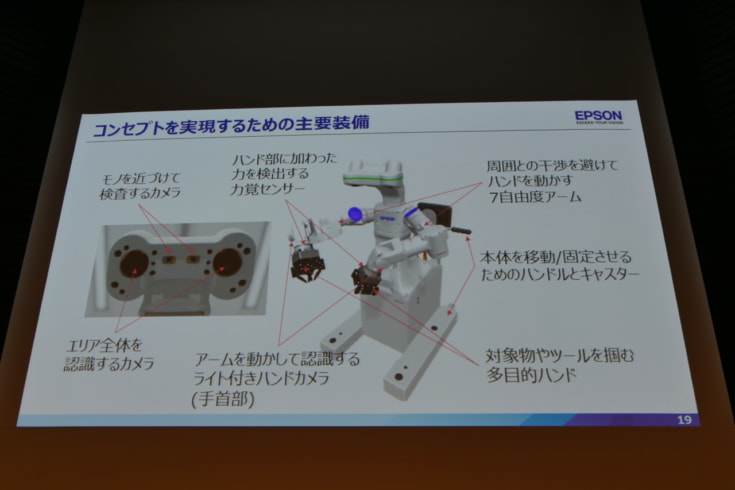
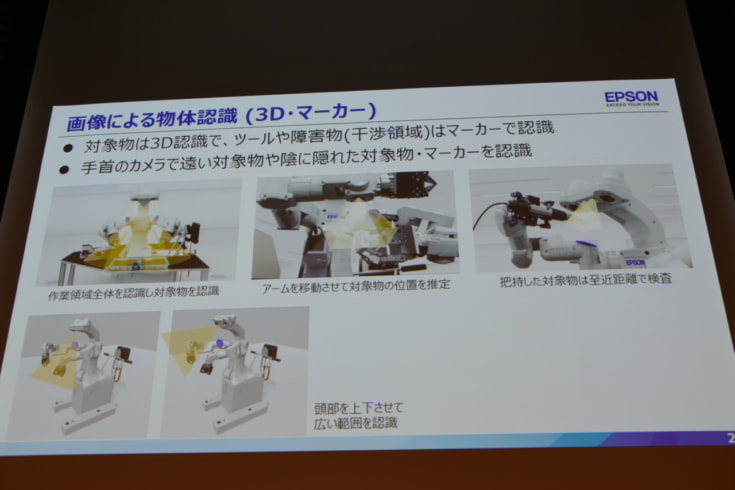
こういったコンセプトを実現するために、「WorkSense」は画像による3次元物体認識を行うことができる。頭部のステレオカメラと、手首のカメラで対象物やマーカー、あるいは障害物を認識する。ワークにはマーカーは貼れない。だが治具やツールにはマークを貼って併用するような使い方を想定している。
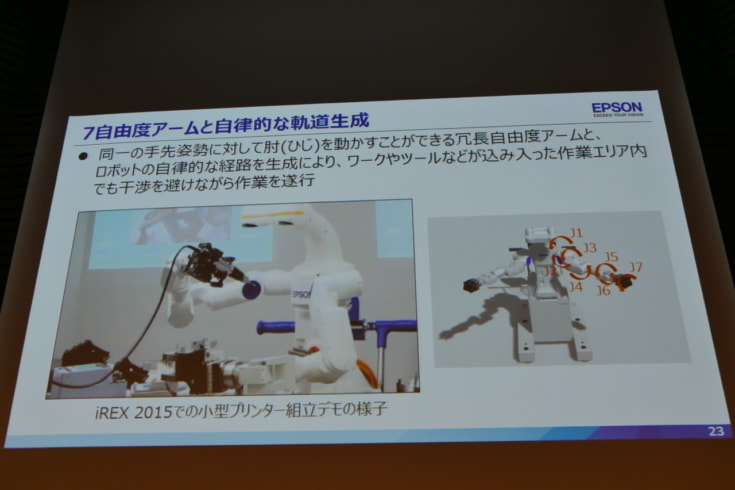
腕は片腕7自由度。7自由度あるため、冗長自由度を用いることで同一手先姿勢に対して肘を動かすことができ、狭い作業エリア内でも干渉を避けた軌道を生成できる。軌道はロボットが自律生成する。また腰軸も使うことで、手をより遠くまで届かせることができる。
双腕を使った協調動作も可能だ。これによって、反転などのために仮置き台のような周辺装置を使う必要がない。手首には水晶圧電素子を使った力覚センサを搭載。インピーダンス制御によって、ならい動作をしながら、物体をはめ込むような作業ができる。
標準装備の4つの爪をもった多目的ハンドは、挟む、つかむ、つまむ、握る、押すといった様々な把持操作ができる。実際に同社のプリンターを分解して、「8割は持てる」ことを確認したという。また、吸着やハサミなどのハンドツールを使うこともできる。
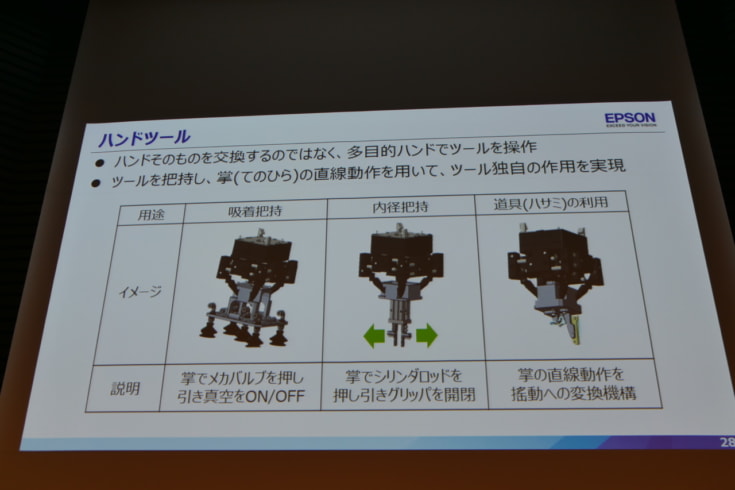
あくまで、ハンドを交換するのではなく、ハンドでツールを把持して操作することを想定している。宮澤氏は、今後現場に導入されることで、知見が蓄積され、使い方が決まってくることを期待していると述べた。
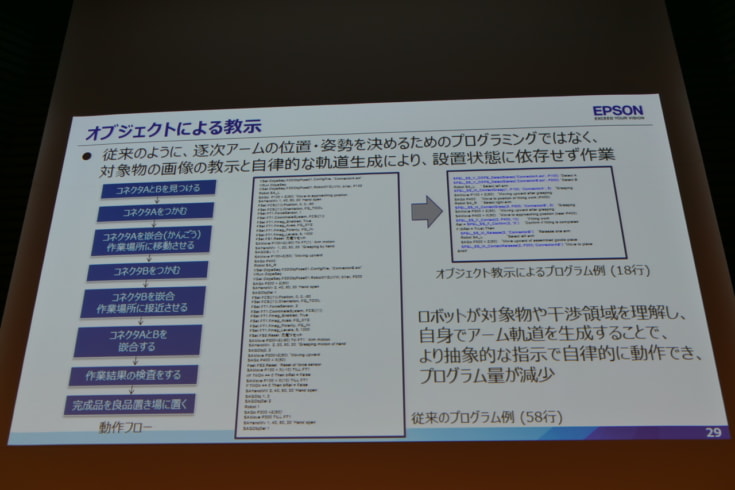
プログラミングは逐次位置姿勢の処理ではなく、より抽象化したかたちで与えることができる。
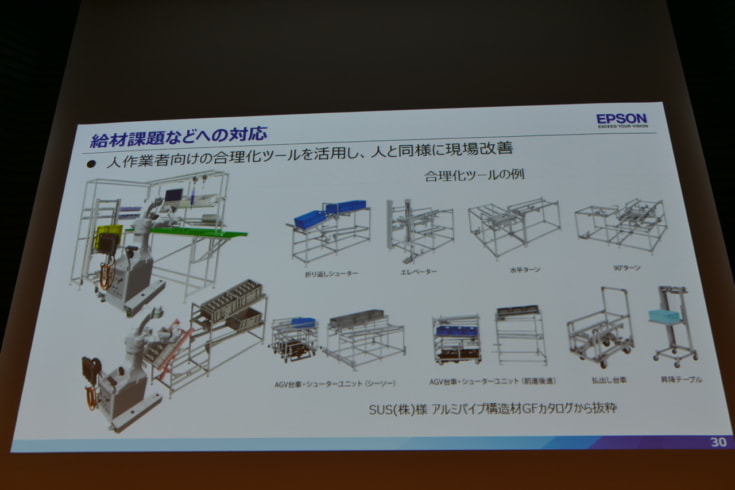
足はないので、周辺の給材など、人向けの合理化ツールを活用して現場改善していく。
今後まだまだ必要な技術は多い。安全性確保によるヒト協調技術、移動能力の拡張による稼働範囲拡張、反射光への対応、認識技術の強化・速度の向上、干渉物の認識、ビジュアルサーボによる複雑な作業、より簡単な作業指示や作業記述方式などだ。今後、これらの開発を順次進めていく。




この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
森山 和道PR







このカテゴリの新着記事




注目のロボット









注目のロボット企業







連載・コラム

